
2D CFD Modeling of Rapid Water Filling with Air Valves Using OpenFOAM

 , , , , and
, , , , and
Abstract
:1. Introduction
2. Materials and Methods
2.1. Experimental Facility
2.2. 1D Mathematical Model
3. 2D CFD Model
3.1. Governing Equations
3.1.1. Continuity Equation
3.1.2. Conservation of Momentum Equation
3.1.3. Volume Fraction Transport Equation
3.1.4. Energy Conservation Equations
3.2. Numerical Solution with OpenFOAM
3.2.1. CFD Model Configuration
- The -axis corresponds to the longitudinal direction which matches the main direction of the flow. The computation domain extends from (−0.20 m) up to (3.60 m).
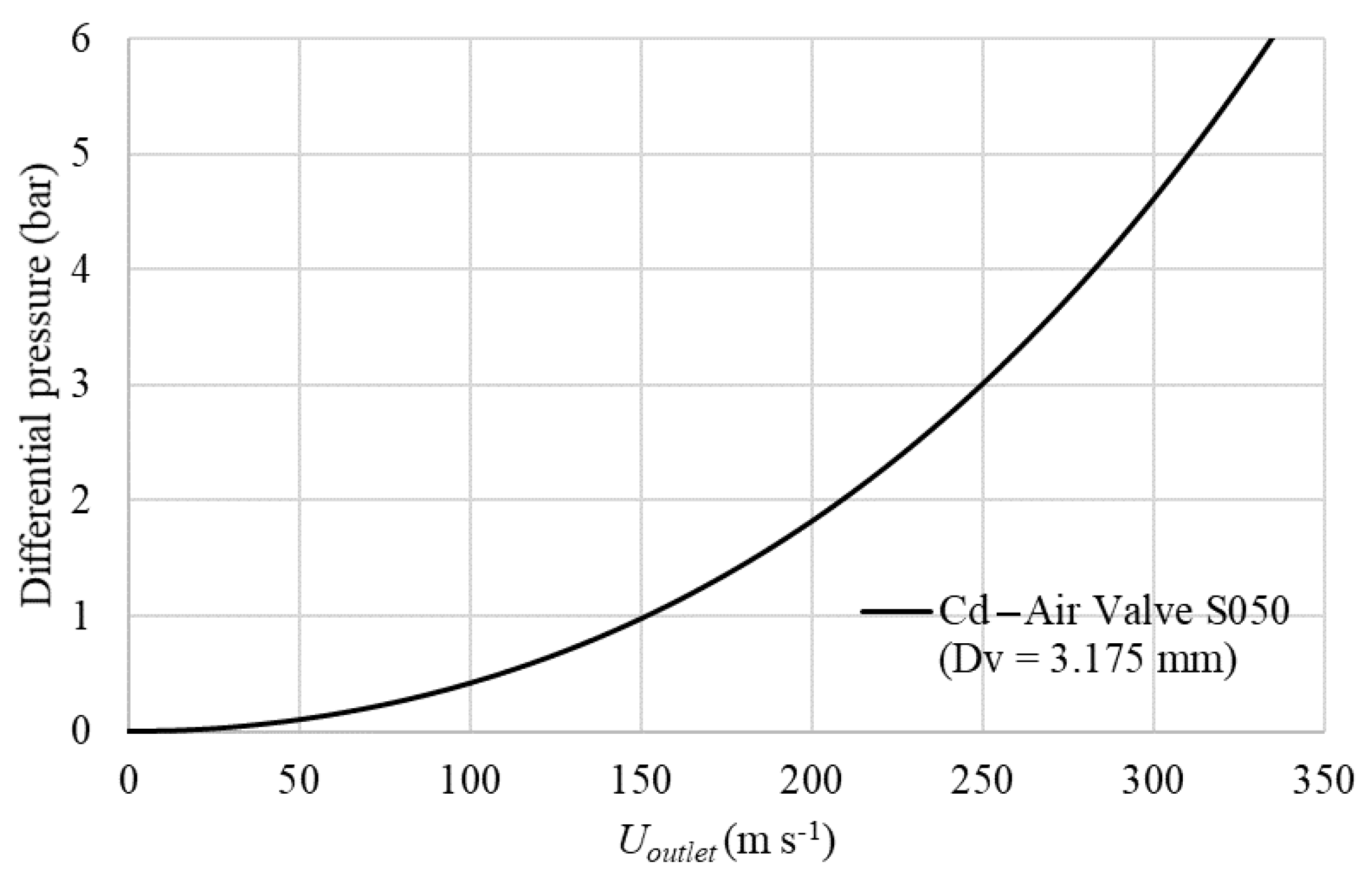
- On the -axis the installation diameter was considered, setting it to the 3.175 mm air valve diameter (S050 Model). This setup was created for a domain between (−0.0257) and (0.83 m).
- The coordinate system center of the domain was placed in the center of the electro-pneumatic valve.
- The model consists of 25 blocks composed by 31,532 cells, of which 31,404 are hexagonal and 128 are multifaceted polygonal cells.
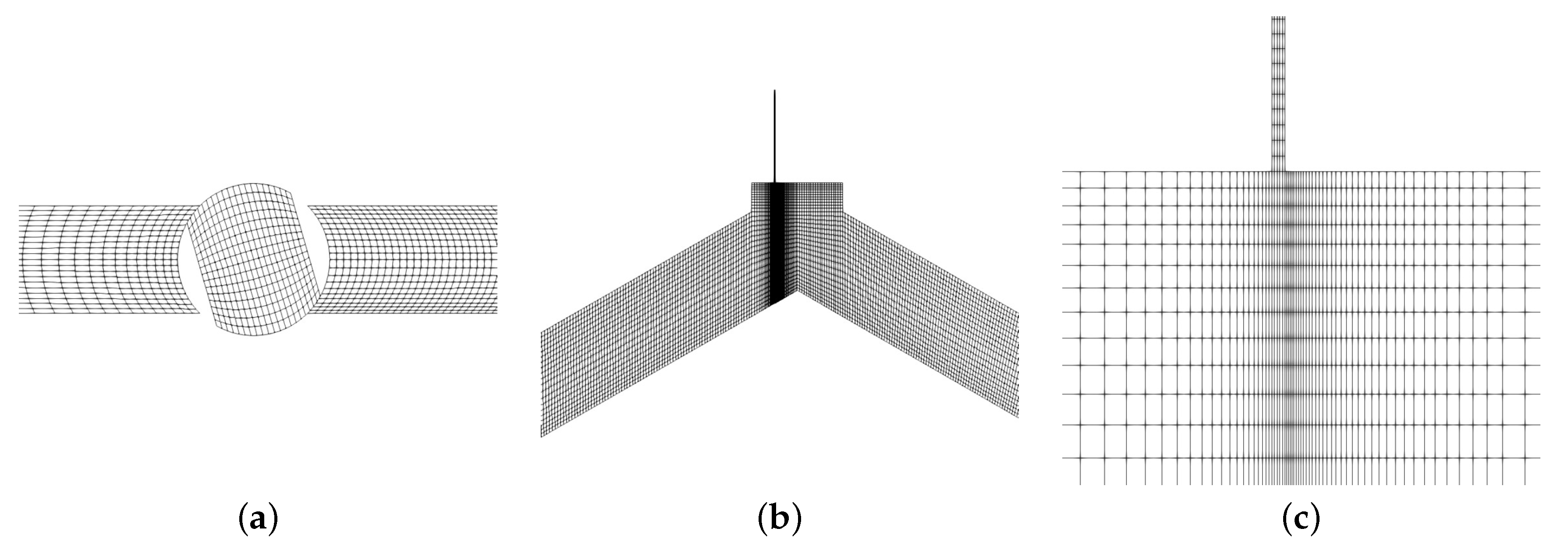
3.2.2. Geometry and Mesh
- A dynamic mesh representing the opening motion of the electro-pneumatic valve by a solid body motion function (Figure 3a,b). The opening phase of the electro-pneumatic valve occurs from time t = 0.0 s to a time t = 0.2 s. The valve rotation was represented by a tabulation of rotation versus time data.
3.2.3. Boundary Conditions
4. Results and Discussion
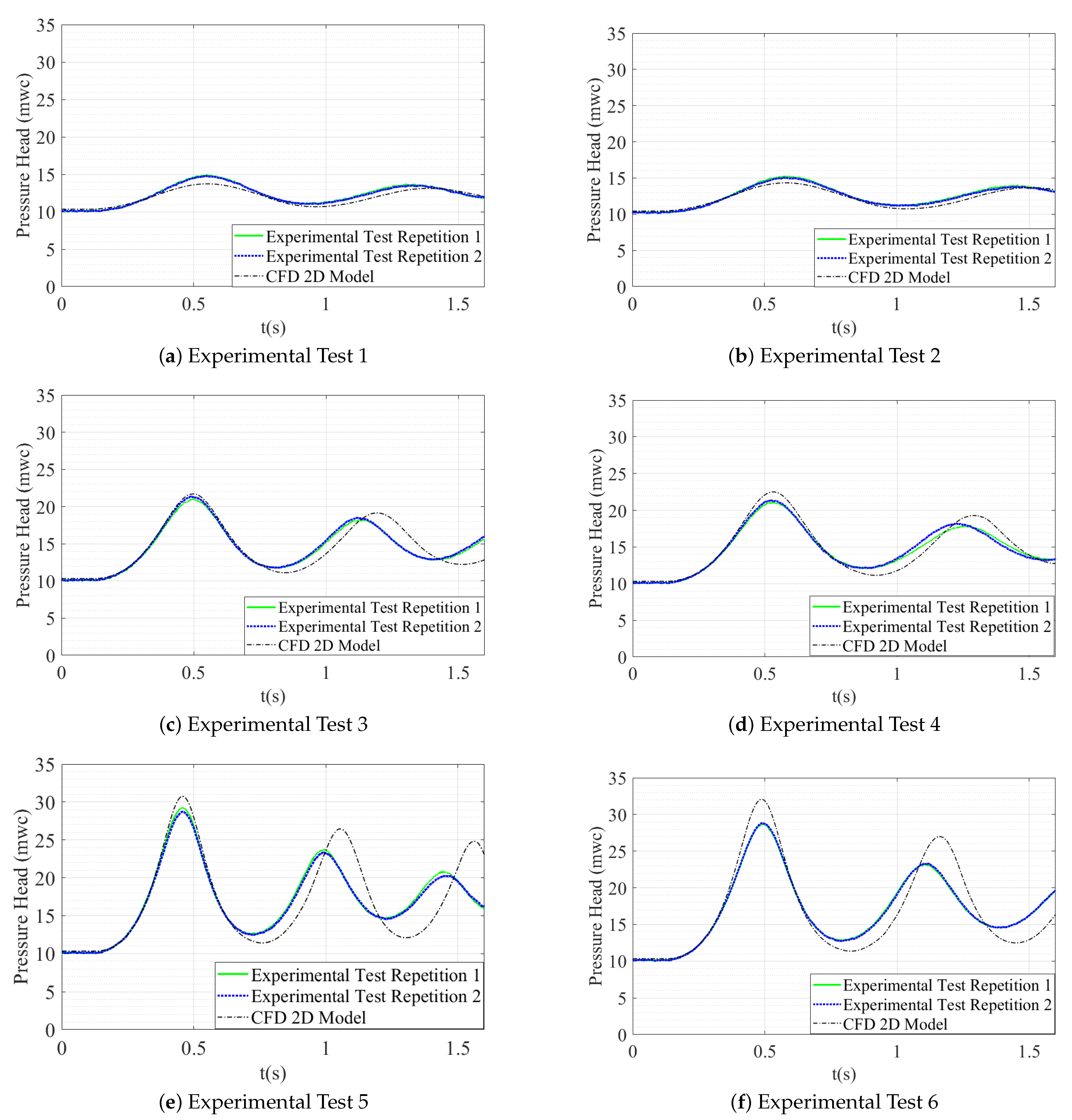
4.1. CFD Model Validation
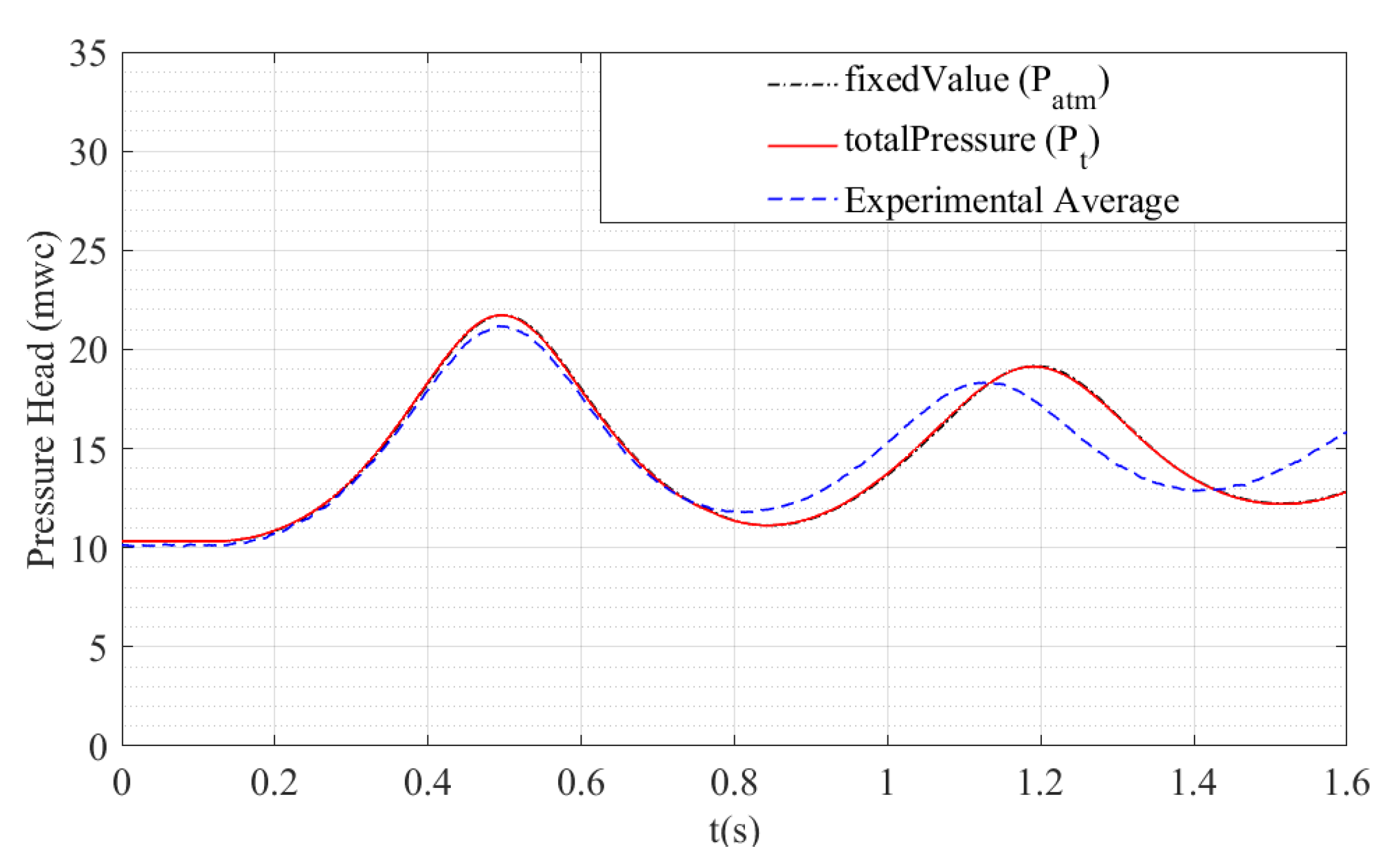
4.2. Influence of the Boundary Conditions
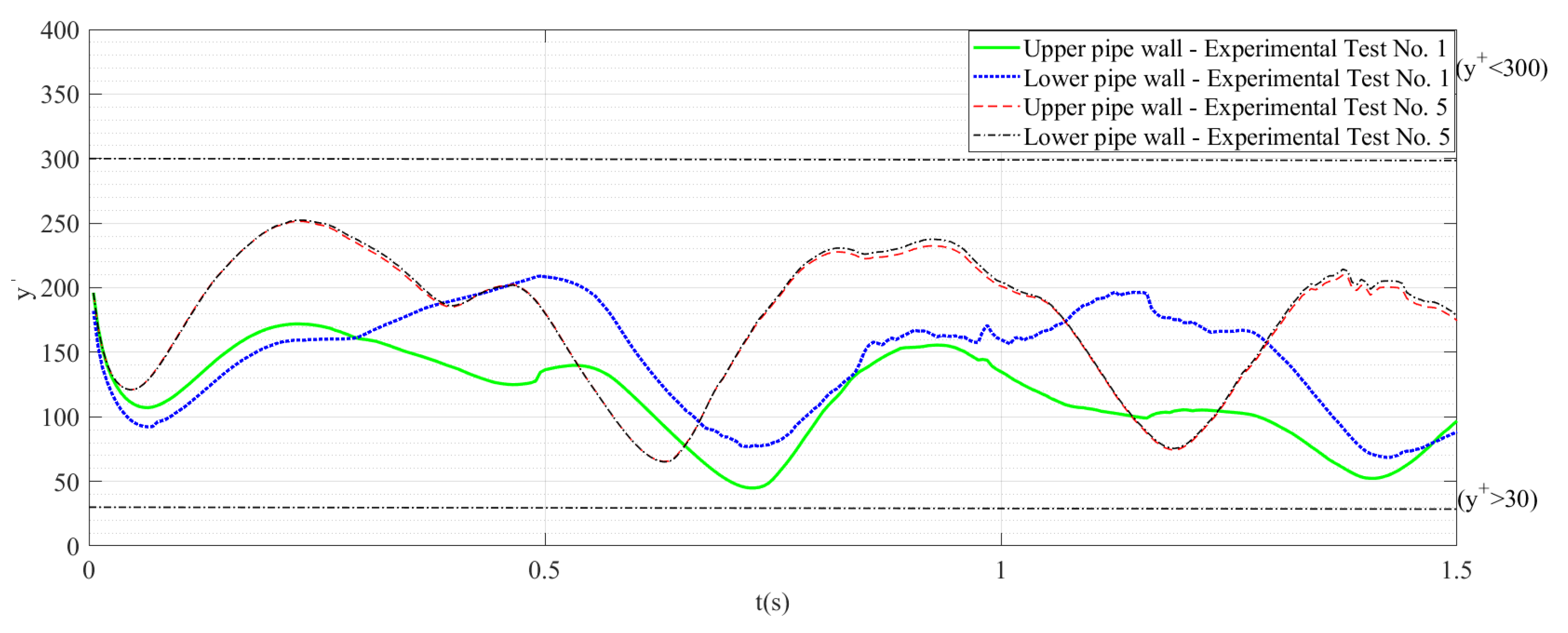
4.3. Near-Wall Flow Representation
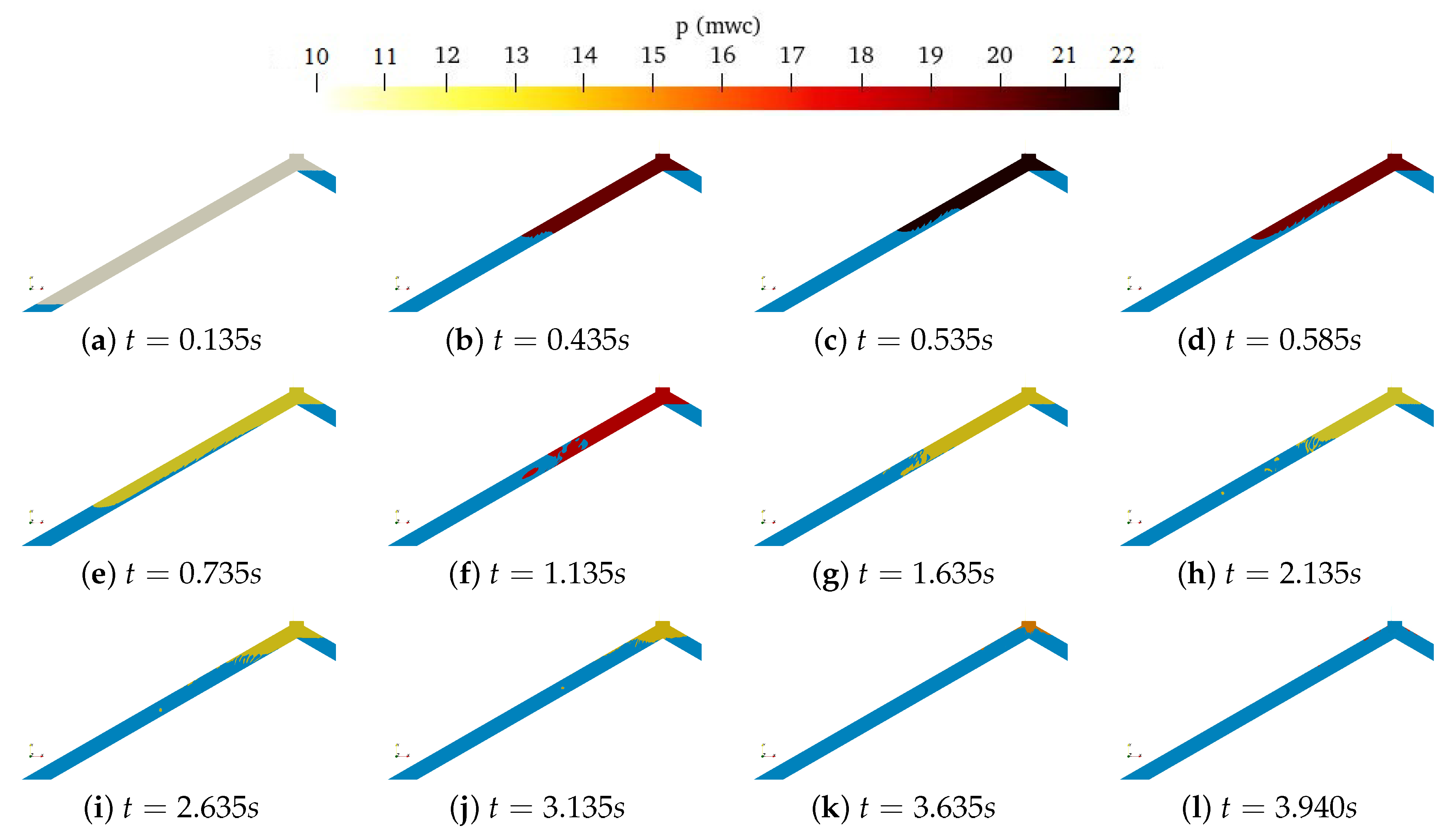
4.4. Air–Water Interface and Overpressure Analysis
5. Conclusions
- The results of the first overpressure peak were well adjusted to the experimental tests, presenting experimental errors between 0.71% and 9.10%, which represents a good results from the numerical point of the view.
- In contrast to the mathematical models, the CFD models adjust very well with the pressure patterns of the respective experimental tests, this is evidenced in the pressure patterns of the CFD models and the mathematical model, after the formation of the first overpressure peak in the different cases (Figure 5).
- If aspect-ratio is not used to guarantee the system equivalence between the outlet of the air valve and the 2D modeled pipeline, results will not necessarily match the experimental data.
- The use of wall functions for turbulent layer modeling reduces the computational effort, managing to correctly simulate the phenomenon.
- The values of must remain in the range recommended by previous studies, given that if the cell size increases, the elements of the domain will not properly display the volume changes in the air pocket by either simulating lower values, or even matching the experimental ones but with longer wavelengths. An excessive refinement may result in pressure values higher than experimental values.
- The mesh refinement has a small influence on the wavelength; nevertheless, refining the mesh achieves complexity for maintaining within the defined range, demanding an extreme refinement, and managing to keep the height of the first cell inside the viscous layer, which is considered to be an unnecessary effort due to the coherent results obtained using wall functions.
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| Notation |
| A = cross section (m2) |
| = discharge Coefficient of air valve S050 (-) |
| = specific heat at constant volume (m2 s−2 K−1) |
| D = diameter (m) |
| f = friction factor (-) |
| = volumetric representation of Surface tension (CSF method) |
| = gravitational acceleration vector (m s−2) |
| K = kinetic energy (kg m2 s−2) |
| = thermal conductivity (kg m s−3 K−1) |
| = water column length (m) |
| = outlet length (m) |
| p = pressure (kg m−1 s−2) |
| = total pressure (kg m−1 s−2) |
| = inlet pressure (kg m−1 s−2) |
| R = gas constant (kg m2 s−2 K−1 mol−1) |
| = friction coefficient of electro-pneumatic ball valve (m s2 m−6) |
| = aspect-ratio (-) |
| T = temperature (K) |
| t = time (s) |
| = outlet velocity (m s−1) |
| = velocity vector (m s−1) |
| v = velocity (mathematical model) (m s−1) |
| = initial air pocket length (m) |
| = non-dimensional wall distance (-) |
| = dynamic viscosity (m2 s−1) |
| = kinematic viscosity (kg m−1 s−1) |
| = Prandtl turbulent number (-) |
| = density (kg m−3) |
| Subscripts |
| a = Refers to the air phase (e.g., air density) |
| w = Refers to the water phase (e.g., dynamic water viscosity) |
| = Refers to the turbulence conditions (e.g., turbulent dynamic viscosity) |
| = Refers to the inlet and air pocket pressures |
| = Refers to the atmospheric conditions (e.g., atmospheric pressure) |
| p = Refers to the pipeline (e.g., pipe inner diameter) |
| v = Refers to the air valve (e.g., air valve cross section) |
References
- Fuertes-Miquel, V.S.; Coronado-Hernández, O.E.; Iglesias-Rey, P.L.; Mora-Meliá, D. Transient phenomena during the emptying process of a single pipe with water–air interaction. J. Hydraul. Res. 2019, 57, 318–326. [Google Scholar] [CrossRef]
- Fuertes-Miquel, V.S.; Coronado-Hernández, O.E.; Mora-Meliá, D.; Iglesias-Rey, P.L. Hydraulic modeling during filling and emptying processes in pressurized pipelines: A literature review. Urban Water J. 2019, 16, 299–311. [Google Scholar] [CrossRef]
- Hou, Q.; Tijsseling, A.S.; Laanearu, J.; Annus, I.; Koppel, T.; Bergant, A.; Vučković, S.; Anderson, A.; van’t Westende, J.M. Experimental investigation on rapid filling of a large-scale pipeline. J. Hydraul. Eng. 2014, 140, 04014053. [Google Scholar] [CrossRef] [Green Version]
- Malekpour, A.; Karney, B.; Nault, J. Physical understanding of sudden pressurization of pipe systems with entrapped air: Energy auditing approach. J. Hydraul. Eng. 2016, 142, 04015044. [Google Scholar] [CrossRef] [Green Version]
- Martins, N.M.; Delgado, J.N.; Ramos, H.M.; Covas, D.I. Maximum transient pressures in a rapidly filling pipeline with entrapped air using a CFD model. J. Hydraul. Res. 2017, 55, 506–519. [Google Scholar] [CrossRef]
- Zhou, L.; Liu, D.; Karney, B. Investigation of hydraulic transients of two entrapped air pockets in a water pipeline. J. Hydraul. Eng. 2013, 139, 949–959. [Google Scholar] [CrossRef]
- Fuertes, V. Hydraulic Transients with Entrapped Air Pockets. Ph.D. Thesis, Department of Hydraulic Engineering, Polytechnic University of Valencia, Valencia, Spain, 2001. Editorial Universitat Politècnica de València. [Google Scholar]
- Fuertes-Miquel, V.S.; López-Jiménez, P.A.; Martínez-Solano, F.J.; López-Patiño, G. Numerical modelling of pipelines with air pockets and air valves. Can. J. Civ. Eng. 2016, 43, 1052–1061. [Google Scholar] [CrossRef] [Green Version]
- Izquierdo, J.; Fuertes, V.; Cabrera, E.; Iglesias, P.; Garcia-Serra, J. Pipeline start-up with entrapped air. J. Hydraul. Res. 1999, 37, 579–590. [Google Scholar] [CrossRef]
- Liou, C.P.; Hunt, W.A. Filling of pipelines with undulating elevation profiles. J. Hydraul. Eng. 1996, 122, 534–539. [Google Scholar] [CrossRef]
- Liu, D.; Zhou, L.; Karney, B.; Zhang, Q.; Ou, C. Rigid-plug elastic-water model for transient pipe flow with entrapped air pocket. J. Hydraul. Res. 2011, 49, 799–803. [Google Scholar] [CrossRef]
- Zhou, L.; Pan, T.; Wang, H.; Liu, D.; Wang, P. Rapid air expulsion through an orifice in a vertical water pipe. J. Hydraul. Res. 2019, 57, 307–317. [Google Scholar] [CrossRef]
- Zhou, L.; Liu, D.; Karney, B.; Wang, P. Phenomenon of white mist in pipelines rapidly filling with water with entrapped air pockets. J. Hydraul. Eng. 2013, 139, 1041–1051. [Google Scholar] [CrossRef]
- Pozos-Estrada, O.; Fuentes, O.; Sánchez, A.; Rodal, E.; De Luna, F. Análisis de los efectos del aire atrapado en transitorios hidráulicos en acueductos a bombeo. Rev. Int. Métod. Numér. Para Cálculo Dise No Ing. 2017, 33, 79–89. [Google Scholar] [CrossRef] [Green Version]
- Romero, G.; Fuertes-Miquel, V.S.; Coronado-Hernández, Ó.E.; Ponz-Carcelén, R.; Biel-Sanchis, F. Analysis of hydraulic transients during pipeline filling processes with air valves in large-scale installations. Urban Water J. 2020, 17, 568–575. [Google Scholar] [CrossRef]
- Coronado-Hernández, Ó.E.; Besharat, M.; Fuertes-Miquel, V.S.; Ramos, H.M. Effect of a commercial air valve on the rapid filling of a single pipeline: A numerical and experimental analysis. Water 2019, 11, 1814. [Google Scholar] [CrossRef] [Green Version]
- Ahadzadeh, N.; Tabesh, M. Application of two-component pressure approach and harten–lax–van leer (hll) solver to model transient flow with regard to air entrapment. Water Sci. Technol. 2020, 81, 596–605. [Google Scholar] [CrossRef] [PubMed]
- Besharat, M.; Tarinejad, R.; Aalami, M.T.; Ramos, H.M. Study of a compressed air vessel for controlling the pressure surge in water networks: Cfd and experimental analysis. Water Resour. Manag. 2016, 30, 2687–2702. [Google Scholar] [CrossRef]
- Zhou, L.; Liu, D.-Y.; Ou, C.-Q. Simulation of flow transients in a water filling pipe containing entrapped air pocket with vof model. Eng. Appl. Comput. Fluid Mech. 2011, 5, 127–140. [Google Scholar] [CrossRef] [Green Version]
- Liu, D.; Zhou, L. Numerical simulation of transient flow in pressurized water pipeline with trapped air mass. In Proceedings of the 2009 Asia-Pacific Power and Energy Engineering Conference, Wuhan, China, 28–30 March 2009; pp. 1–4. [Google Scholar]
- Greenshields, C. OpenFOAM: The Open Source CFD Toolbox; OpenFOAM Foundation Ltd.: London, Uk, 2015. [Google Scholar]
- Hernandez-Perez, V.; Abdulkadir, M.; Azzopardi, B. Grid generation issues in the cfd modelling of two-phase flow in a pipe. J. Comput. Multiph. Flows 2011, 3, 13–26. [Google Scholar] [CrossRef]
- Salim, S.M.; Cheah, S. Wall y strategy for dealing with wall-bounded turbulent flows. In Proceedings of the International Multiconference of Engineers and Computer Scientists, Hong Kong, China, 18–20 March 2009; Volume 2, pp. 2165–2170. [Google Scholar]
- Wang, H.; Zhai, Z.J. Analyzing grid independency and numerical viscosity of computational fluid dynamics for indoor environment applications. Build. Environ. 2012, 52, 107–118. [Google Scholar] [CrossRef]
- Zhou, L.; Wang, H.; Karney, B.; Liu, D.; Wang, P.; Guo, S. Dynamic behavior of entrapped air pocket in a water filling pipeline. J. Hydraul. Eng. 2018, 144, 04018045. [Google Scholar] [CrossRef]
- Gersten, K. Hermann schlichting and the boundary-layer theory. In Hermann Schlichting—100 Years; Springer: Berlin/Heidelberg, Germany, 2009; pp. 3–17. [Google Scholar]
- Shukla, I.; Tupkari, S.; Raman, A.; Mullick, A. Wall y plus approach for dealing with turbulent flow through a constant area duct. AIP Conf. Proc. 2012, 1440, 144–153. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Experimental Test | (mwc) | (m) |
|---|---|---|
| 1 | 2.03 | 0.96 |
| 2 | 2.03 | 1.36 |
| 3 | 5.09 | 0.96 |
| 4 | 5.09 | 1.36 |
| 5 | 7.64 | 0.96 |
| 6 | 7.64 | 1.36 |
| Boundary | Description |
|---|---|
| Inlet | The inlet pressure provided by the hydro-pneumatic tank is known. ‘Inlet’ is assigned to the fixed-value boundary condition (Dirichlet BC) with 2.03 mwc, 5.09 mwc, or 7.64 mwc values. Conditions for the remaining required variables as inlet boundaries are calculated according to the pressure. |
| Outlet | The outlet pressure of the system is 101,325 Pa. The air velocity is calculated according to the resulting pressure at the mentioned 3.175 mm outlet slot of the air valve. |
| Top and Bottom wall | As these are walls, the zero-velocity condition is applied via no-slip condition. As for the k, , and variables, that are necessary for the turbulence modeling (RANS – k − SST), wall functions were assigned to ensure refining so that remains in the desired range of 30 to 300 [23]. |
| Experimental Test | Experimental Repetition | (mwc) | (mwc) | % Experimental Error |
|---|---|---|---|---|
| 1 | 1 | 15.10 | 13.73 | 9.10 |
| 1 | 2 | 14.98 | 13.73 | 8.38 |
| 2 | 1 | 15.24 | 14.33 | 5.95 |
| 2 | 2 | 15.04 | 14.33 | 4.72 |
| 3 | 1 | 21.30 | 21.45 | 0.71 |
| 3 | 2 | 21.65 | 21.45 | 0.91 |
| 4 | 1 | 21.35 | 22.24 | 4.18 |
| 4 | 2 | 21.65 | 22.24 | 2.72 |
| 5 | 1 | 29.65 | 30.20 | 1.98 |
| 5 | 2 | 29.08 | 30.20 | 3.84 |
| 6 | 1 | 29.05 | 31.65 | 8.91 |
| 6 | 2 | 29.18 | 31.65 | 8.43 |
| (mm) | (mwc) | % Experimental Error | |
|---|---|---|---|
| 0.30 | 0.0588 | 42.61 | 30.5 |
| 0.50 | 0.0981 | 30.77 | 3.76 |
| 0.70 | 0.1373 | 30.65 | 3.38 |
| 0.88 | 0.1726 | 30.60 | 3.38 |
| 0.90 | 0.1765 | 30.38 | 2.54 |
| 0.92 | 0.1804 | 30.35 | 2.44 |
| 0.95 | 0.1863 | 30.31 | 2.30 |
| 1.00 | 0.1961 | 30.36 | 2.44 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Aguirre-Mendoza, A.M.; Oyuela, S.; Espinoza-Román, H.G.; Coronado-Hernández, O.E.; Fuertes-Miquel, V.S.; Paternina-Verona, D.A. 2D CFD Modeling of Rapid Water Filling with Air Valves Using OpenFOAM. Water 2021, 13, 3104. https://doi.org/10.3390/w13213104
Aguirre-Mendoza AM, Oyuela S, Espinoza-Román HG, Coronado-Hernández OE, Fuertes-Miquel VS, Paternina-Verona DA. 2D CFD Modeling of Rapid Water Filling with Air Valves Using OpenFOAM. Water. 2021; 13(21):3104. https://doi.org/10.3390/w13213104
Chicago/Turabian StyleAguirre-Mendoza, Andres M., Sebastián Oyuela, Héctor G. Espinoza-Román, Oscar E. Coronado-Hernández, Vicente S. Fuertes-Miquel, and Duban A. Paternina-Verona. 2021. "2D CFD Modeling of Rapid Water Filling with Air Valves Using OpenFOAM" Water 13, no. 21: 3104. https://doi.org/10.3390/w13213104