
Exploring the Regulation Reliability of a Pumped Storage Power Plant in a Wind–Solar Hybrid Power Generation System

 ,
,
Abstract
:1. Introduction
2. Model and Method
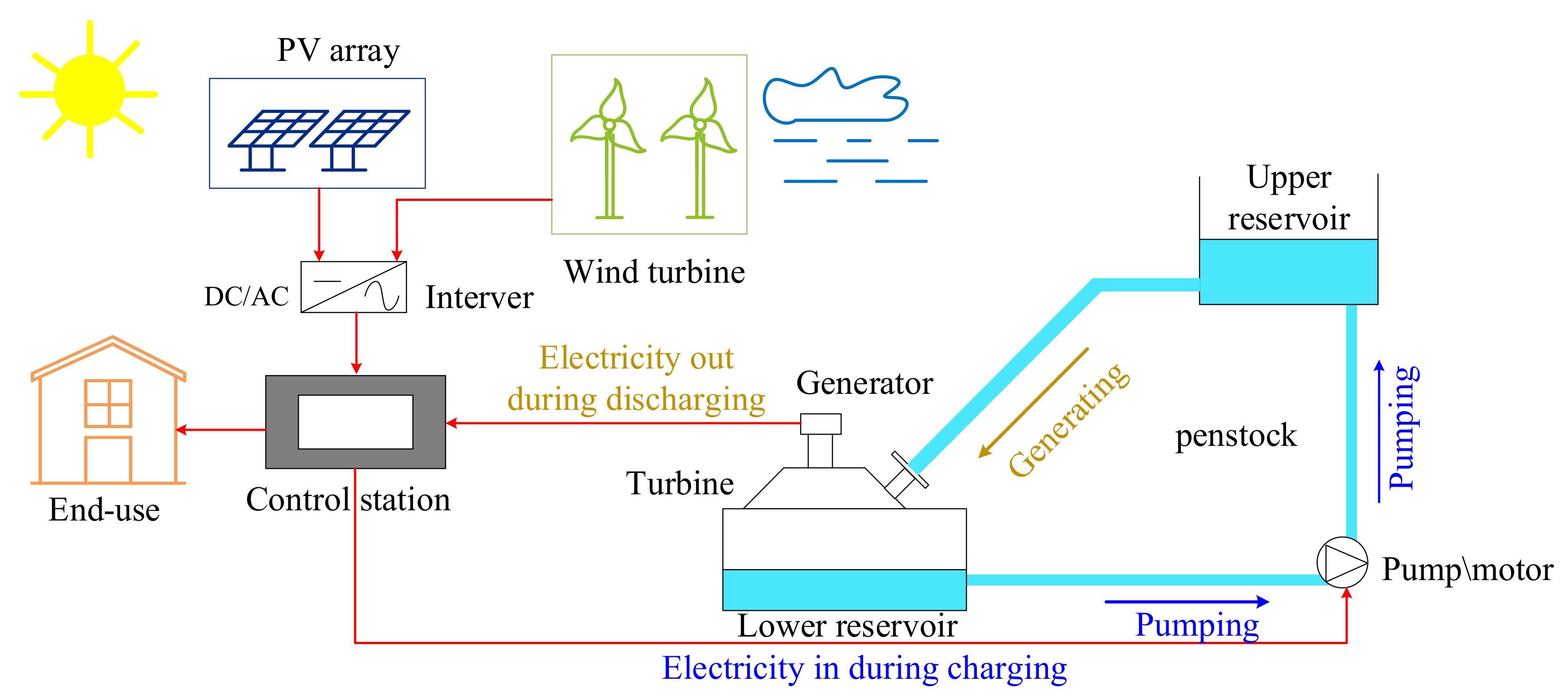
2.1. Model of the Pumped Storage Power Plant
2.1.1. Penstock
2.1.2. Hydraulic Speed Regulation System
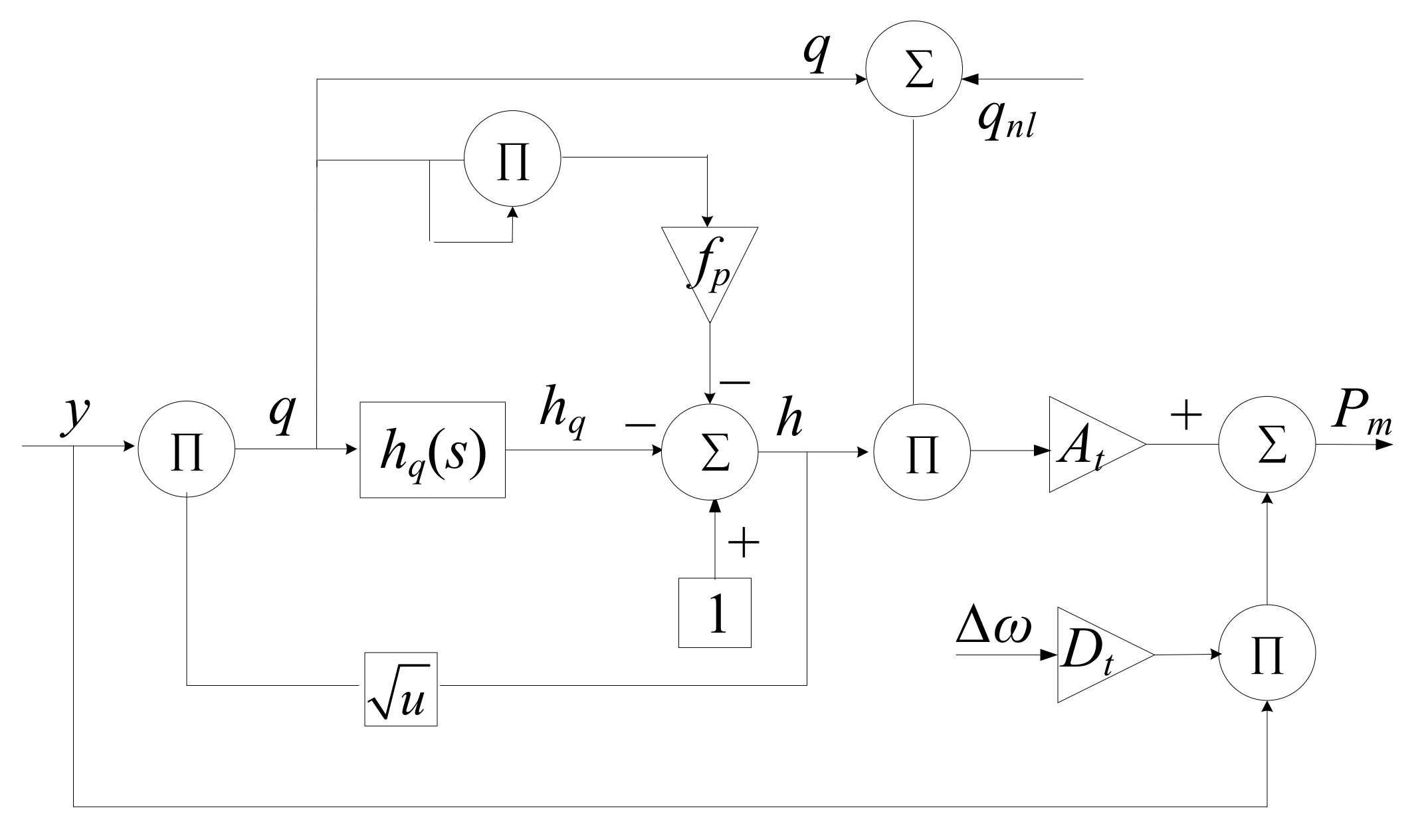
2.1.3. Turbine
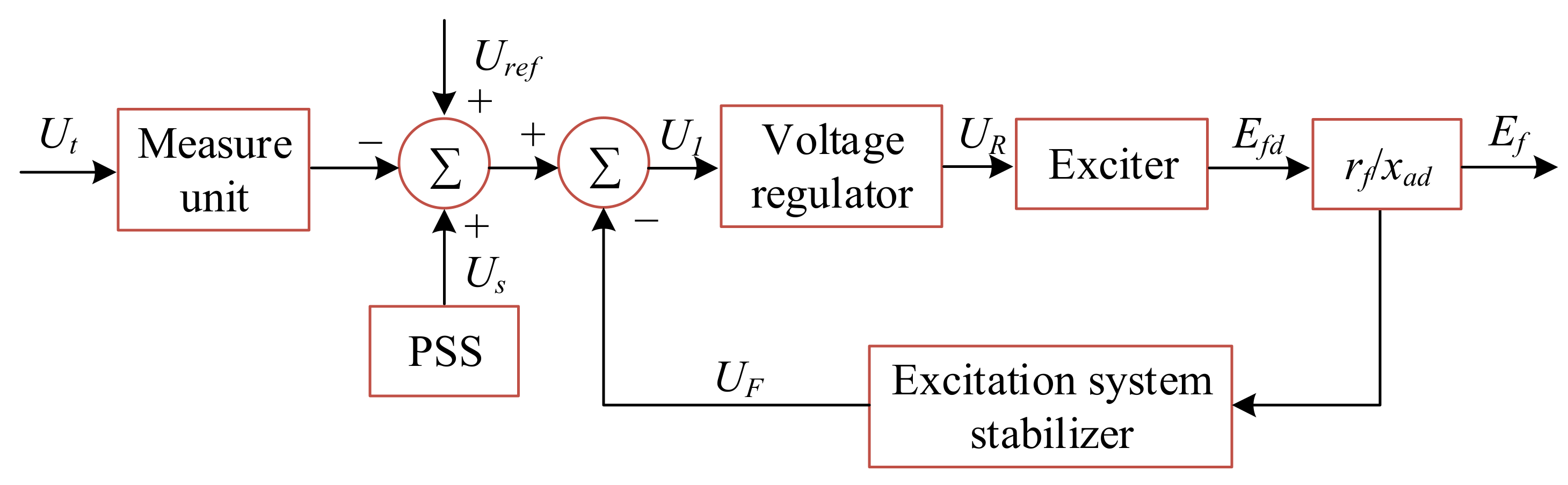
2.1.4. Excitation System
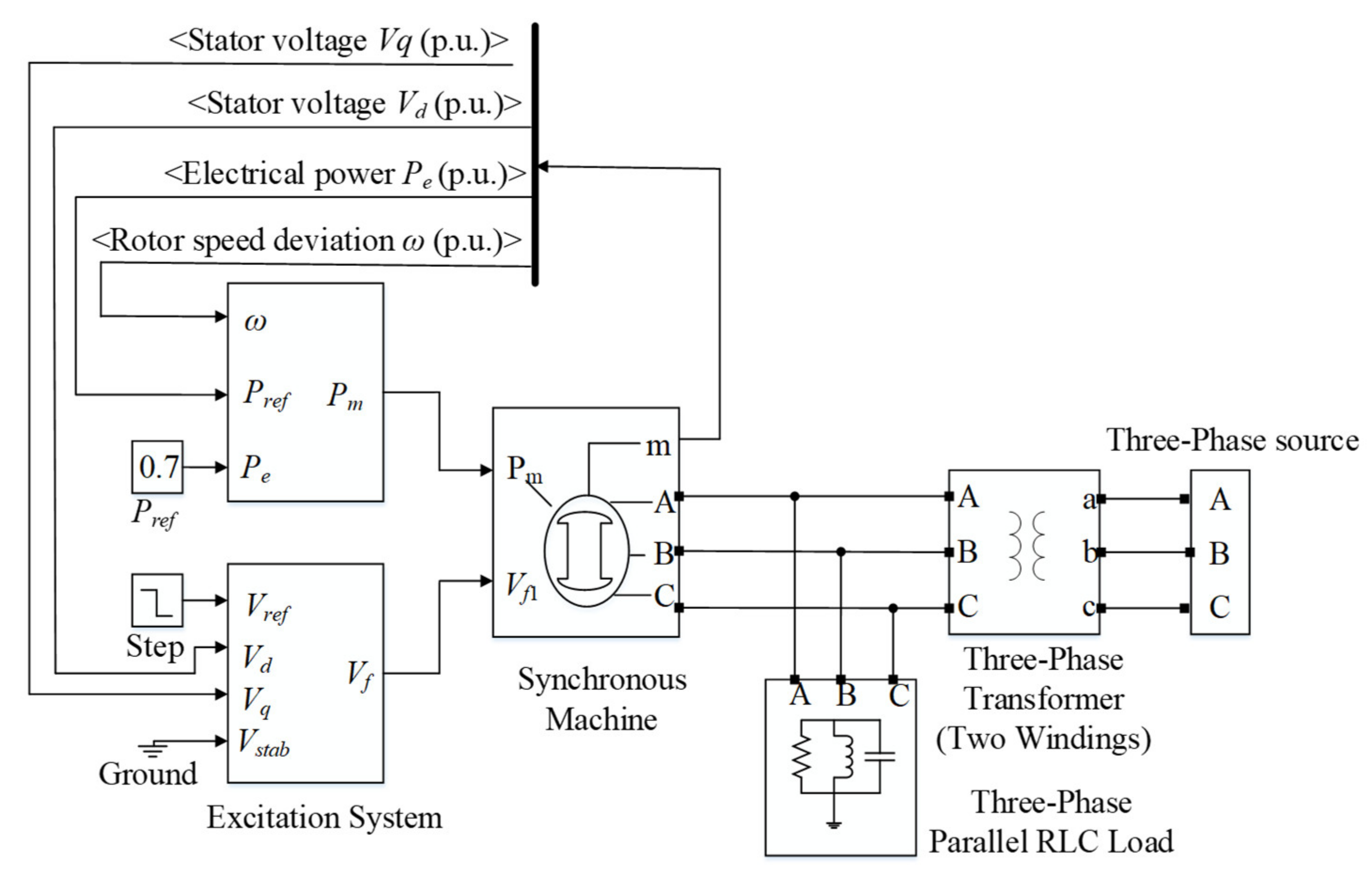
2.1.5. Generator
2.1.6. Pumped Storage Power Plant Model
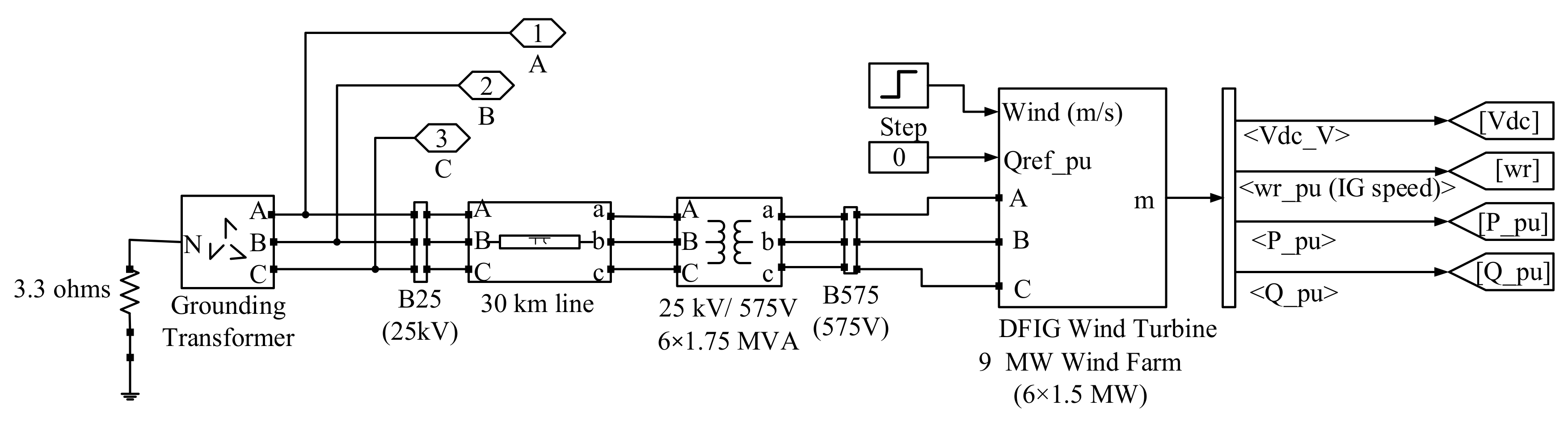
2.2. Wind Power Generation System (WPGS)
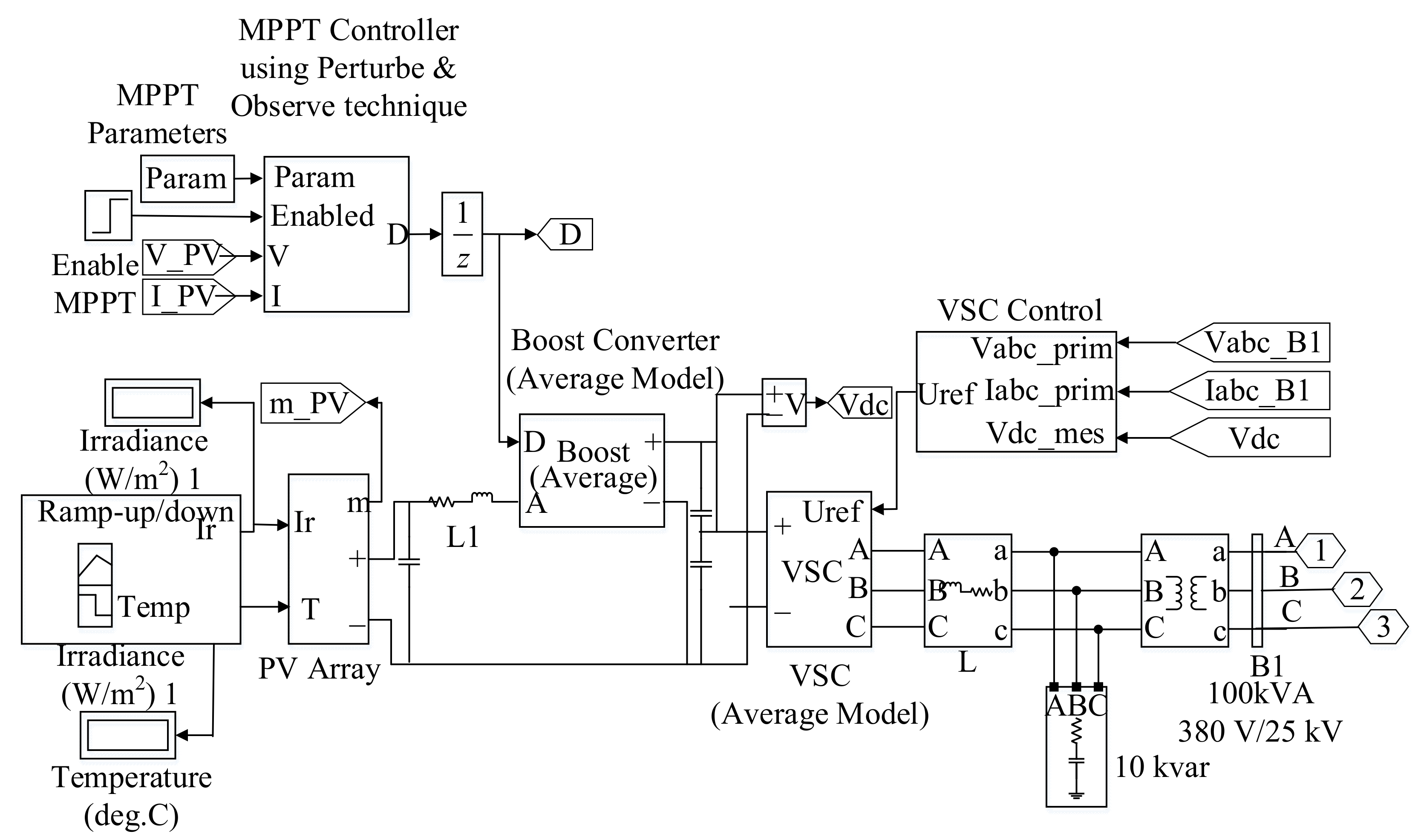
2.3. Photovoltaic Power Generation System (PPGS)
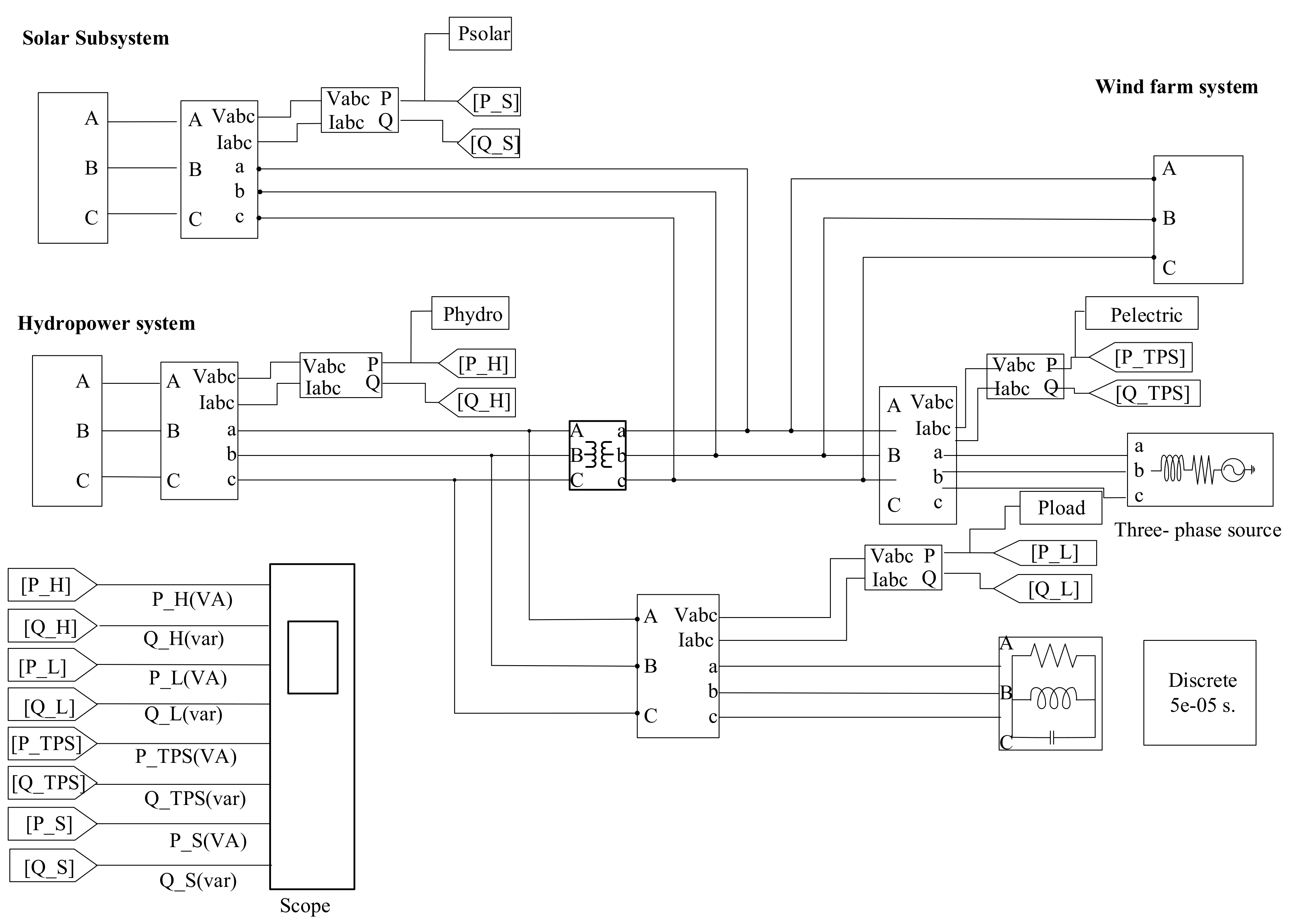
2.4. Model of the Wind−Solar−Hydro Hybrid System
2.5. Uncertainty Analysis
2.6. Sensitivity Analysis
2.7. Reliability Analysis
2.7.1. First-Order Reliability Method
2.7.2. Second-Order Reliability Method
3. Numerical Experiments
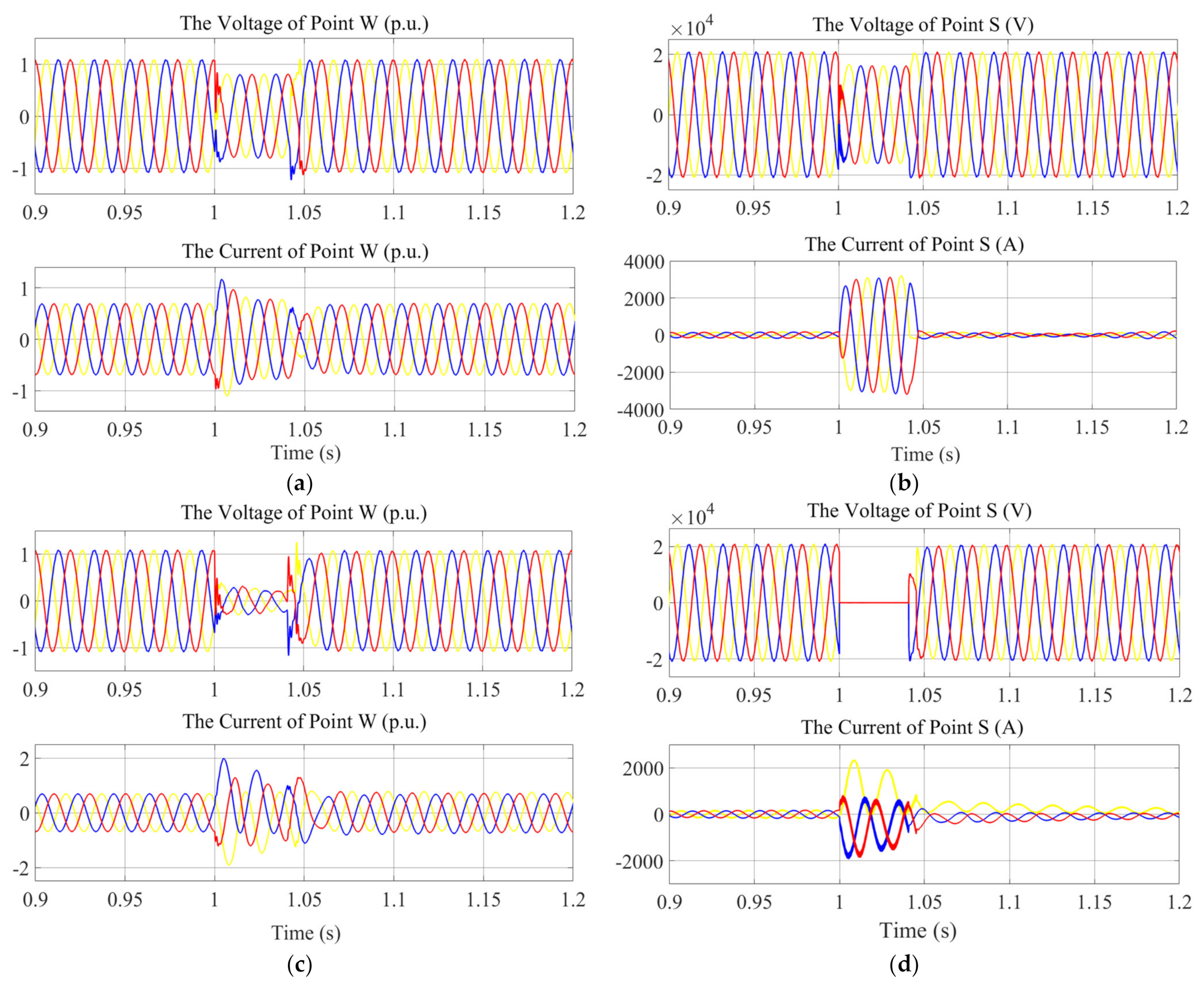
3.1. Dynamic Characteristics of WSH System in Steady and Fault States
3.2. Dynamic Performance Indexes (DPIs)
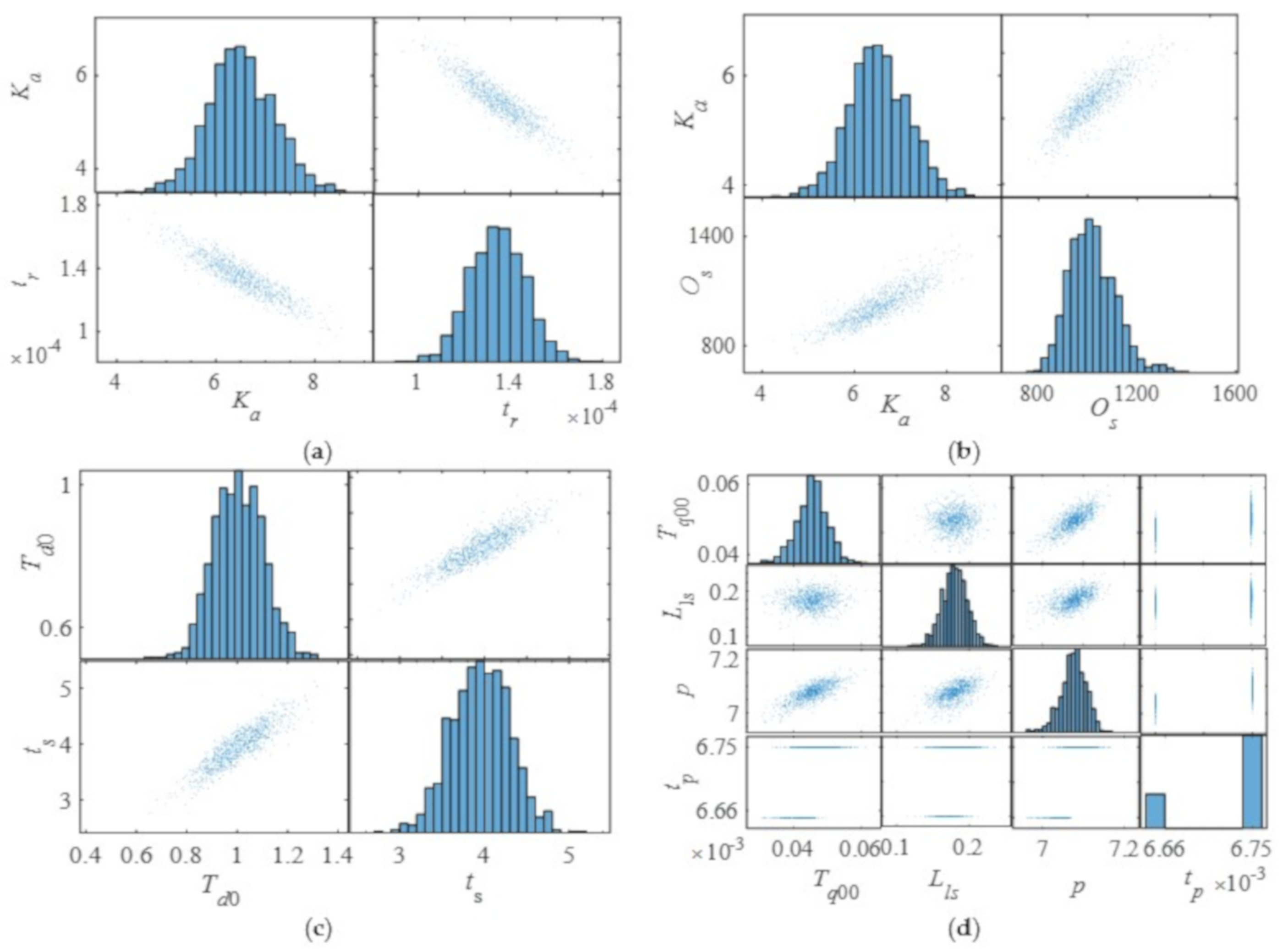
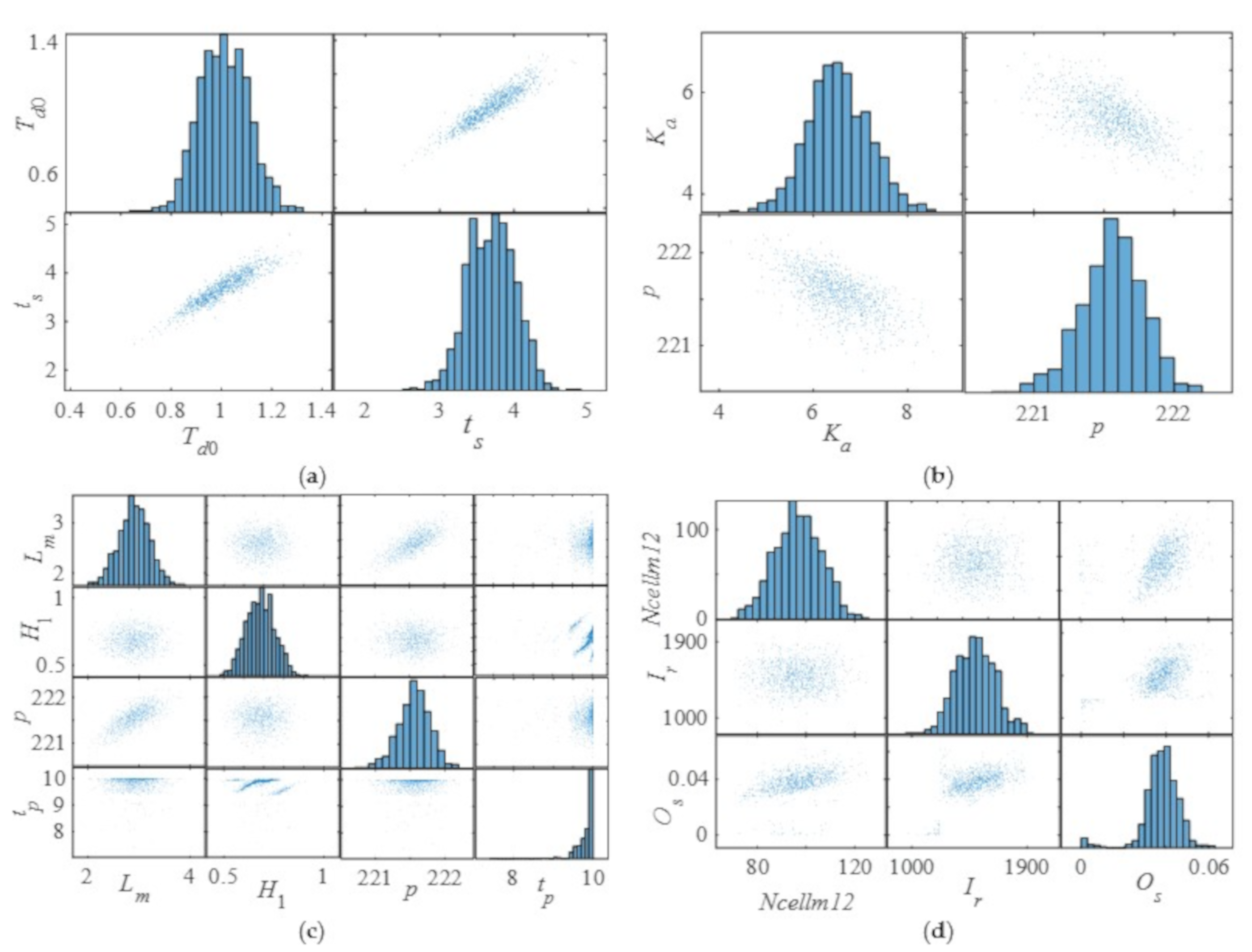
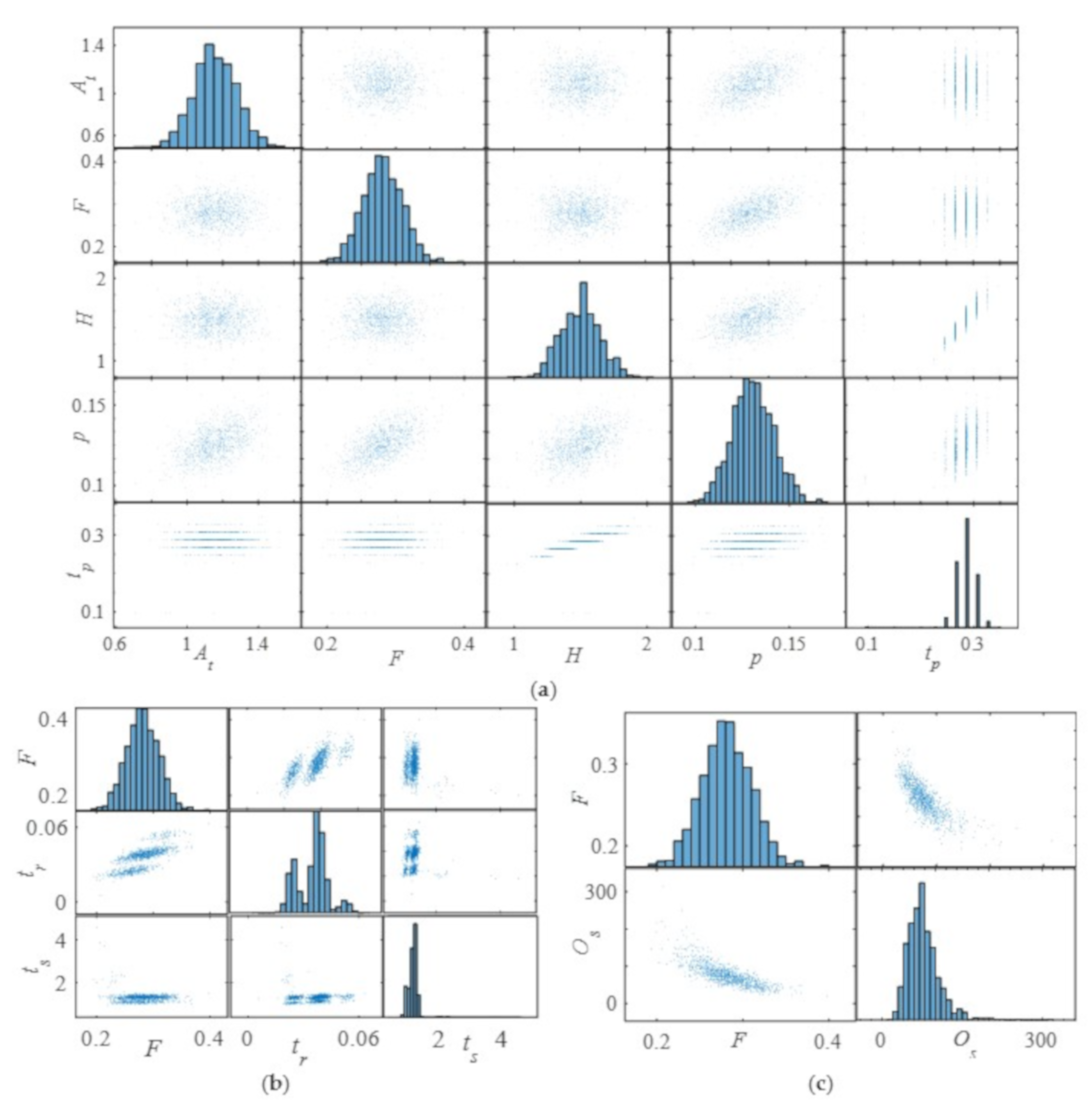
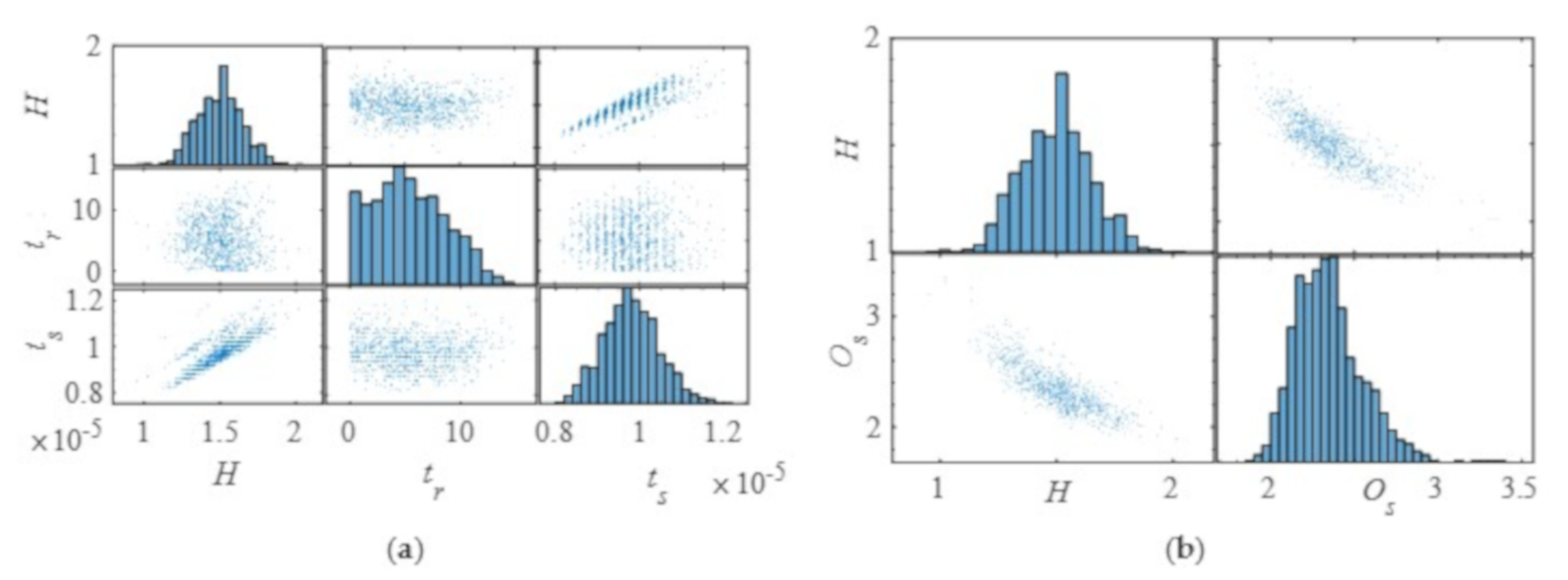
3.3. Uncertainty Analysis
3.4. Sensitivity Analysis
4. Reliability Analysis
5. Conclusions
- (1)
- The influence rules of the model parameters on the WSH hybrid system are obtained from the uncertainty analysis. Parameters of the wind, solar and hydro subsystem show the different influence on DPIs of the PSPP output due to parameters uncertainty. Both PSPP and WPGS parameters have a deterministic effect on the DPIs of reactive power, while the influence of PPGS has no regularity. The uncertain parameters of WPGS, PSPP and PPGS have regularity influence on the DPIs of the generator terminal voltage. Only PSPP parameters show certainty influence on the DPIs of the guide vane opening and angular velocity. The results also mean that the coupling effect of subsystems has the ability to affect the DPIs of PSPP in a certain case.
- (2)
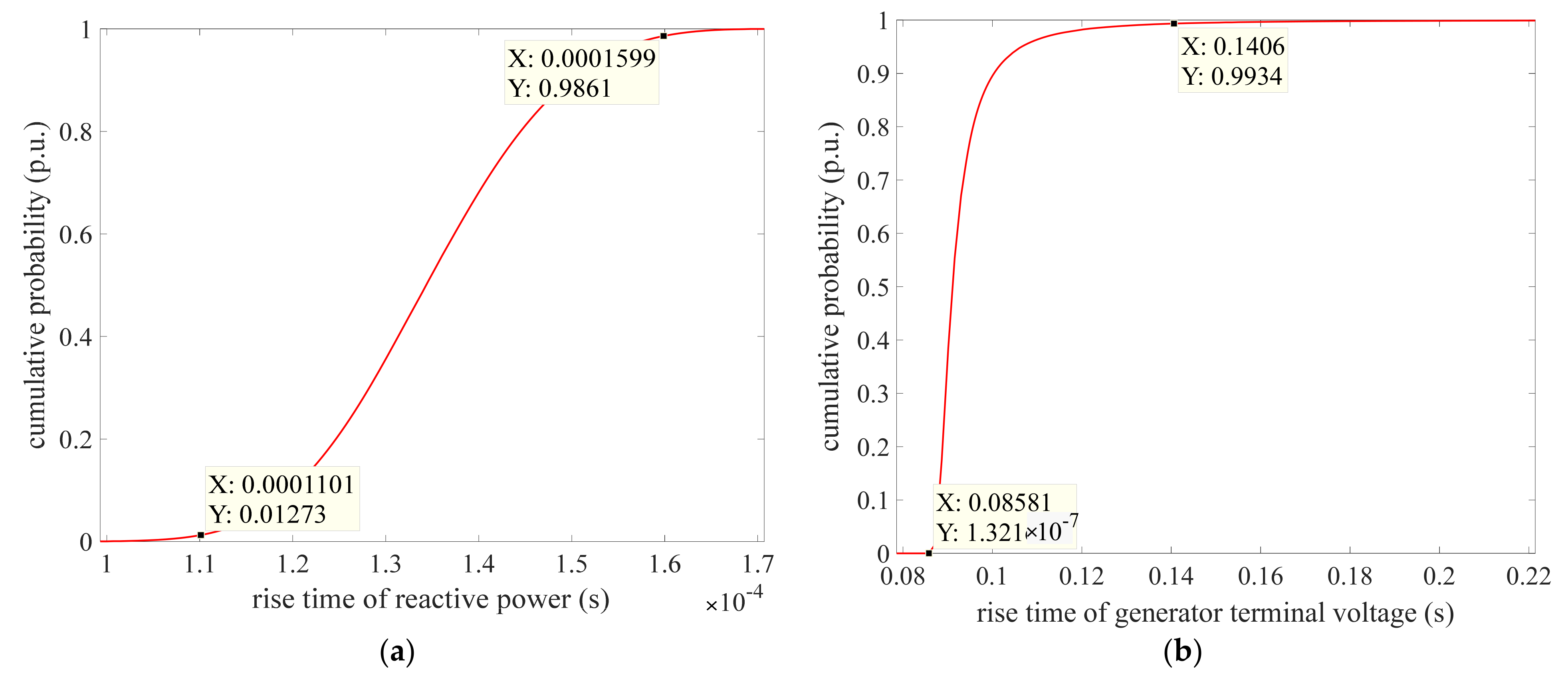
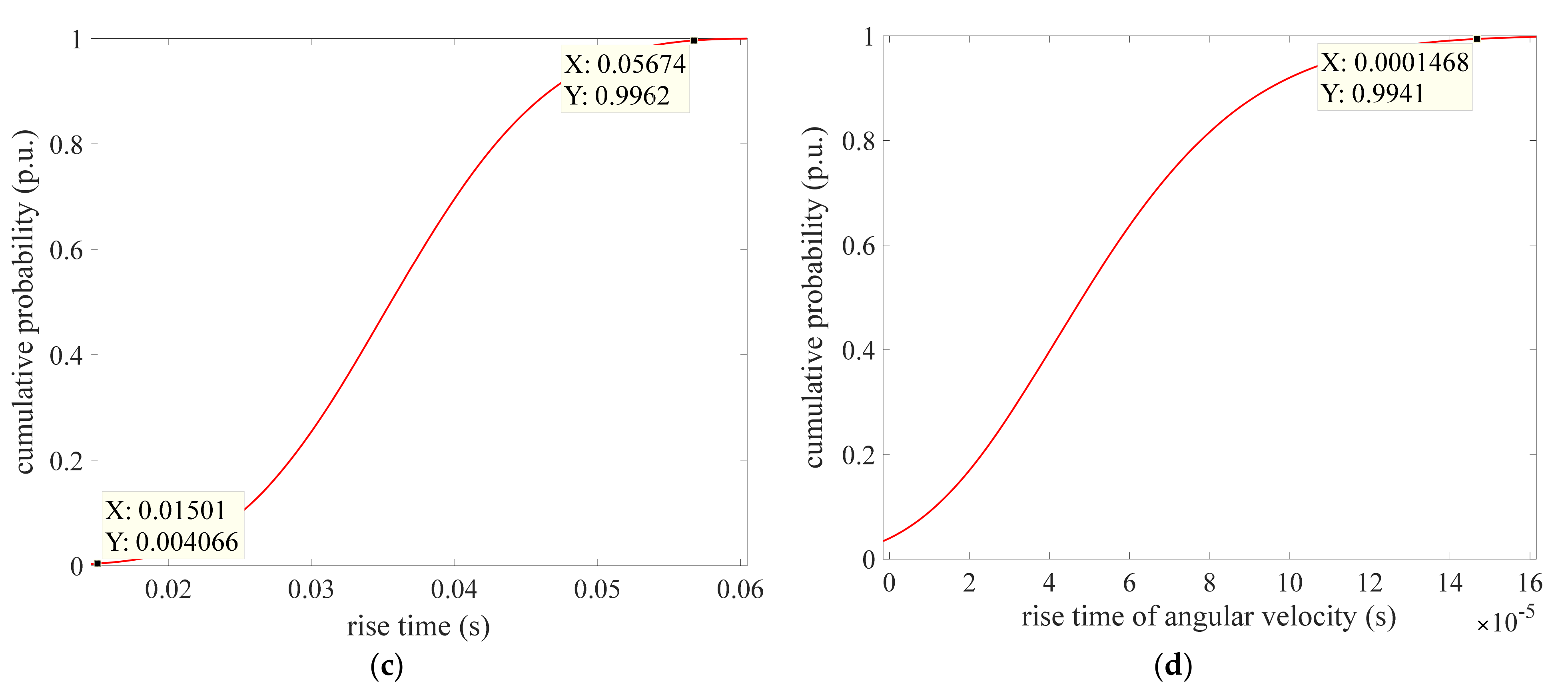
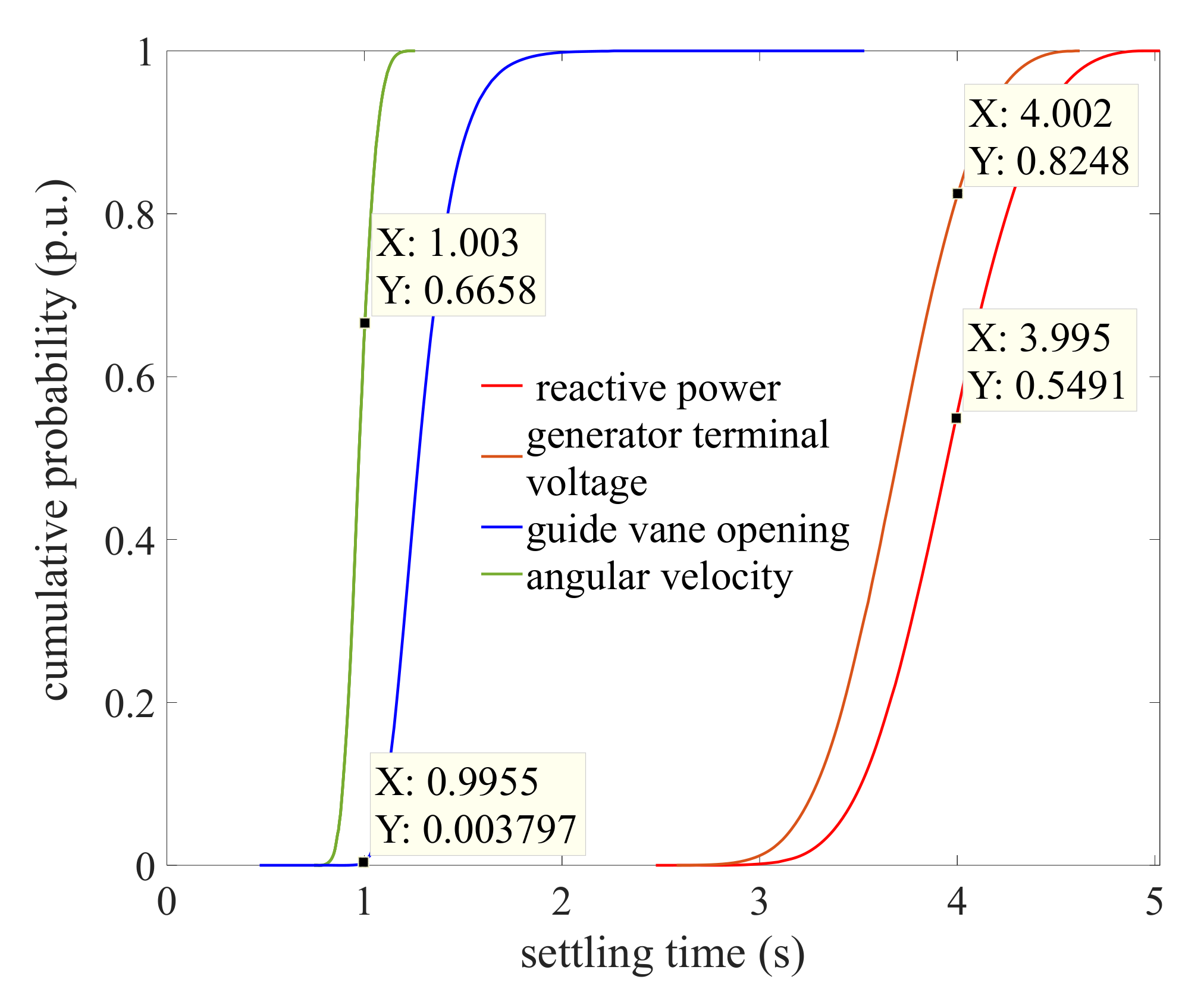
- For the same DPI, the cumulative probability distributions of different output variables are significantly different from each other. Regarding different DPIs, the cumulative probability distributions of the same output variable are also different. In general, the settling time is larger than rising time.
- (3)
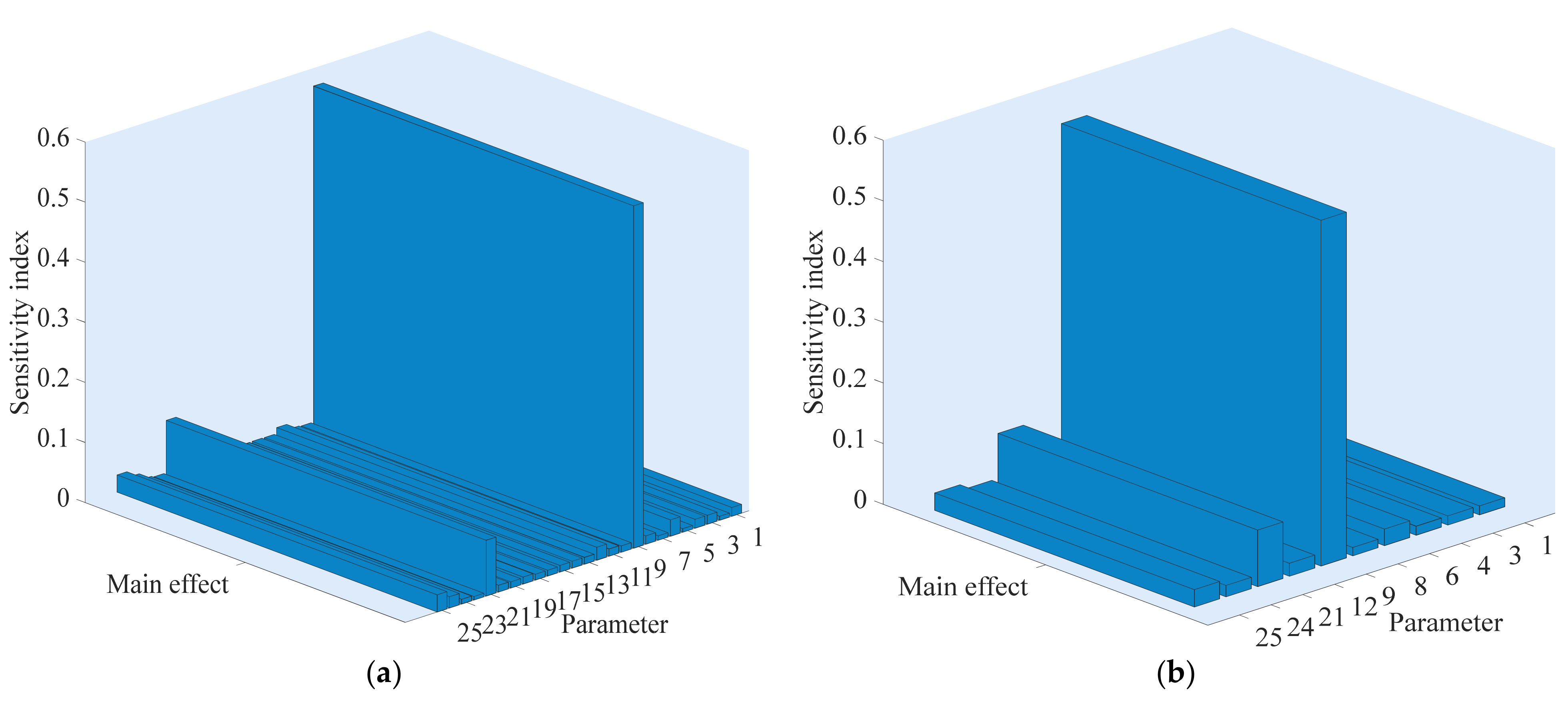
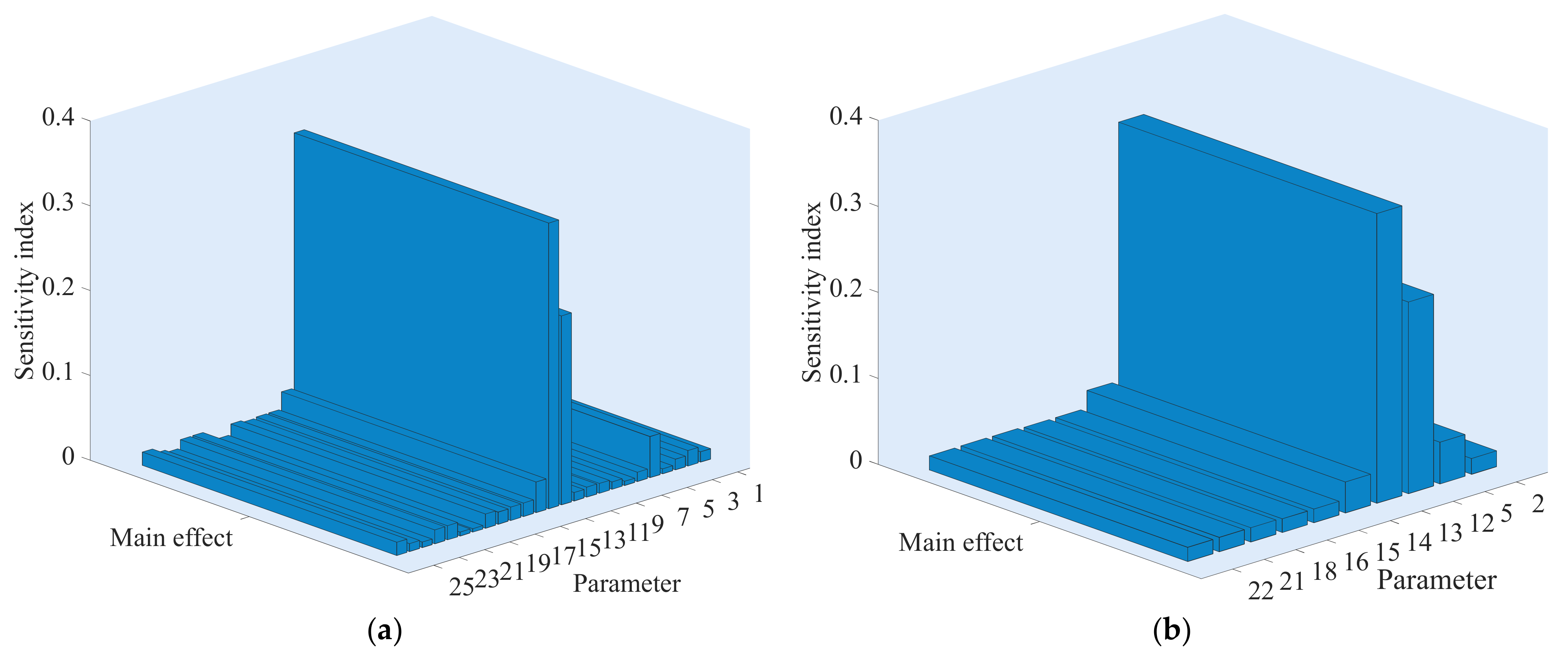
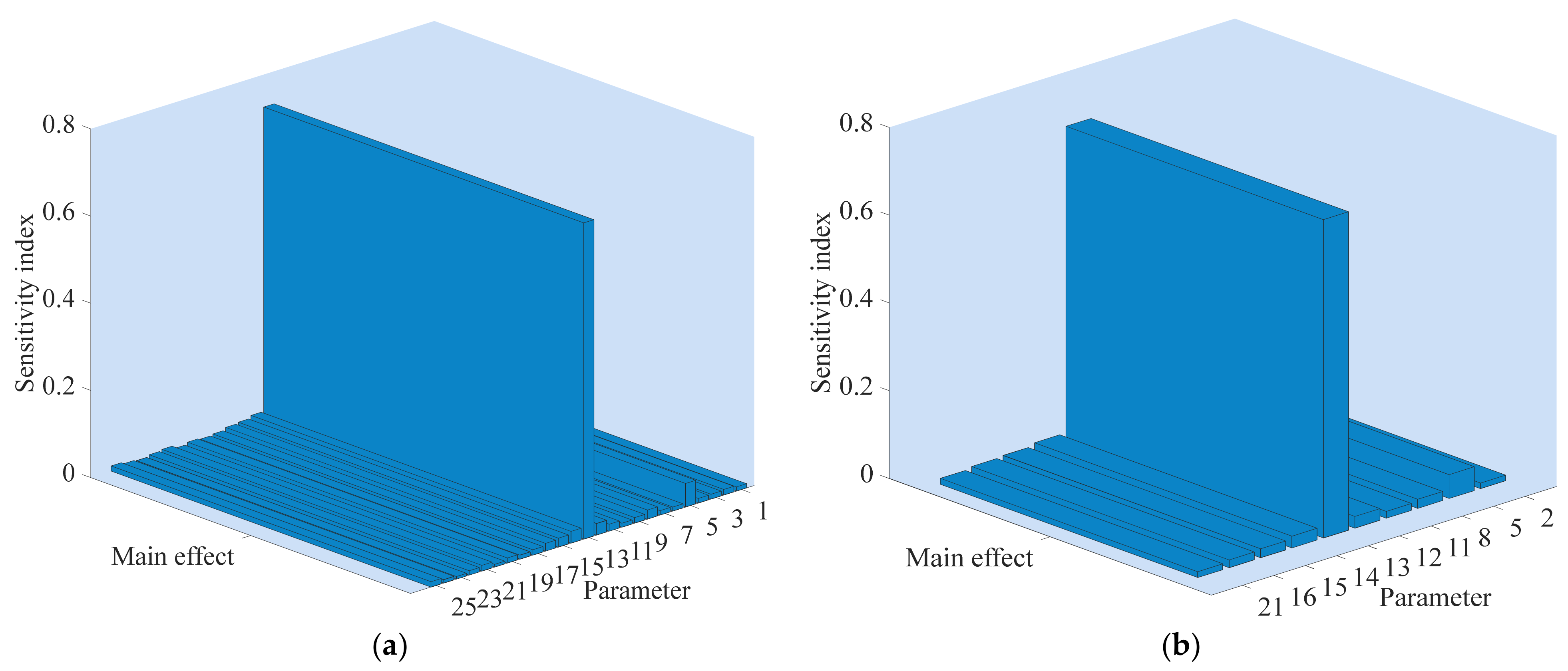
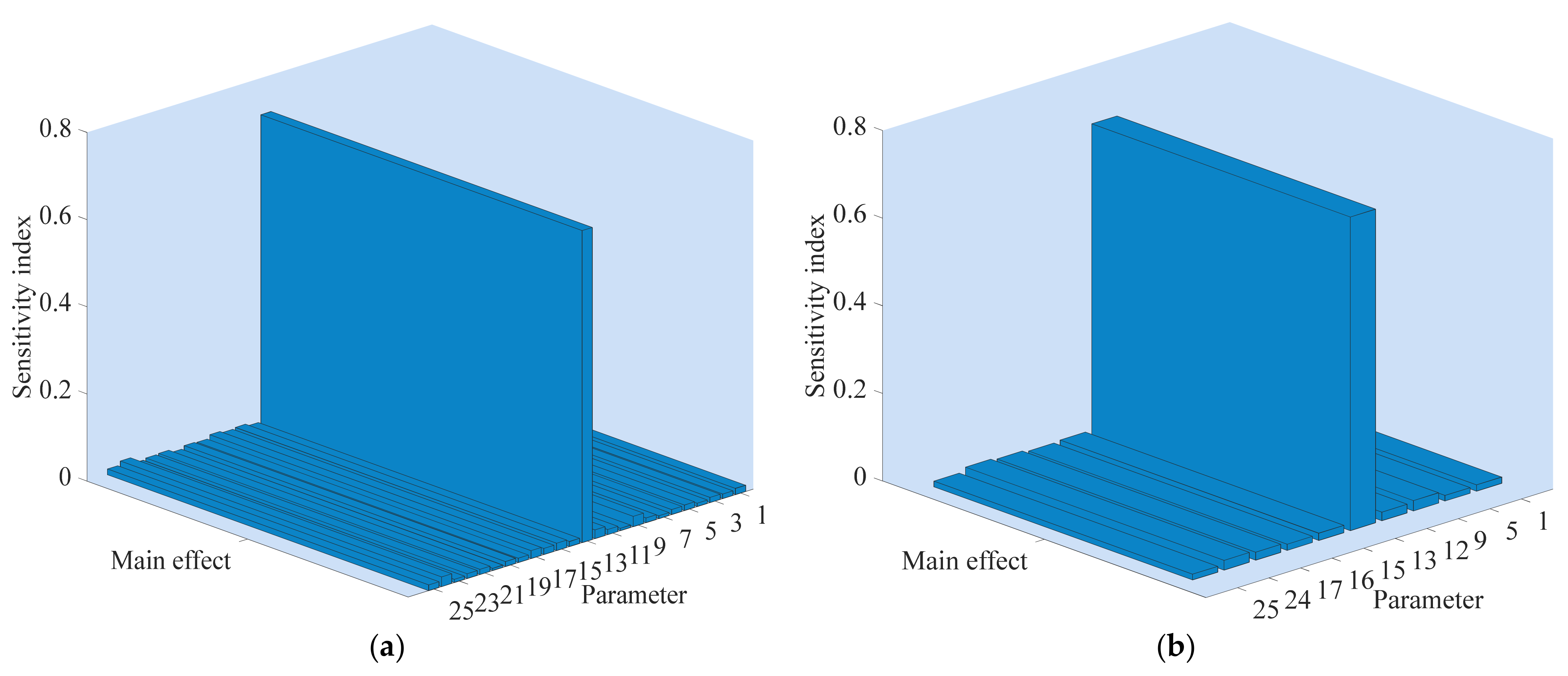
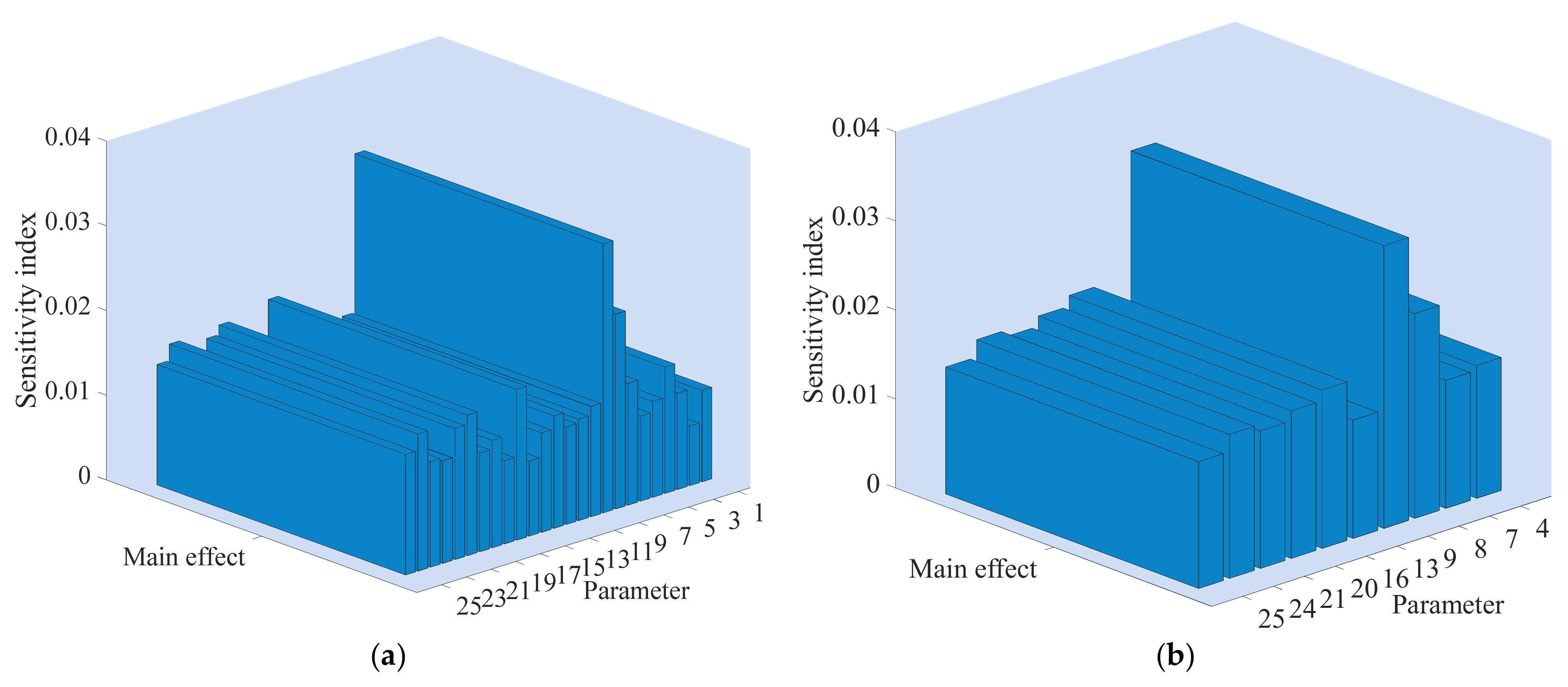
- The sensitivity degree of different DPIs to system parameters is obviously different, and even the same parameter has a different effect on the response speed and response stability of the angular velocity. The total contribution rate of the top 10 sensitive parameters on the rise time, settling time, peak value, peak time and overshoot of the angular velocity is 81.77%, 74.45%, 72.55%, 87.15% and 17.764%, respectively. Meanwhile, parameters of WPGS and PPGS have the ability to indirectly affect the angular velocity of PSPP by interacting with other parameters.
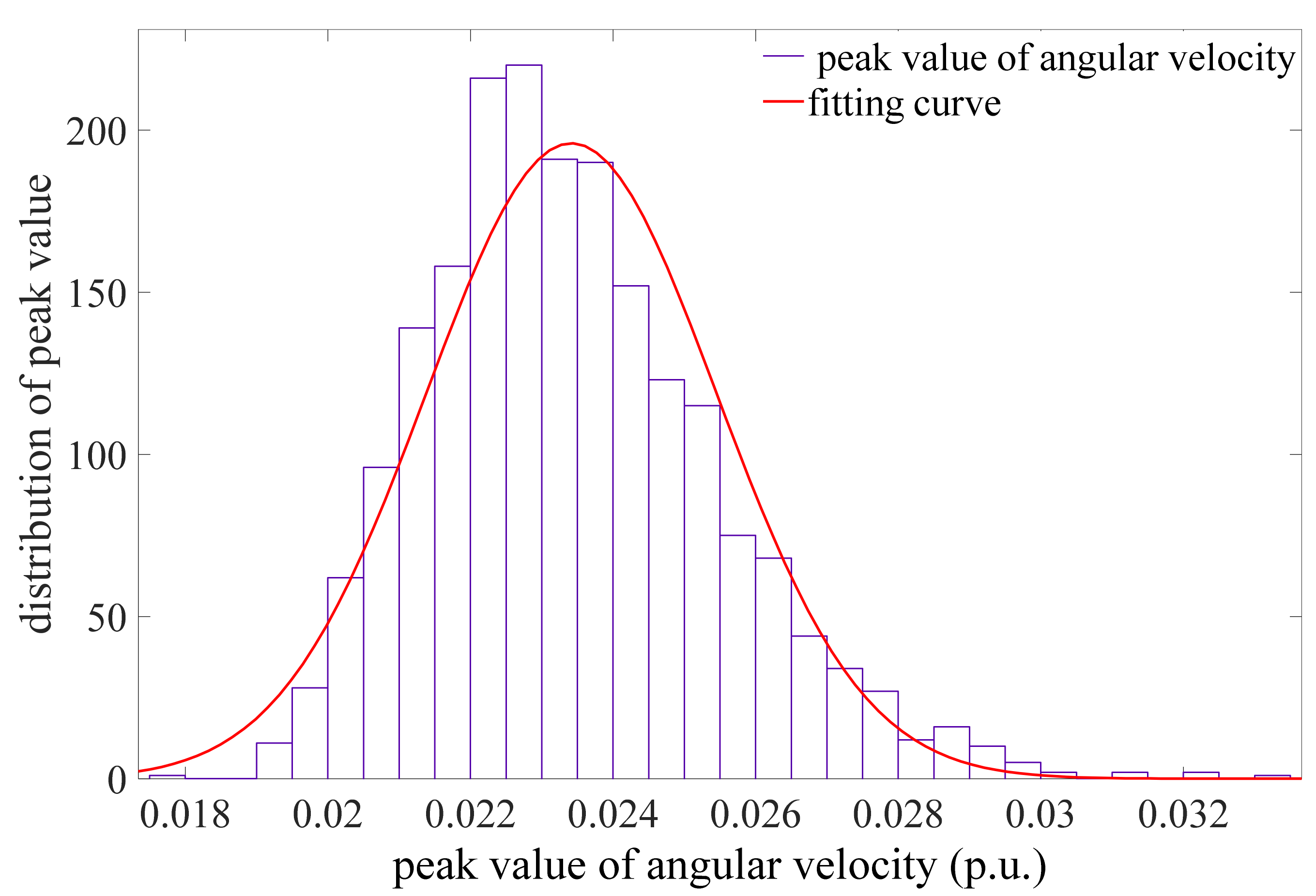
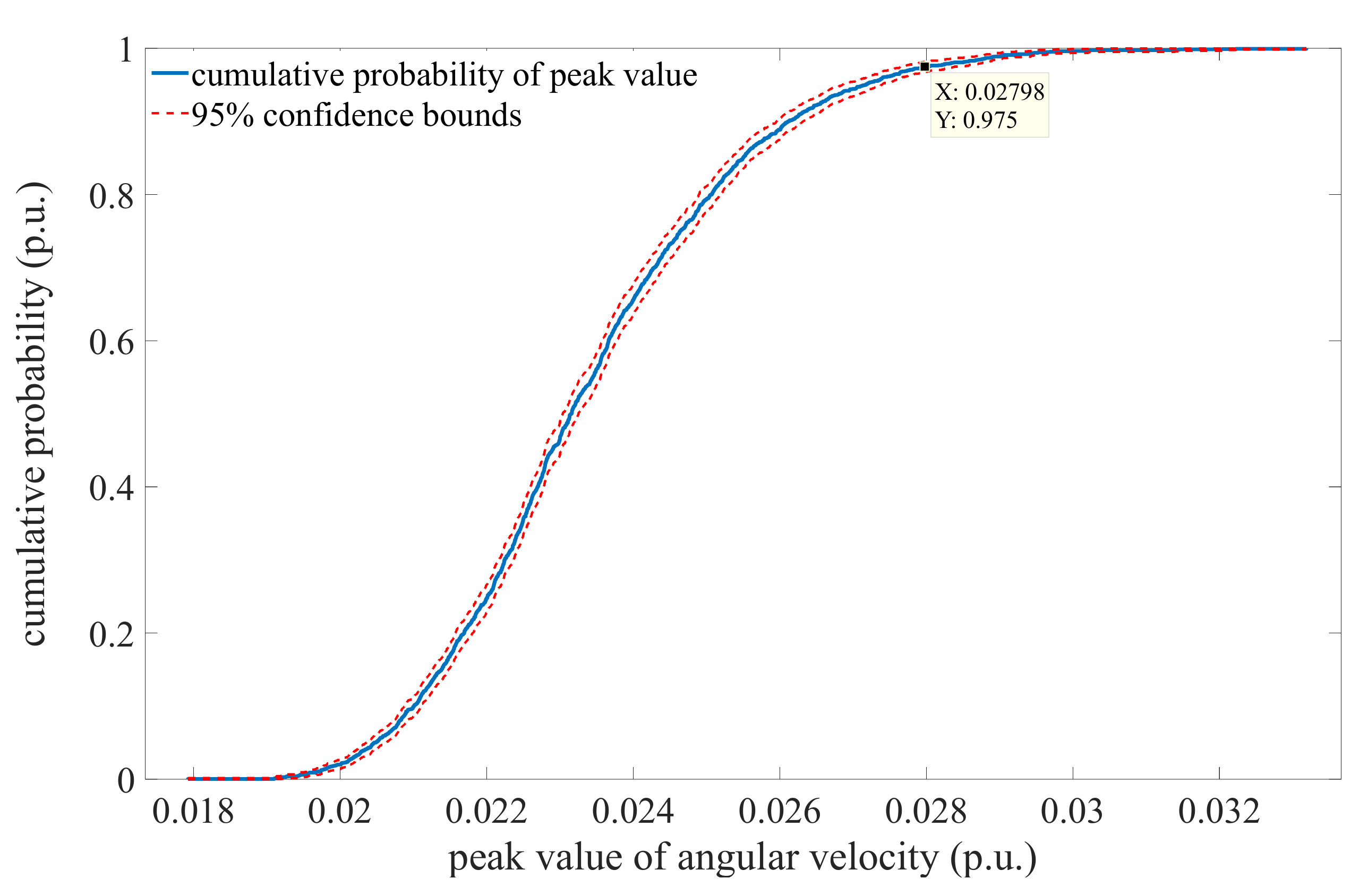
- (4)
- The peak value of angular velocity is distributed between 0.017 and 0.034. Most of the peak value of the angular velocity is in the range of 0.022 to 0.024, and the values on both sides are relatively small. There is a 2.5% probability that the system cannot meet the requirements of operation reliability, which may have a bad impact on the corresponding equipment or even threaten the normal operation of the system.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dynamic Performance Indexes of System under Unit Step Response | ||
|---|---|---|
 | ||
| DPIs | Equations | Symbol and physical meaning |
| tr | ξ: the damping ratio ωd: the damped oscillation frequency, ωd = ωn(1 − ξ2)1/2 | |
| ts | ωn: the underdamped oscillation frequency Δ: the error band | |
| tp | ωd: the damped oscillation frequency, ωd= ωn(1−ξ2)1/2 | |
| os | ξ: the damping ratio | |
| p | ------ | ------ |
Appendix B
| No. | Parameter | Physical Meaning | Unit | Mean | Variance | Distribution |
|---|---|---|---|---|---|---|
| 1 | T | transfer function parameter | p.u. | 10 | 1 | Normal |
| 2 | Kp | proportional adjustment coefficient | p.u. | 1.6 | 0.16 | Normal |
| 3 | bp | adjustment coefficient | p.u. | 0.01 | 0.001 | Normal |
| 4 | Kd | differential adjustment coefficient | s | 2 | 0.2 | Normal |
| 5 | At | turbine gain | p.u. | 1.1534 | 0.11534 | Normal |
| 6 | Dt | damping factor | p.u. | 5 | 0.5 | Normal |
| 7 | fp | head loss coefficients | p.u. | 0.0028 | 0.00028 | Normal |
| 8 | qnl | no-load flow deviation | p.u. | 0.15 | 0.015 | Normal |
| 9 | T0 | transfer function parameter | p.u. | 0.47 | 0.047 | Normal |
| 10 | Td0 | transient time constant of d-axis in short circuit | p.u. | 1.01 | 0.101 | Normal |
| 11 | Td00 | super transient time constant of d-axis in short circuit | p.u. | 0.045 | 0.0045 | Normal |
| 12 | Tq00 | super transient time constant of q-axis in short circuit | p.u. | 0.045 | 0.0045 | Normal |
| 13 | H | inertia coefficient | p.u. | 1.5 | 0.15 | Normal |
| 14 | F | friction factor | p.u. | 0.28 | 0.028 | Normal |
| 15 | Ka | regulator gain | p.u. | 6.5 | 0.65 | Normal |
| 16 | Rs | stator resistance | p.u. | 0.023 | 0.0023 | Normal |
| 17 | Lls | stator inductance | p.u. | 0.18 | 0.018 | Normal |
| 18 | Rr | rotor resistance | p.u. | 0.016 | 0.0016 | Normal |
| 19 | Llr | rotor inductance | p.u. | 0.16 | 0.016 | Normal |
| 20 | Lm | magnetizing inductance | p.u. | 2.9 | 0.29 | Normal |
| 21 | H1 | wind inertia constant | p.u. | 0.685 | 0.0685 | Normal |
| 22 | F1 | wind friction factor | p.u. | 0.21 | 0.021 | Normal |
| 23 | WS | wind speed | m/s | 20 | 2 | Normal |
| 24 | Ncellm12 | number of photorefractive array units | p.u. | 96 | 9.6 | Normal |
| 25 | Ir | intensity of illumination | w/m2 | 1500 | 150 | Normal |
References
- Rosa, C.D.C.S.; Costa, K.A.; Christo, E.D.; Bertahone, P.B. Complementarity of hydro, photovoltaic, and wind power in Rio de Janeiro state. Sustainability 2017, 9, 1130. [Google Scholar]
- Hou, J.J.; Li, C.S.; Guo, W.C.; Fu, W.L. Optimal successive start-up strategy of two hydraulic coupling pumped storage units based on multi-objective control. Int. J. Electr. Power Energy Syst. 2019, 111, 398–410. [Google Scholar] [CrossRef]
- Yang, W.J.; Yang, J.D. Advantage of variable-speed pumped storage plants for mitigating wind power variations: Integrated modelling and performance assessment. Appl. Energy 2019, 237, 720–732. [Google Scholar] [CrossRef]
- Sarasua, J.I.; Perez-Diaz, J.I.; Wilhelmi, J.R.; Sanchez-Fernandez, J.A. Dynamic response and governor tuning of a long penstock pumped-storage hydropower plant equipped with a pump-turbine and a doubly fed induction generator. Energy Convers. Manag. 2015, 106, 151–164. [Google Scholar] [CrossRef]
- Xu, B.B.; Chen, D.Y.; Venkateshkumar, M.; Xiao, Y.; Yue, Y.; Xing, Y.Q.; Li, P.Q. Modeling a pumped storage hydropower integrated to a hybrid power system with solar-wind power and its stability analysis. Appl. Energy 2019, 248, 446–462. [Google Scholar] [CrossRef]
- Han, S.; Zhang, L.N.; Liu, Y.Q.; Zhang, H.; Yan, J.; Li, L.; Lei, X.H.; Wang, X. Quantitative evaluation method for the complementarity of wind-solar-hydro power and optimization of wind-solar ratio. Appl. Energy 2019, 236, 973–984. [Google Scholar] [CrossRef]
- François, B.; Hingray, B.; Raynaud, D.; Borga, M.; Creutin, J.D. Increasing climate-related-energy penetration by integrating run-of-the river hydropower to wind/solar mix. Renew. Energy 2016, 87, 686–696. [Google Scholar] [CrossRef]
- Cantao, M.P.; Bessa, M.R.; Bettega, R.; Detzel, D.H.M.; Lima, J.M. Evaluation of hydro-wind complementarity in the Brazilian territory by means of correlation maps. Renew. Energy 2017, 101, 1215–1225. [Google Scholar] [CrossRef]
- Tang, R.B.; Yang, J.D.; Yang, W.J.; Zou, J.; Lai, X. Dynamic regulation characteristics of pumped-storage plants with two generating units sharing common conduits and busbar for balancing variable renewable energy. Renew. Energy 2019, 135, 1064–1077. [Google Scholar] [CrossRef]
- Martinez-Lucas, G.; Sarasua, J.I.; Sanchez-Fernandez, J.A.; Wilhelmi, J.R. Power-frequency control of hydropower plants with long penstocks in isolated systems with wind generation. Renew. Energy 2015, 83, 245–255. [Google Scholar] [CrossRef] [Green Version]
- Martinez-Lucas, G.; Sarasua, J.I.; Sanchez-Fernandez, J.A.; Wilhelmi, J.R. Frequency control support of a wind-solar isolated system by a hydropower plant with long tail-race tunnel. Renew. Energy 2016, 90, 362–376. [Google Scholar] [CrossRef] [Green Version]
- Parida, A.; Chatterjee, D. An improved control scheme for grid connected doubly fed induction generator considering wind-solar hybrid system. Int. J. Electr. Power Energy Syst. 2016, 77, 112–122. [Google Scholar] [CrossRef]
- Qin, Z.L.; Li, W.Y.; Xiong, X.F. Incorporating multiple correlations among wind speeds, photovoltaic powers and bus loads in composite system reliability evaluation. Appl. Energy 2013, 110, 285–294. [Google Scholar] [CrossRef]
- Hu, P.; Karki, R.; Billinton, R. Reliability evaluation of generating systems containing wind power and energy storage. IET Gener. Transm. Distrib. 2009, 3, 783–791. [Google Scholar] [CrossRef]
- Zheng, Y.N.; Ren, D.M.; Guo, Z.Y.; Hu, Z.G.; Wen, Q. Research on integrated resource strategic planning based on complex uncertainty simulation with case study of China. Energy 2019, 180, 772–786. [Google Scholar] [CrossRef]
- Billinton, R.; Karki, R. Incorporating wind power in generating system reliability evaluation. Int. J. Syst. Assur. Eng. Manag. 2010, 1, 120–128. [Google Scholar] [CrossRef]
- Hashemi-Dezaki, H.; Askarian-Abyaneh, H.; Haeri-Khiavi, H. Impacts of direct cyber-power interdependencies on smart grid reliability under various penetration levels of microturbine/wind/solar distributed generations. IET Gener. Transm. Distrib. 2016, 10, 928–937. [Google Scholar] [CrossRef]
- Li, H.H.; Mahmud, M.A.; Arzaghi, E.; Abbassi, R.; Chen, D.Y.; Xu, B.B. Assessments of economic benefits for hydro-wind power systems: Development of advanced model and quantitative method for reducing the power wastage. J. Clean Prod. 2020, 277, 123823. [Google Scholar] [CrossRef]
- Ma, T.; Yang, H.; Lu, L.; Peng, J. Technical feasibility study on a standalone hybrid solar-wind system with pumped hydro storage for a remote island in Hong Kong. Renew. Energy 2014, 69, 7–15. [Google Scholar] [CrossRef]
- IEEE Group. Hydraulic turbine and turbine control models for system dynamic studies. IEEE Trans. Power Syst. 1992, 7, 167–179. [Google Scholar] [CrossRef]
- Zeng, Y.; Guo, Y.K.; Zhang, L.X.; Xu, T.M.; Dong, H.K. Nonlinear hydro turbine model having a surge tank. Math. Comput. Model. Dyn. Syst. 2013, 19, 12–28. [Google Scholar] [CrossRef] [Green Version]
- Wei, S.P. Simulation of Hydraulic Turbine Regulating System, 1st ed.; Huazhong University of Science & Technology Press: Wuhan, China, 2011. (In Chinese) [Google Scholar]
- Zhang, H.; Chen, D.Y.; Xu, B.B.; Wang, F.F. Nonlinear modeling and dynamic analysis of hydro-turbine governing system in the process of load rejection transient. Energy Conv. Manag. 2015, 90, 128–137. [Google Scholar] [CrossRef]
- Roy, T.K.; Mahmud, M.A.; Oo, A.M.T. Robust adaptive backstepping excitation controller design for higher-order models of synchronous generators in multimachine power systems. IEEE Trans. Power Syst. 2019, 34, 40–51. [Google Scholar] [CrossRef]
- Xu, B.B.; Zhang, J.J.; Egusquiza, M.; Chen, D.Y.; Li, F.; Behrens, P.; Egusquiza, E. A review of dynamic models and stability analysis for a hydro-turbine governing system. Renew. Sustain. Energy Rev. 2021, 144, 110880. [Google Scholar] [CrossRef]
- Karakasis, N.; Tsioumas, E.; Jabbour, N.; Bazzi, A.M.; Mademlis, C. Optimal efficiency control in a wind system with doubly fed induction generator. IEEE Trans. Power Electron. 2019, 34, 356–368. [Google Scholar] [CrossRef]
- Coral-Enriquez, H.; Cortes-Romero, J.; Dorado-Rojas, S.A. Rejection of varying-frequency periodic load disturbances in wind-turbines through active disturbance rejection-based control. Renew. Energy 2019, 141, 217–235. [Google Scholar] [CrossRef]
- Bedoud, K.; Rhif, A.; Bahi, T.; Merabet, H. Study of a double fed induction generator using matrix converter: Case of wind energy conversion system. Int. J. Hydrog. Energy 2018, 43, 11432–11441. [Google Scholar] [CrossRef]
- Ranjbaran, P.; Yousefi, H.; Gharehpetian, G.B.; Astaraei, F.R. A review on floating photovoltaic (FPV) power generation units. Renew. Sustain. Energy Rev. 2019, 110, 332–347. [Google Scholar] [CrossRef]
- Ram, J.P.; Babu, T.S.; Rajasekar, N. A comprehensive review on solar PV maximum power point tracking techniques. Renew. Sustain. Energy Rev. 2017, 67, 826–847. [Google Scholar] [CrossRef]
- Kumari, P.A.; Geethanjali, P. Parameter estimation for photovoltaic system under normal and partial shading conditions: A survey. Renew. Sustain. Energy Rev. 2018, 84, 1–11. [Google Scholar] [CrossRef]
- Patelli, E.; Pradlwarter, H.J.; Schueller, G.I. Global sensitivity of structural variability by random sampling. Comput. Phys. Commun. 2010, 181, 2072–2081. [Google Scholar] [CrossRef] [Green Version]
- Pradlwarter, H.J. Relative importance of uncertain structural parameters, part I: Algorithm. Comput. Mech. 2007, 40, 627–635. [Google Scholar] [CrossRef]
- Iooss, B.; Le Gratiet, L. Uncertainty and sensitivity analysis of functional risk curves based on Gaussian processes. Reliab. Eng. Syst. Saf. 2019, 187, 58–66. [Google Scholar] [CrossRef] [Green Version]
- Saltelli, A.; Chan, K.; Scott, E.M. Sensitivity Analysis; Wiley Series in Probability and Statistics; Wiley: New York, NY, USA, 2000. [Google Scholar]
- Sudret, B. Global sensitivity analysis using polynomial chaos expansions. Reliab. Eng. Syst. Saf. 2008, 93, 964–979. [Google Scholar] [CrossRef]
- Klepper, O. Multivariate aspects of model uncertainty analysis: Tools for sensitivity analysis and calibration. Ecol. Model. 1997, 101, 1–13. [Google Scholar] [CrossRef]
- Iooss, B.; Lemaitre, P. A review on global sensitivity analysis methods. Oper. Res. Comput. Sci. Interfaces 2015, 59, 101–122. [Google Scholar]
- Xu, B.B.; Chen, D.Y.; Zhang, X.L.; Alireza, R. Parametric uncertainty in affecting transient characteristics of multi-parallel hydropower systems in the successive load rejection. Int. J. Electr. Power Energy Syst. 2019, 106, 444–454. [Google Scholar] [CrossRef]
- Xu, B.B.; Chen, D.Y.; Patelli, E.; Shen, H.J.; Park, J.H. Mathematical model and parametric uncertainty analysis of a hydraulic generating system. Renew. Energy 2019, 136, 1217–1230. [Google Scholar] [CrossRef] [Green Version]
- Cai, G.Q.; Elishakoff, I. Refined second-order reliability analysis. Struct. Saf. 1994, 14, 267–276. [Google Scholar] [CrossRef]
- Zhao, H.B.; Ru, Z.L.; Chang, X.; Li, S.J. Reliability analysis using chaotic particle swarm optimization. Qual. Reliab. Eng. Int. 2015, 31, 1537–1552. [Google Scholar] [CrossRef]
- Lü, Q.; Sun, H.Y.; Low, B.K. Reliability analysis of ground-support interaction in circular tunnels using the response surface method. Int. J. Rock Mech. Min. Sci. 2011, 48, 1329–1343. [Google Scholar] [CrossRef]
- Hasofer, A.M.; Lind, N.C. Exact and invariant second moment code format. J. Eng. Mech. Div. 1974, 100, 111–121. [Google Scholar] [CrossRef]
- Low, B.K.; Tang, W.H. Reliability analysis of reinforced embankments on soft ground. Can. Geotech. J. 1997, 34, 672–685. [Google Scholar] [CrossRef]
- Low, B.K.; Tang, W.H. Efficient reliability evaluation using spreadsheet. J. Eng. Mech. 1997, 123, 749–752. [Google Scholar] [CrossRef]






















| Unit | Equation | Parameter |
|---|---|---|
| Measure unit | Tr: the time constant of the measure unit s: the Laplace operator | |
| Voltage regulator |  | Tb, Tc: the time constants used to model equivalent time constants inherent Ka: the regulator gain Ta: the regulator time constant UR: the output of the voltage regulator Ut: the generator terminal voltage UR,max, UR,min: the limitation of the voltage |
| Exciter | Te: the exciter time constant Ke: the exciter gain | |
| Excitation system stabilizer | Kf: the gain of the excitation system stabilizer Tf: the time constant of the excitation system stabilizer |
| Symbol | Characteristics | Value |
|---|---|---|
| Voc | the open circuit voltage | 64.2 V |
| Vmp | the optimum operating voltage | 54.7 V |
| Isc | the short circuit current | 5.96 A |
| Imp | the optimum operating current | 5.58 A |
| NCellm | the number of photorefractive array units | 96 |
| beta | the temperature coefficient of Voc | −0.27269 mV/°C |
| alpha | the temperature coefficient of Isc | 0.061745 mA/°C |
| Symbol | Physical Meaning | Symbol | Physical Meaning |
|---|---|---|---|
| hq | the relative value of head caused by flow | Efd | the exciter output voltage |
| H | the inertia coefficient | Ef | the regulator output |
| q | the relative value of flow | Te | the exciter time constant |
| T0 | the elastic time of the equivalent penstock | Ke | the exciter gain |
| α | the water hammer wave speed | Ka | the regulator gain |
| L | the length of penstock | Ta | the time constant |
| Qr | the rated flow | Kf | the gain of the excitation system stabilizer |
| Hr | the rated head | Tf | the time constant of the excitation system stabilizer |
| Ai | the section dimension of penstock | Tb, Tc | the time constants used to model equivalent time constants inherent |
| g | the acceleration of gravity | Vt0 | the initial values of the terminal voltage |
| s | the Laplace operator | Vf0 | the initial values of the field voltage |
| Ty | the engager relay time constant | tr | the low-pass filter time constant |
| Kp | the proportional adjustment coefficient | Pe | the electrical power |
| Ki | the integral adjustment coefficient | Pref | the reference output |
| Kd | the differential adjustment coefficient | A, B, C | the stator voltage input/output terminal |
| δ | the relative value of the rotor angle | a, b, c | the winding rotor output voltage terminal |
| ω | the relative value of the generator rotor speed | dw | the rotor speed deviation |
| y | the relative value of the guide vane opening | Q | the output reactive power |
| Pm | the power output of the hydro turbine per unit | δ | the power angle |
| At | the gain coefficient of the turbine | ifd | the field current |
| qn1 | the no-loading flow per unit | tr | the rise time |
| Dt | the mechanical damping coefficient of the turbine | ts | the settling time |
| Δω | the difference of the angular velocity | p | the peak value |
| hfc | the relative value of the pipe friction head loss | tp | the peak time |
| Ka | the regulator gain | os | the overshoot |
| Vref | the reference value of the stator terminal voltage | T | the transfer function parameter |
| Vd | the stator voltage of the d-axis | Vq | the stator voltage of q-axis |
| Vtf | the stator terminal voltage | F1 | the wind friction factor |
| Rs | the stator resistance | H1 | the wind inertia constant |
| Llr | the rotor inductance | Lm | the magnetizing inductance |
| WS | the wind speed | Ncellm12 | the number of photorefractive array units |
| Ir | the intensity of illumination | PL | the load power |
| Xl | the positive sequence reactance | Xd | the d-axis synchronous reactance |
| Xd0 | the d-axis transient reactance | Xd00 | the d-axis super-transient reactance |
| Xq00 | the q-axis super-transient reactance | Xq | the q-axis synchronous reactance |
| Rs1 | the stator resistance | x | the possible value of the uncertain component |
| Vf | the field voltage | Vstab | the voltage connected to the power system stabilizer |
| Z0 | the surge impedance per unit of the equivalent penstock | Td0 | the transient time constant of the straight axis in short circuit |
| Tq00 | the super transient time constant of the quadrature axis in short circuit | Td00 | the super transient time constant of the straight axis in short circuit |
| S | the state domain | F’ | the failure domain |
| μ | the vector of mean values | μiN | the equivalent normal mean |
| F | the friction factor | C | the covariance matrix |
| [R] | the correlation matrix | β | the Hasofer–Lind index |
| α | the directional vector at the design point in U-space | B | the scaled second-order derivatives of at u* |
| φ(β) | the cumulative distribution function of the standard normal variable | Pf | the probability of failure |
| X | the vector representing the set of random variables xi | σiN | the equivalent normal standard deviation of random variable xi |
| Ut | the generator terminal voltage | UR | the output of the voltage regulator |
| Uref | the reference voltage | Ef | the excitation voltage |
| xad | the inductance coefficient of d-axis armature reaction | rf | the excitation winding resistance of the generator |
| Us | the output of the power system stabilizer | Uf | the output of the excitation system stabilizer |
| Tr | the time constant of the measure unit | L | the inductance |
| ψ | the magnetic flux | Lm | the mutual inductance |
| TL | the resistance torque of load | J | the rotational inertia |
| pn | the pole pairs | us, is, Rs | the voltage, current, resistance of stator |
| PWT | the power output of the wind turbine | Prated | the rated electrical power of the wind turbine |
| vci, vco | the cut-in and cut-off wind speed | vr | the rated wind speed |
| Iph | the photo current | I0 | the diode saturation current |
| R’s | the series resistance | R’p | the shunt/parallel resistance |
| Vt | the diode thermal voltage | PA, IA, VA | the power output, current, and voltage of the PV array |
| Simulation No. | Ke (p.u.) | Ki (s−1) | Reactive Power | Generator Terminal Voltage | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| tr (s) | ts (s) | p (p.u.) | tp (s) | tr (s) | ts (s) | p (p.u.) | tp (s) | Os (p.u.) | |||
| 1 | 6 | 0.55 | 0.00029 | 0.70835 | 7.50472 | 0.0063 | 0.05893 | 0.59551 | 226.588 | 0.24475 | 1.405 |
| 2 | 7 | 0.55 | 0.00017 | 0.83774 | 7.50482 | 0.0063 | 0.04869 | 1.15137 | 226.26 | 0.24475 | 1.99228 |
| 3 | 7 | 0.55 | 0.00017 | 0.83774 | 7.50482 | 0.0063 | 0.04869 | 1.15137 | 226.26 | 0.24475 | 1.99228 |
| 4 | 7 | 0.55 | 0.00017 | 0.83774 | 7.50482 | 0.0063 | 0.04869 | 1.15137 | 226.26 | 0.24475 | 1.99228 |
| 5 | 7 | 0.1 | 0.00016 | 0.83847 | 7.50482 | 0.0063 | 0.04869 | 1.15186 | 226.261 | 0.24475 | 1.99339 |
| 6 | 6 | 1 | 0.00029 | 0.70833 | 7.50472 | 0.0063 | 0.05892 | 0.59554 | 226.588 | 0.24475 | 1.40557 |
| 7 | 7 | 0.55 | 0.00017 | 0.83774 | 7.50482 | 0.0063 | 0.04869 | 1.15137 | 226.26 | 0.24475 | 1.99228 |
| 8 | 7 | 0.55 | 0.00017 | 0.83774 | 7.50482 | 0.0063 | 0.04869 | 1.15137 | 226.26 | 0.24475 | 1.99228 |
| 9 | 7 | 1 | 0.00016 | 0.83862 | 7.50482 | 0.0063 | 0.04869 | 1.1528 | 226.26 | 0.24475 | 1.99509 |
| 10 | 7 | 0.55 | 0.00017 | 0.83774 | 7.50482 | 0.0063 | 0.04869 | 1.15137 | 226.26 | 0.24475 | 1.99228 |
| 11 | 7 | 0.55 | 0.00017 | 0.83774 | 7.50482 | 0.0063 | 0.04869 | 1.15137 | 226.26 | 0.24475 | 1.99228 |
| 12 | 8 | 1 | 0.00007 | 1.39728 | 7.50489 | 0.0063 | 0.04716 | 1.9153 | 226.013 | 0.24475 | 2.47662 |
| 13 | 8 | 0.55 | 0.00007 | 1.39712 | 7.50489 | 0.0063 | 0.04716 | 1.91419 | 226.014 | 0.24475 | 2.47599 |
| 14 | 8 | 0.1 | 0.00007 | 1.37754 | 7.50489 | 0.0063 | 0.04717 | 1.9127 | 226.014 | 0.24475 | 2.47537 |
| 15 | 7 | 0.55 | 0.00017 | 0.83774 | 7.50482 | 0.0063 | 0.04869 | 1.15137 | 226.26 | 0.24475 | 1.99228 |
| 16 | 6 | 0.1 | 0.00029 | 0.70835 | 7.50472 | 0.0063 | 0.05893 | 0.5955 | 226.588 | 0.24475 | 1.40489 |
| Simulation No. | Ke (p.u.) | Ki (s−1) | Guide Vane Opening | Angular Velocity | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| tr (s) | ts (s) | p (p.u.) | tp (s) | Os (p.u.) | tr (s) ×10−5 | ts (s) | p (p.u.) | tp (s) | Os (p.u.) | |||
| 1 | 6 | 0.55 | 0.01837 | 1.15621 | 0.21895 | 0.22785 | 188.507 | 3.99 | 1.10165 | 1.05118 | 0.248 | 5.1204 |
| 2 | 7 | 0.55 | 0.01853 | 1.16495 | 0.21793 | 0.22795 | 185.165 | 3.32 | 0.98561 | 1.05078 | 0.2485 | 5.0801 |
| 3 | 7 | 0.55 | 0.01853 | 1.16495 | 0.21793 | 0.22795 | 185.165 | 3.32 | 0.98561 | 1.05078 | 0.2485 | 5.0801 |
| 4 | 7 | 0.55 | 0.01853 | 1.16495 | 0.21793 | 0.22795 | 185.165 | 3.32 | 0.98561 | 1.05078 | 0.2485 | 5.0801 |
| 5 | 7 | 0.1 | 0.01843 | 1.16483 | 0.2175 | 0.22795 | 187.636 | 3.41 | 0.98563 | 1.05077 | 0.2485 | 5.07975 |
| 6 | 6 | 1 | 0.01855 | 1.15657 | 0.21967 | 0.2279 | 184.326 | 3.95 | 1.10156 | 1.05118 | 0.248 | 5.12074 |
| 7 | 7 | 0.55 | 0.01853 | 1.16495 | 0.21793 | 0.22795 | 185.165 | 3.32 | 0.98561 | 1.05078 | 0.2485 | 5.0801 |
| 8 | 7 | 0.55 | 0.01853 | 1.16495 | 0.21793 | 0.22795 | 185.165 | 3.32 | 0.98561 | 1.05078 | 0.2485 | 5.0801 |
| 9 | 7 | 1 | 0.01863 | 1.16506 | 0.21836 | 0.24795 | 182.75 | 3.28 | 0.98559 | 1.05078 | 0.2485 | 5.08045 |
| 10 | 7 | 0.55 | 0.01853 | 1.16495 | 0.21793 | 0.22795 | 185.165 | 3.32 | 0.98561 | 1.05078 | 0.2485 | 5.0801 |
| 11 | 7 | 0.55 | 0.01853 | 1.16495 | 0.21793 | 0.22795 | 185.165 | 3.32 | 0.98561 | 1.05078 | 0.2485 | 5.0801 |
| 12 | 8 | 1 | 0.0187 | 1.17919 | 0.21736 | 0.228 | 181.57 | 3.28 | 0.98559 | 1.05047 | 0.2485 | 5.0493 |
| 13 | 8 | 0.55 | 0.01859 | 1.17913 | 0.21693 | 0.228 | 183.92 | 2.91 | 0.99159 | 1.05047 | 0.2485 | 5.0493 |
| 14 | 8 | 0.1 | 0.01849 | 1.17906 | 0.2165 | 0.228 | 186.321 | 2.93 | 0.99159 | 1.05047 | 0.2485 | 5.04902 |
| 15 | 7 | 0.55 | 0.01853 | 1.16495 | 0.21793 | 0.22795 | 185.165 | 3.32 | 0.98561 | 1.05078 | 0.2485 | 5.0801 |
| 16 | 6 | 0.1 | 0.01834 | 1.15613 | 0.21881 | 0.22785 | 189.362 | 4.00 | 1.10166 | 1.05118 | 0.248 | 5.12006 |
| Rise Time (tr) | Settling Time (ts) | Peak Value (p) | |||||||||
| No. | Parameter | Sensitivity Index | Ranking | No. | Parameter | Sensitivity Index | Ranking | No. | Parameter | Sensitivity Index | Ranking |
| 1 | T | 1.48% | 9 | 2 | Kp | 1.83% | 5 | 2 | Kp | 1.29% | 10 |
| 3 | bp | 1.51% | 7 | 5 | At | 4.85% | 3 | 5 | At | 5.44% | 2 |
| 4 | Kd | 1.51% | 8 | 12 | Tq00 | 22.29% | 2 | 8 | qnl | 2.07% | 5 |
| 6 | Dt | 2.72% | 4 | 13 | H | 33.70% | 1 | 11 | Td00 | 1.58% | 8 |
| 8 | qnl | 1.39% | 10 | 14 | F | 3.62% | 4 | 12 | Tq00 | 2.66% | 4 |
| 9 | T0 | 56.99% | 1 | 15 | Ka | 1.60% | 9 | 13 | H | 72.55% | 1 |
| 12 | Tq00 | 2.14% | 5 | 16 | Rs | 1.58% | 10 | 14 | F | 2.69% | 3 |
| 21 | H1 | 9.30% | 2 | 18 | Rr | 1.67% | 7 | 15 | Ka | 2.05% | 6 |
| 24 | Ncellm12 | 1.88% | 6 | 21 | H1 | 1.67% | 6 | 16 | Rs | 1.78% | 7 |
| 25 | Ir | 2.86% | 3 | 22 | F1 | 1.65% | 8 | 21 | H1 | 1.33% | 9 |
| Total | -- | 81.77% | -- | Total | -- | 74.45% | -- | Total | -- | 93.45% | -- |
| Peak time (pt) | Overshoot (Os) | Note | |||||||||
| No. | Parameter | Sensitivity index | Ranking | No. | Parameter | Sensitivity index | Ranking | Colour in cells: gradient change from green through yellow to red represents sensitivity from good to bad. | |||
| 1 | T | 1.44% | 7 | 4 | Kd | 1.49% | 7 | ||||
| 5 | At | 1.28% | 10 | 7 | fp | 1.44% | 8 | ||||
| 9 | T0 | 2.36% | 2 | 8 | qnl | 2.30% | 2 | Theses sensitivity indexes values of dynamic performance indexes are based on angular velocity. | |||
| 12 | Tq00 | 1.99% | 4 | 9 | T0 | 3.18% | 1 | ||||
| 13 | H | 71.59% | 1 | 13 | H | 1.33% | 10 | ||||
| 15 | Ka | 1.68% | 6 | 16 | Rs | 1.78% | 3 | ||||
| 16 | Rs | 1.42% | 8 | 20 | Lm | 1.66% | 4 | Physical meaning and definitions of these parameters see Table 3. | |||
| 17 | Lls | 1.84% | 5 | 21 | H1 | 1.55% | 6 | ||||
| 24 | Ncellm12 | 2.23% | 3 | 24 | Ncellm12 | 1.62% | 5 | The longer the blue data bar, the weaker the sensitivity of the parameter. | |||
| 25 | Ir | 1.32% | 9 | 25 | Ir | 1.42% | 9 | ||||
| Total | -- | 87.15% | -- | Total | -- | 17.76% | -- | ||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, B.; Zhang, J.; Egusquiza, M.; Zhang, J.; Chen, D.; Egusquiza, E. Exploring the Regulation Reliability of a Pumped Storage Power Plant in a Wind–Solar Hybrid Power Generation System. Water 2021, 13, 2548. https://doi.org/10.3390/w13182548
Xu B, Zhang J, Egusquiza M, Zhang J, Chen D, Egusquiza E. Exploring the Regulation Reliability of a Pumped Storage Power Plant in a Wind–Solar Hybrid Power Generation System. Water. 2021; 13(18):2548. https://doi.org/10.3390/w13182548
Chicago/Turabian StyleXu, Beibei, Jingjing Zhang, Mònica Egusquiza, Junzhi Zhang, Diyi Chen, and Eduard Egusquiza. 2021. "Exploring the Regulation Reliability of a Pumped Storage Power Plant in a Wind–Solar Hybrid Power Generation System" Water 13, no. 18: 2548. https://doi.org/10.3390/w13182548