
Improving GPR Imaging of the Buried Water Utility Infrastructure by Integrating the Multidimensional Nonlinear Data Decomposition Technique into the Edge Detection


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
2.1. Conventional Edge Detectors
2.1.1. Roberts Detector
2.1.2. Sobel Detector
2.1.3. Prewitt Detector
2.1.4. Canny Detector (Central Difference and Intermediate Difference)
2.1.5. Laplacian (Zero-Crossing) Detector
2.1.6. Laplacian of Gaussian Detector
2.2. MDEEMD Edge Detector
2.2.1. MDEEMD Filter
- (a)
- Vertical decomposition: Decompose each data string of D(t) by performing EEMD to generate i first-order IMFs, then collect IMFs of the same level from each data string to constitute a profile of that level. This step will yield i first-order IMF profiles of different levels and a residue profile , i.e.,for a regularized decomposition, the number of the first-order IMF profiles is regularized to i, then the residual profile is deleted or integrated into the last IMF profile.
- (b)
- Horizontal decomposition: Decompose each first-order IMF profile obtained in (a) horizontally and regularize to j second-order IMF profiles, i.e.,then second-order IMF profiles are obtained:Here, “second-order” indicates performing EEMD twice.
- (c)
- 2D combination of modes: Perform the comparable minimal scale combination principle, which combines the second-order IMF profiles having comparable minimal scales to yield a single 2D IMF profile representing the true feature of the data in that level, i.e.,
2.2.2. MDEEMD Data Reconstruction
3. Modeling and Field Data
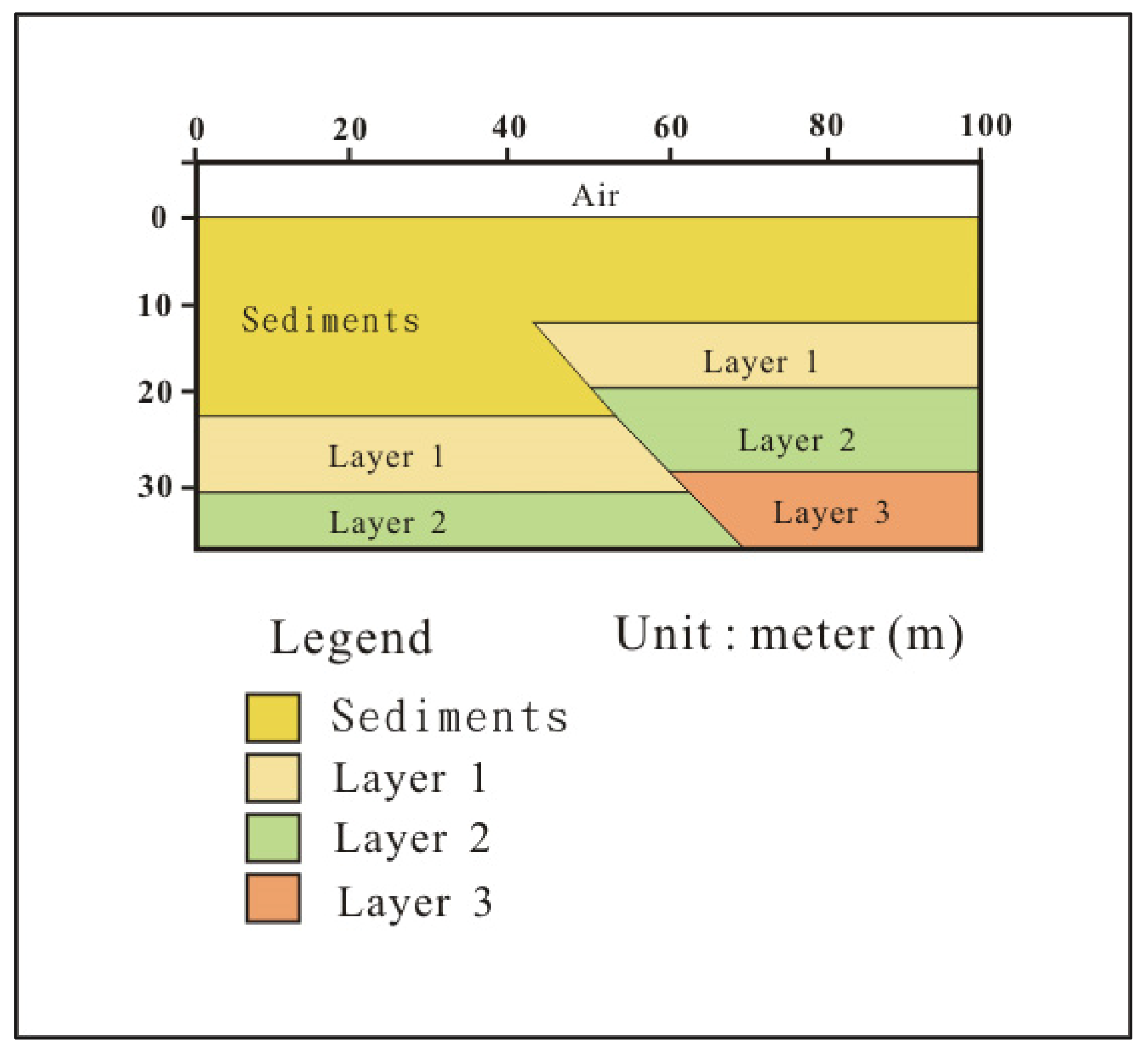
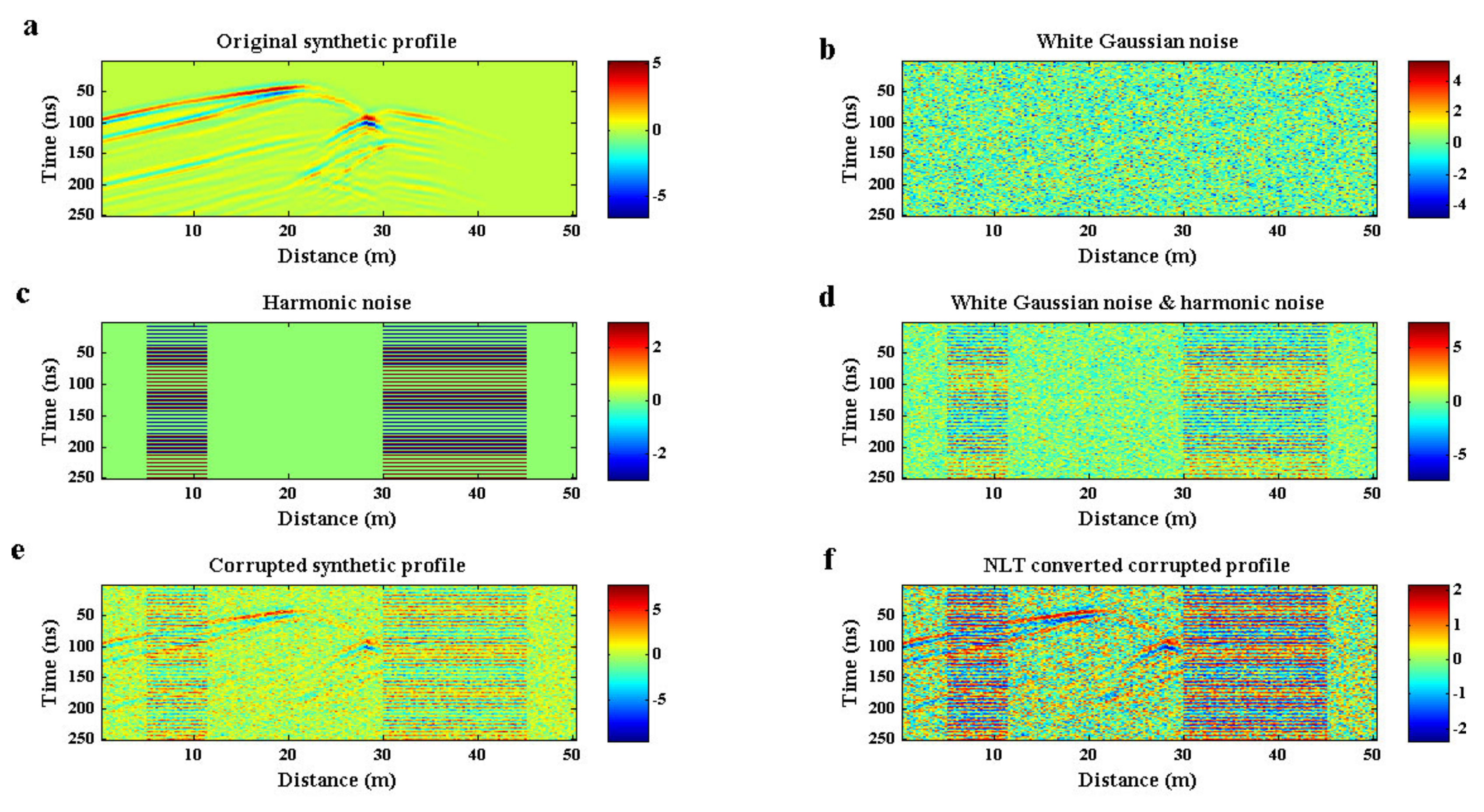
3.1. Hypothetical Model
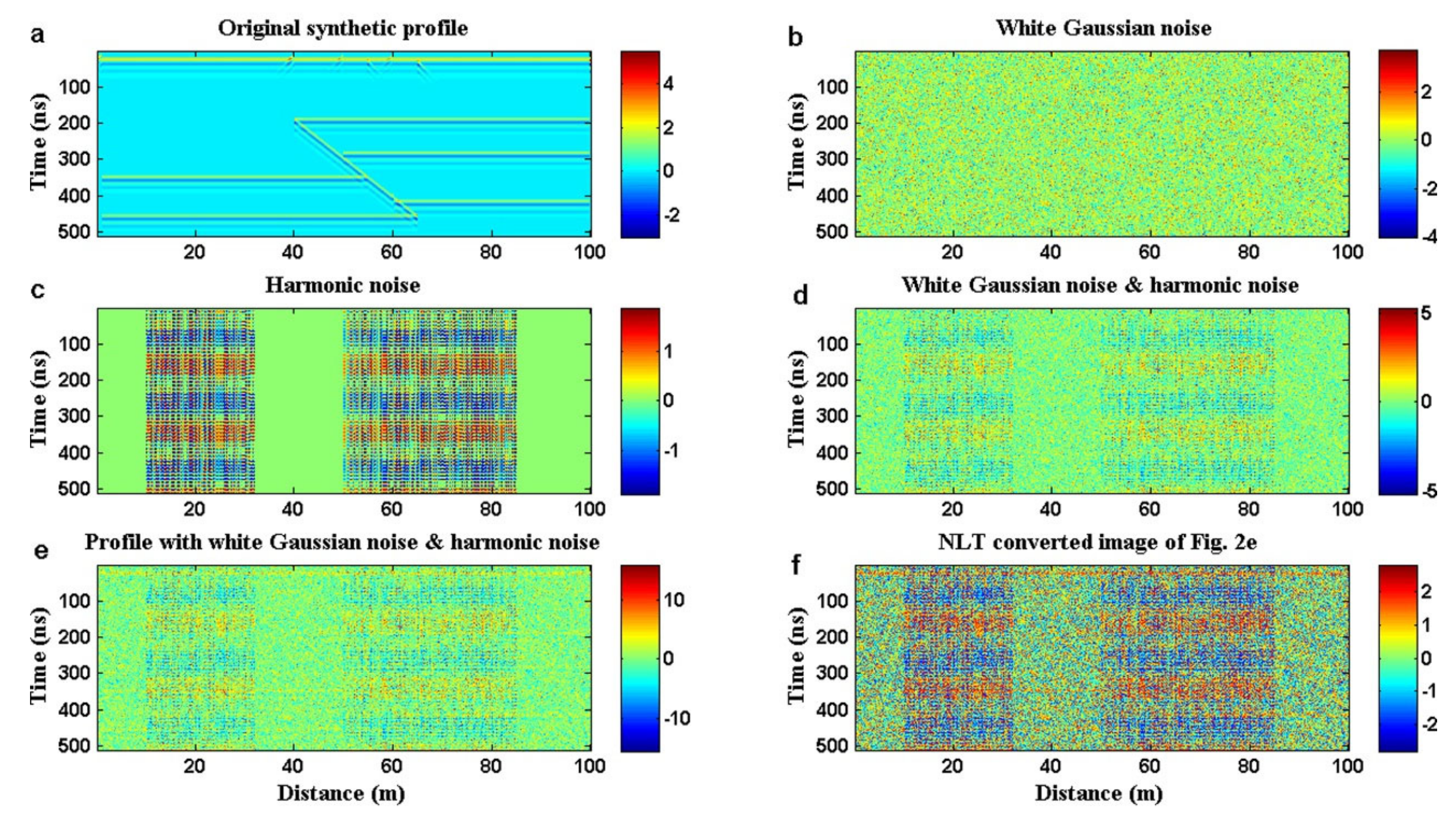
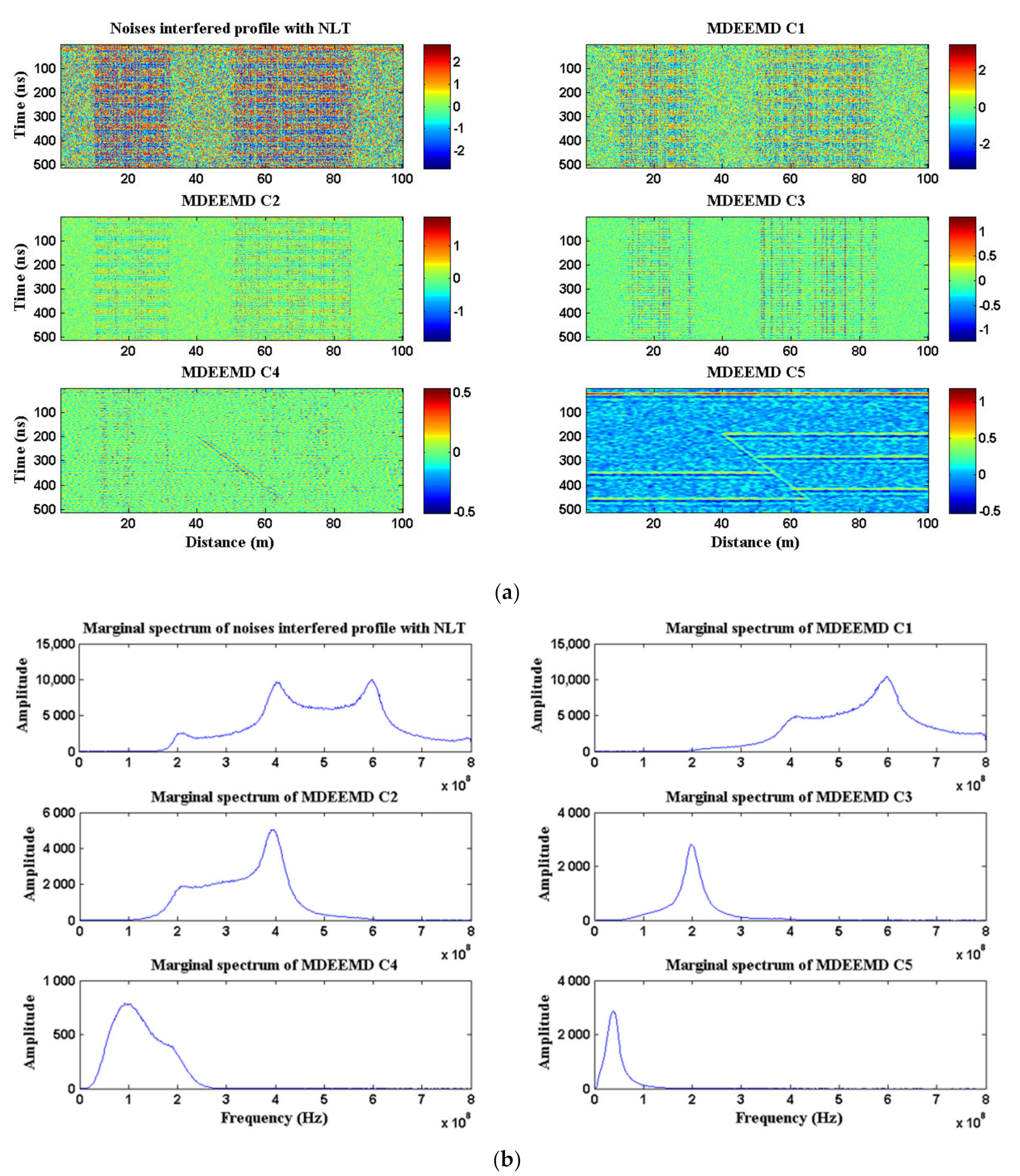
3.1.1. MDEEMD Processing
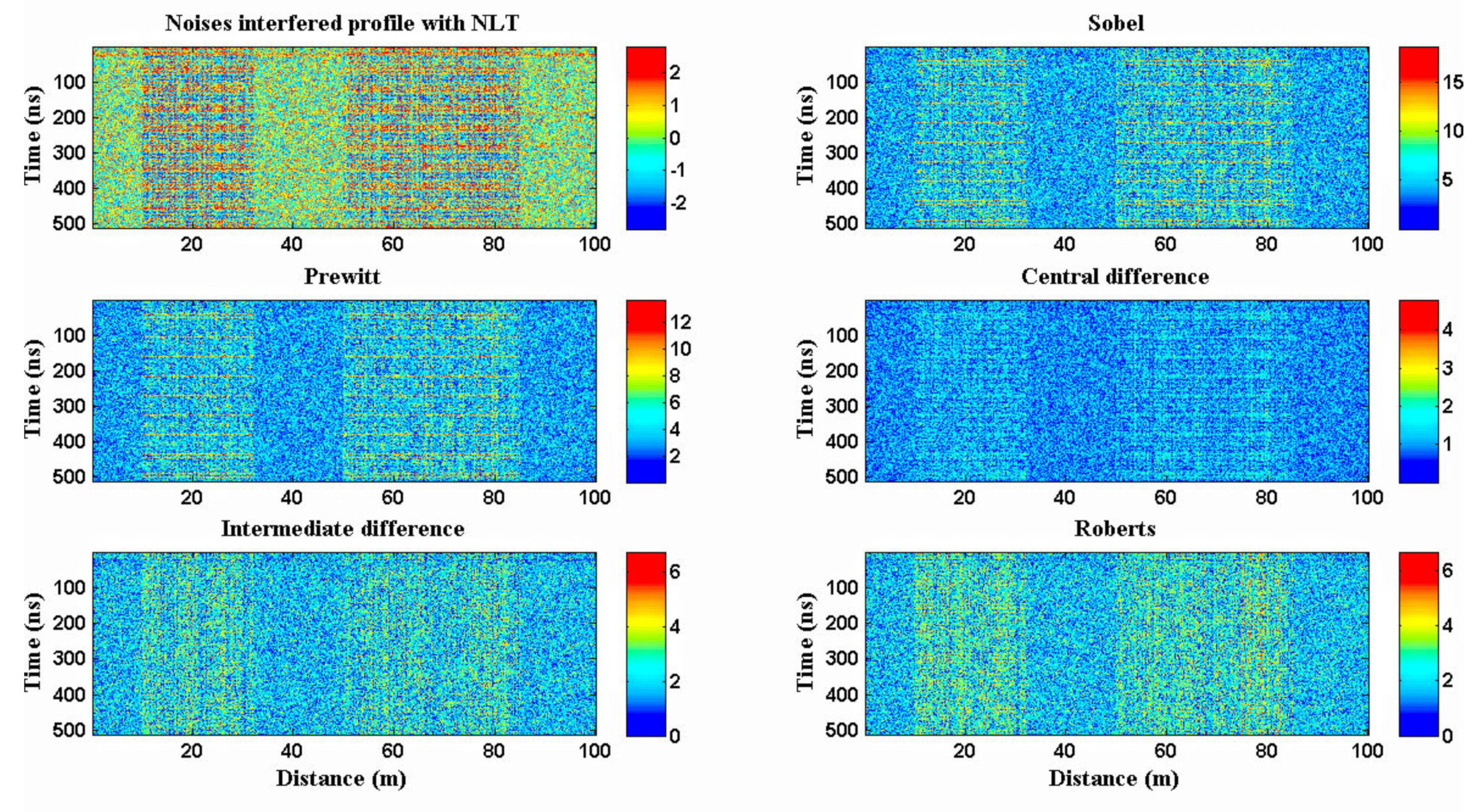
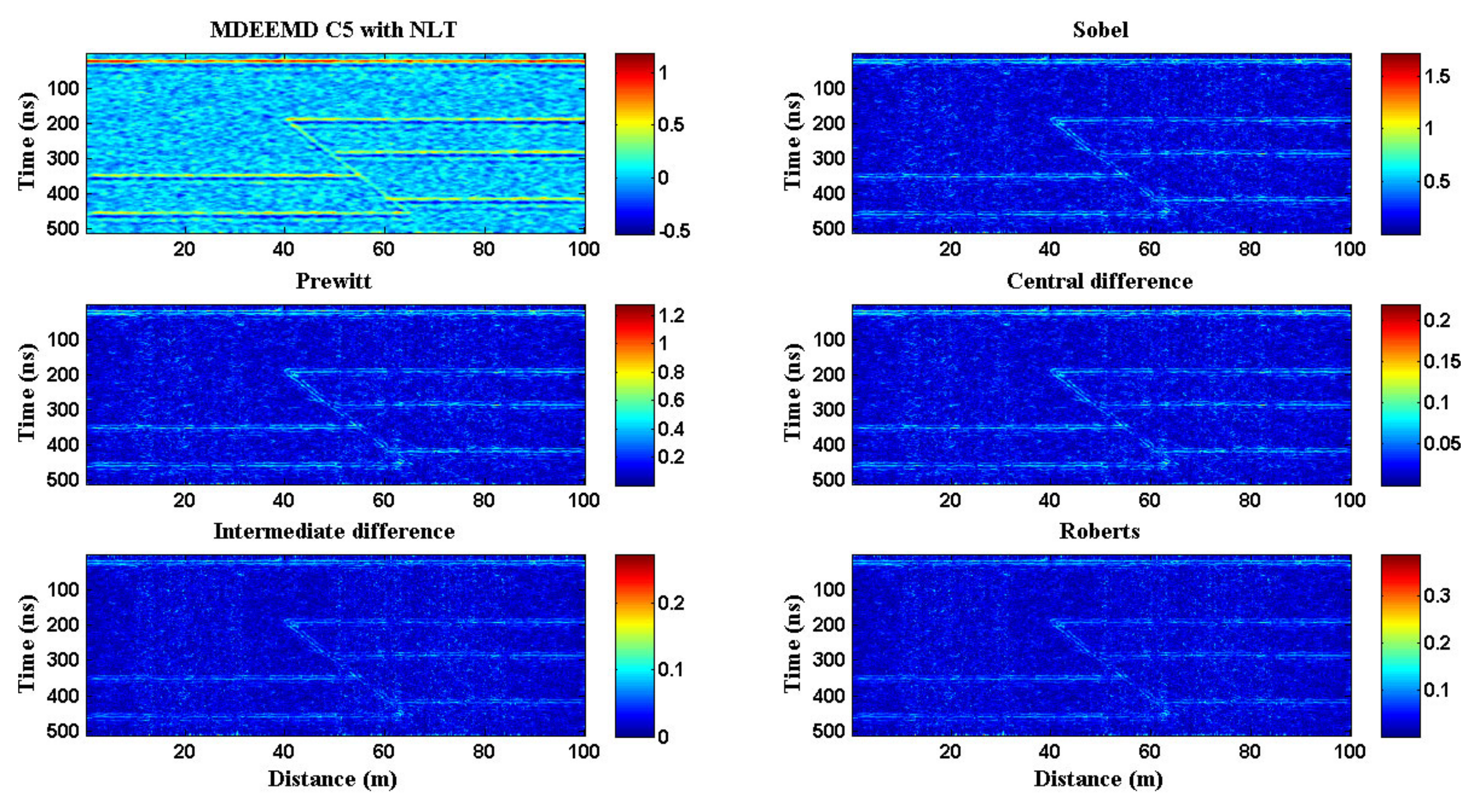
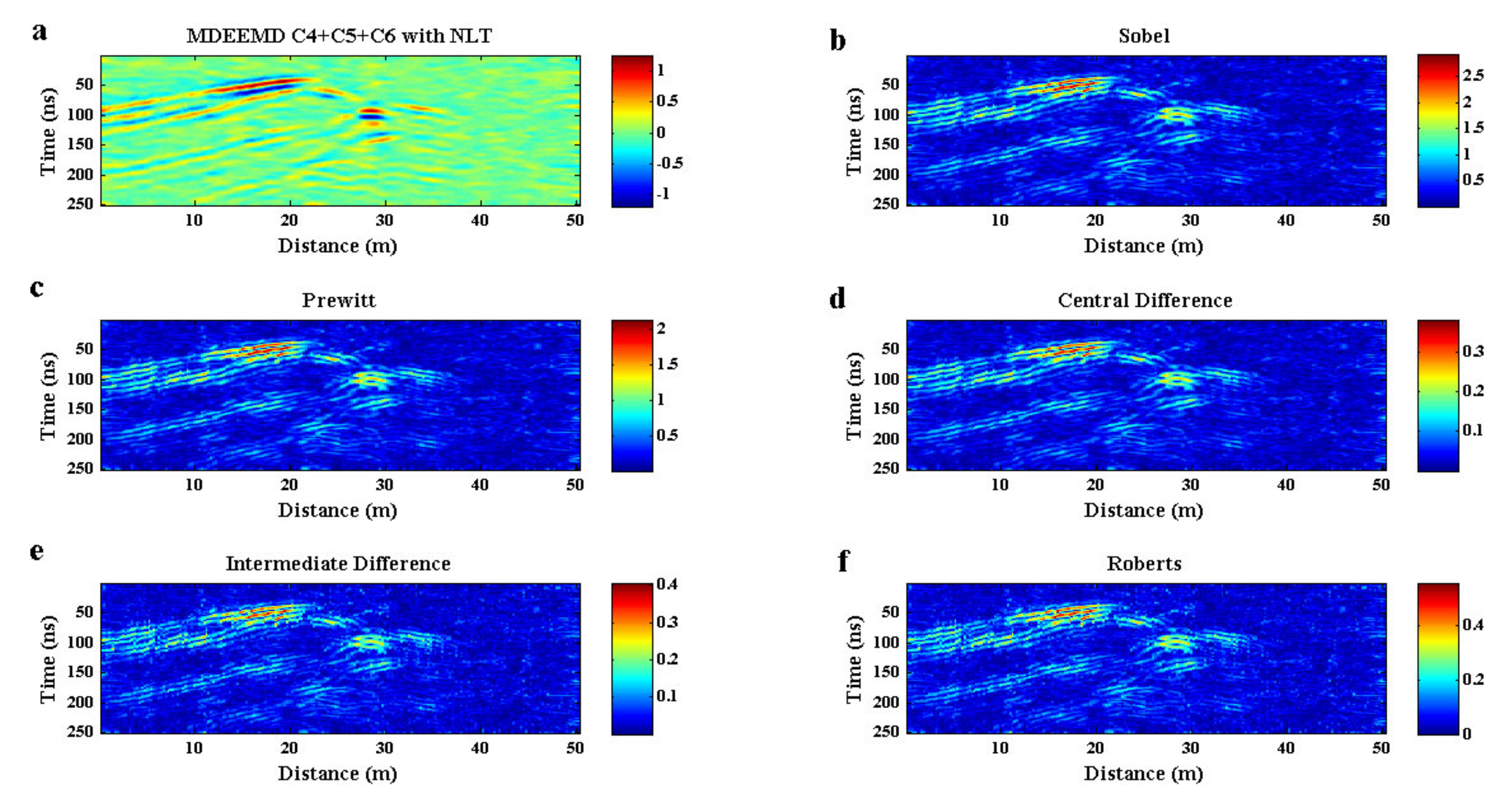
3.1.2. Edge Detecting
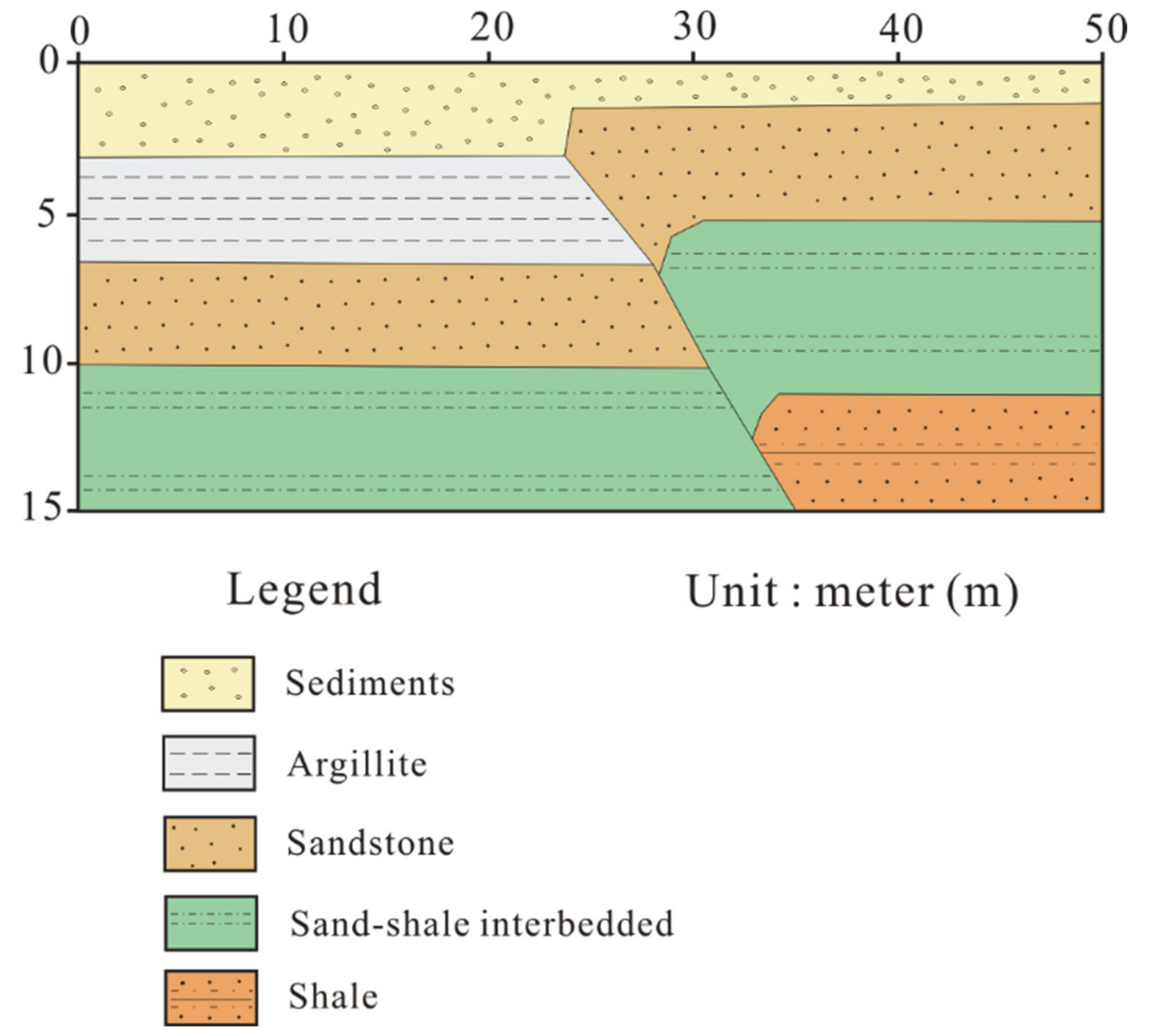
3.2. Realistic Model
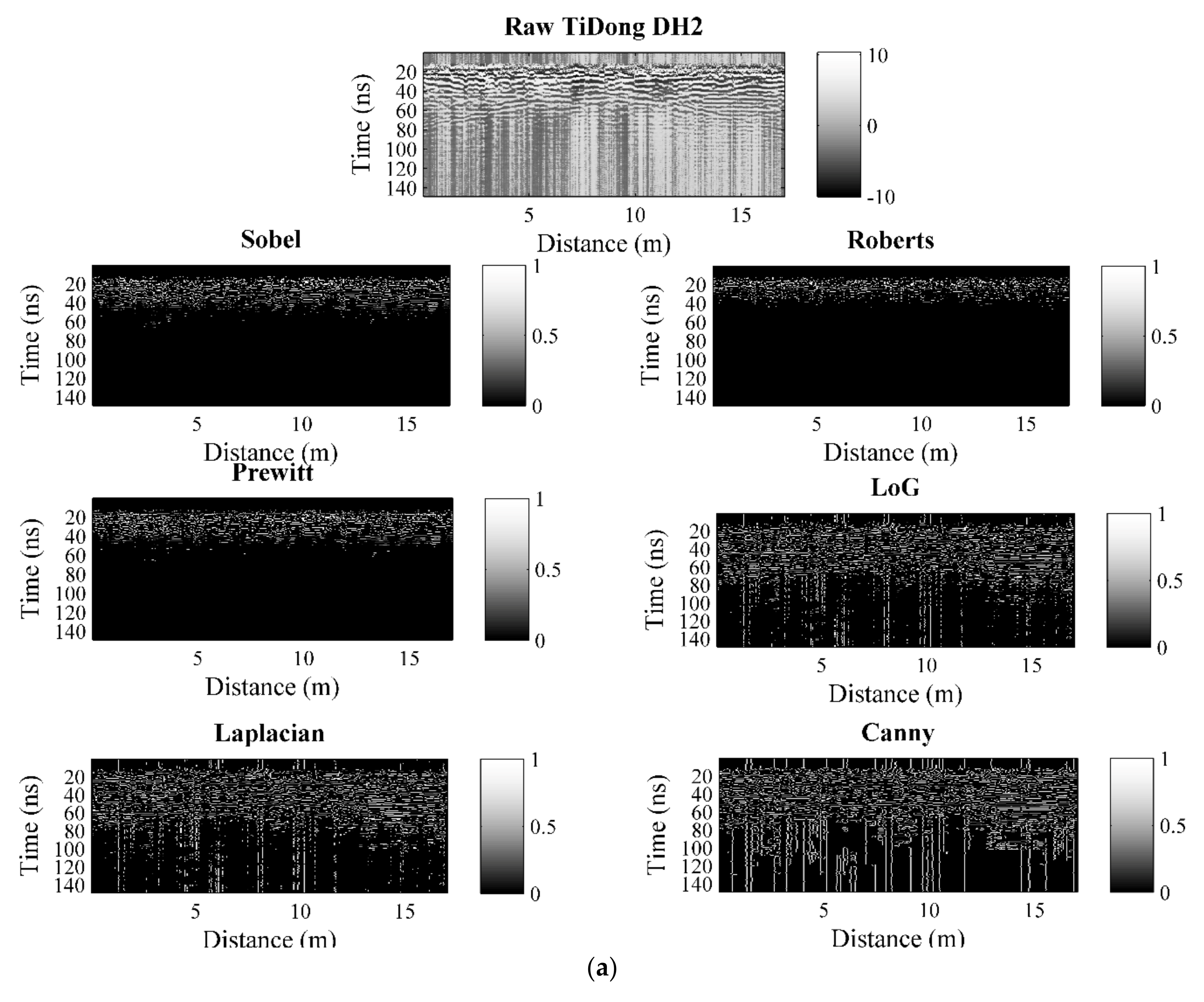
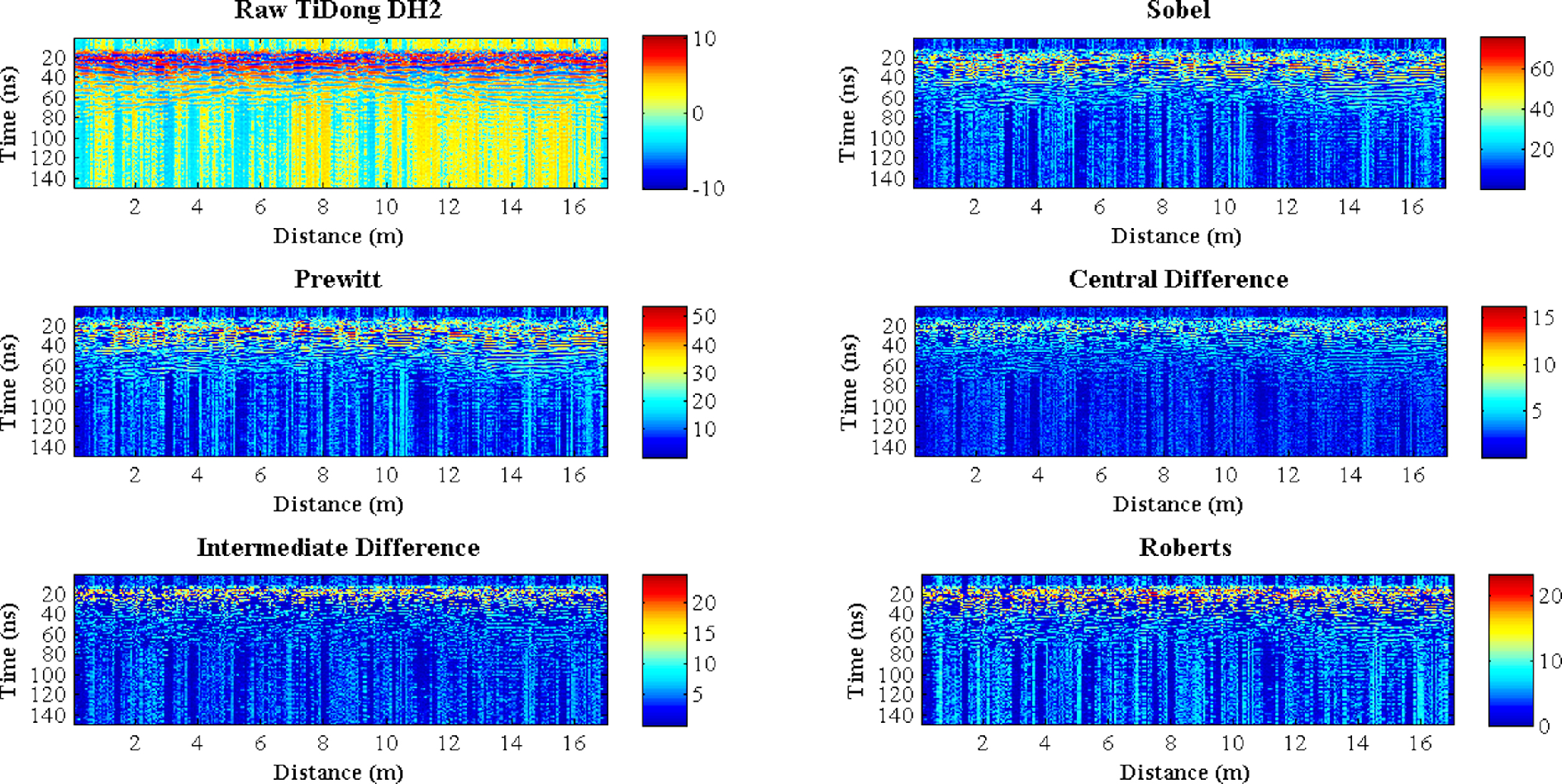
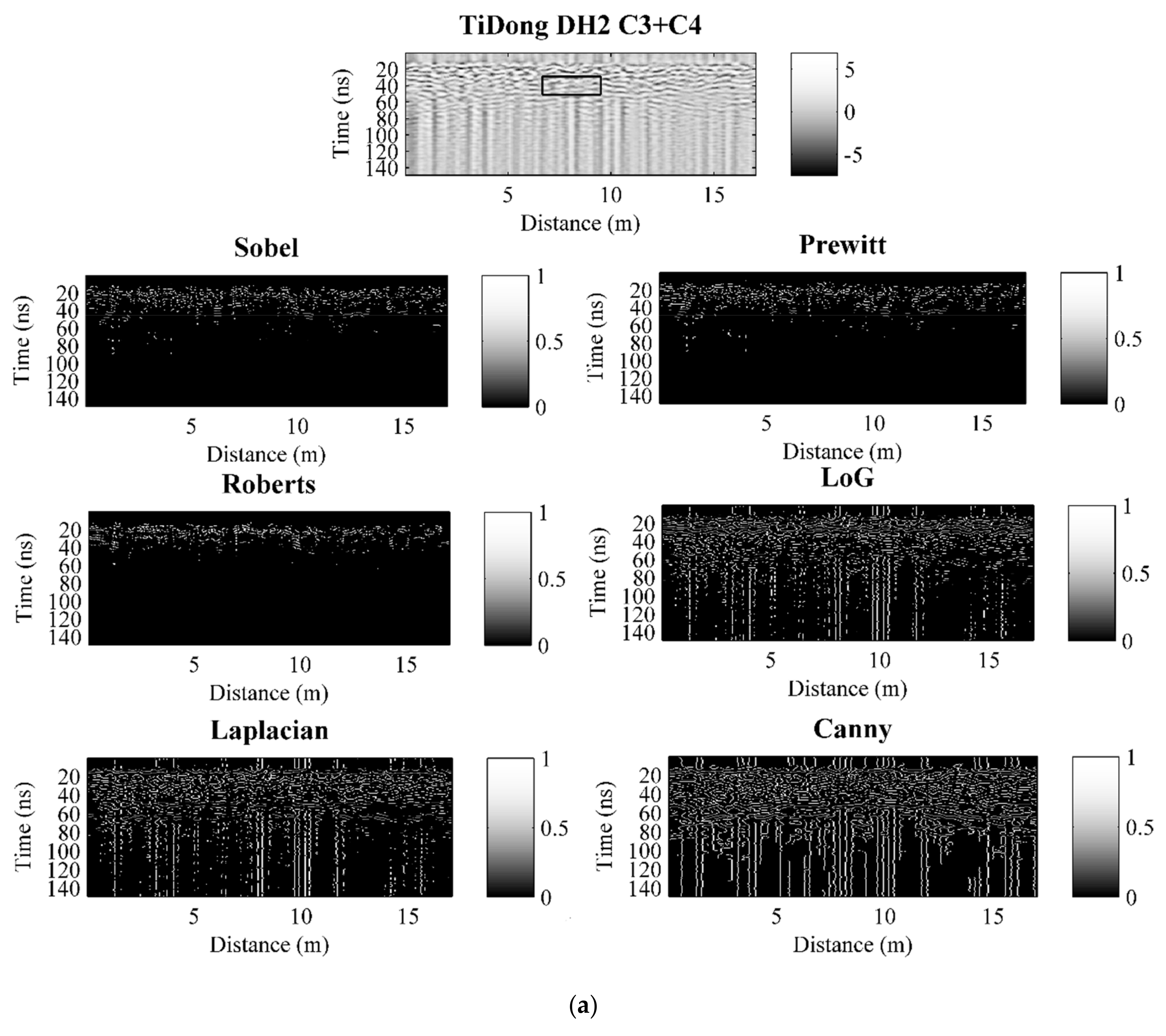
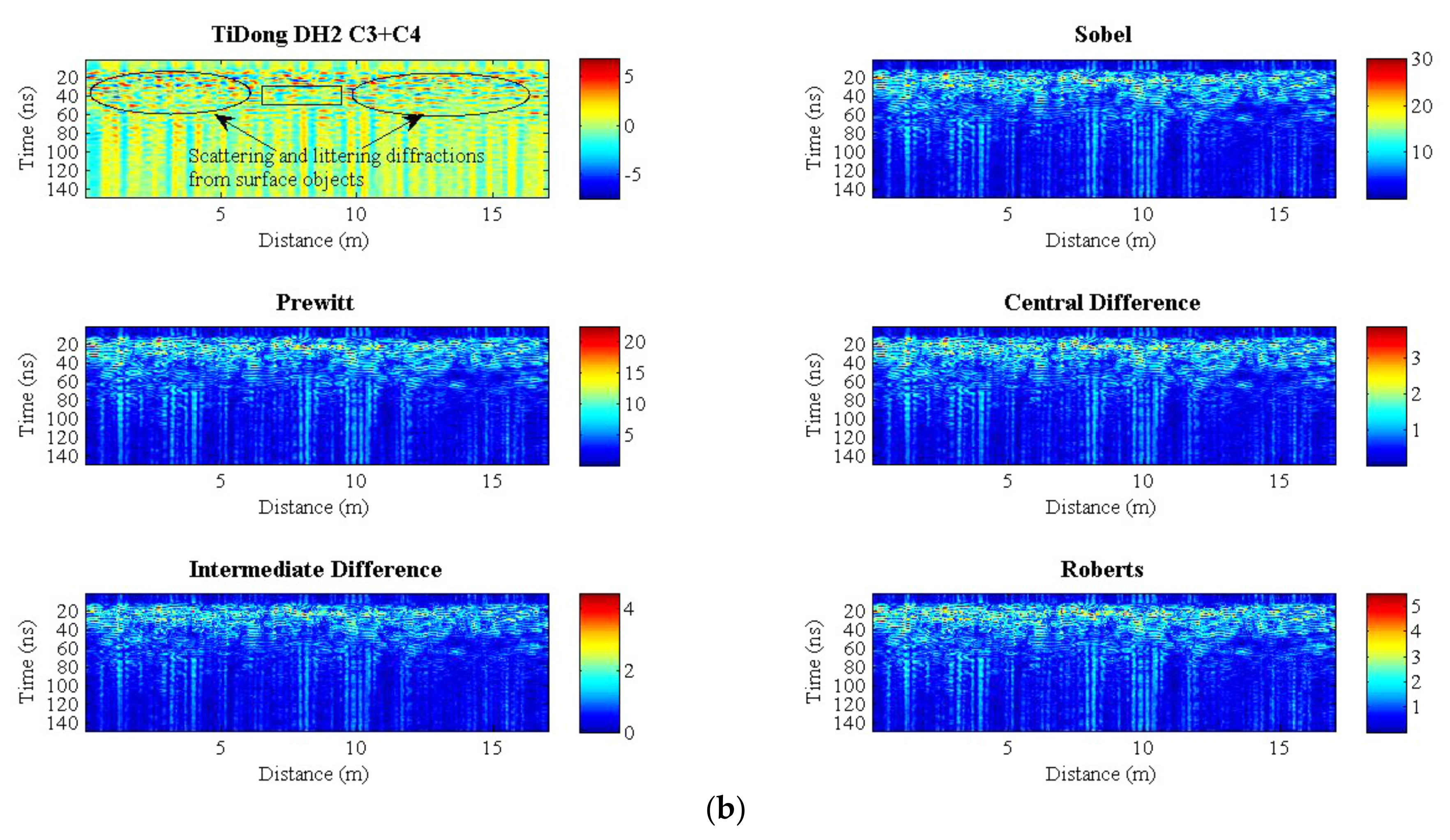
3.3. Field Data
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- Jaw, S.W.; Hashim, M. Locational accuracy of underground utility mapping using ground penetrating radar. Tunn. Undergr. Sp. Technol. 2013, 35, 20–29. [Google Scholar] [CrossRef]
- Bernatek-Jakiel, A.; Kondracka, M. Combining geomorphological mapping and near surface geophysics (GPR and ERT) to study piping systems. Geomorphology 2016, 274, 193–209. [Google Scholar] [CrossRef]
- Forte, E.; Pipan, M. Review of multi-offset GPR applications: Data acquisition, processing and analysis. Signal Process. 2017, 132, 210–220. [Google Scholar] [CrossRef]
- Lai, W.W.L.; Dérobert, X.; Annan, P. A review of Ground Penetrating Radar application in civil engineering: A 30-year journey from Locating and Testing to Imaging and Diagnosis. NDT E Int. 2018, 96, 58–78. [Google Scholar]
- Park, B.; Kim, J.; Lee, J.; Kang, M.-S.; An, Y.-K. Underground object classification for urban roads using instantaneous phase analysis of Ground-penetrating radar (GPR) data. Remote Sens. 2018, 10, 1417. [Google Scholar] [CrossRef] [Green Version]
- Got, J.B.; Bielders, C.; Lambot, S. Characterizing soil piping networks in loess-derived soils using ground-penetrating radar. In Geophysical Research Abstracts; EGU General Assembly: Vienna, Austria, 2019; p. 7038. [Google Scholar]
- Garcia-Lamont, F.; Cervantes, J.; López, A.; Rodriguez, L. Segmentation of images by color features: A survey. Neurocomputing 2018, 292, 1–27. [Google Scholar] [CrossRef]
- Yaacob, R.; Ooi, C.D.; Ibrahim, H.; Hassan, N.F.N.; Othman, P.J.; Hadi, H. Automatic extraction of two regions of creases from palm print images for biometric identification. J. Sens. 2019, 2019, 1–12. [Google Scholar] [CrossRef]
- Tariq, N.; Hamzah, R.A.; Ng, T.F.; Wang, S.L.; Ibrahim, H. Quality assessment methods to evaluate the performance of edge detection algorithms for digital image: A systematic literature review. IEEE Access 2021, 9, 87763–87776. [Google Scholar] [CrossRef]
- Davis, L.S. A survey of edge detection techniques. Comput. Graph. Image Process. 1975, 4, 248–270. [Google Scholar] [CrossRef]
- Nevatia, R. A color edge detector and its use in scene segmentation. IEEE Trans. Syst. Man. Cybern. 1977, 7, 820–826. [Google Scholar] [CrossRef]
- Nabighian, M.N. The analytic signal of two-dimensional magnetic bodies with polygonal cross-section: Its properties and use for automated anomaly interpretation. Geophysics 1972, 37, 507–517. [Google Scholar] [CrossRef]
- Roest, W.R.; Verhoef, J.; Pilkington, M. Magnetic interpretation using the 3-D analytic signal. Geophysics 1992, 57, 116–125. [Google Scholar] [CrossRef]
- Hsu, S.K.; Sibuet, J.C.; Shyu, C.T. High-resolution detection of geologic boundaries from potential-field anomalies: An enhanced analytic signal technique. Geophysics 1996, 61, 373–386. [Google Scholar] [CrossRef]
- Tabbagh, M.; Desvignes, A.; Dabas, G. Processing of Z gradiometer magnetic data using linear transforms and analytical signal. Archaeol. Prospect. 1997, 4, 1–13. [Google Scholar] [CrossRef]
- Jeng, Y.; Lee, Y.L.; Chen, C.Y.; Lin, M.J. Integrated signal enhancements in magnetic investigation in archaeology. J. Appl. Geophys. 2003, 53, 31–48. [Google Scholar] [CrossRef]
- Du, W.; Wu, Y.; Guan, Y.; Hao, M. Edge detection in potential filed using the correlation coefficients between the average and standard deviation of vertical derivatives. J. Appl. Geophys. 2017, 143, 231–238. [Google Scholar] [CrossRef]
- Cooper, G.R.J.; Cowan, D.R. Edge enhancement of potential-field data using normalized statistics. Geophysics 2008, 73, H1–H4. [Google Scholar] [CrossRef]
- Ma, G.; Li, L. Edge detection in potential fields with the normalized total horizontal derivative. Comput. Geosci. 2012, 41, 83–87. [Google Scholar] [CrossRef]
- Ma, G.; Liu, C.; Li, L. Balanced horizontal derivative of potential field data to recognize the edges and estimate location parameters of the source. J. Appl. Geophys. 2014, 108, 12–18. [Google Scholar] [CrossRef]
- Zhu, Y.; Wang, W.; Farquharson, C.; Huang, J.; Zhang, M.; Yang, M.; Wang, D. Normalized vertical derivatives in the edge enhancement of maximum-edge-recognition methods in potential fields. Geophysics 2021, 4, G23–G34. [Google Scholar] [CrossRef]
- Blakely, R.J.; Simpson, R.W. Approximating edges of source bodies from magnetic or gravity anomalies. Geophysics 1986, 51, 1494–1498. [Google Scholar] [CrossRef]
- Oruç, B.; Sertçelik, I.; Kafadar, Ö.; Selim, H.H. Structural interpretation of the Erzurum Basin, eastern Turkey, using curvature gravity gradient tensor and gravity inversion of basement relief. J. Appl. Geophys. 2013, 88, 105–113. [Google Scholar] [CrossRef]
- Chen, L.; Tsang, I.W.; Xu, D. Laplacian embedded regression for scalable manifold regularization. IEEE Trans. Neural Netw. Learn. Syst. 2012, 23, 902–915. [Google Scholar] [CrossRef]
- Shrivakshan, G.T.; Chandrasekar, C. A Comparison of various Edge Detection Techniques used in Image Processing. Int. J. Comput. Sci. 2012, 9, 269–276. [Google Scholar]
- Silva, P.M.; Martins, L.; Pampanelli, P.; Faustino, G. Why curvature attribute delineates subtle geologic features? A mathematical approach. Expanded Abstract. In Proceedings of the 86th SEG Annual Meeting, Dallas, TX, USA, 16 October 2016; pp. 1913–1918. [Google Scholar] [CrossRef]
- Miller, H.G.; Singh, V. Potential field tilt—a new concept for location of potential field sources. J. Appl. Geophys. 1994, 32, 213–217. [Google Scholar] [CrossRef]
- Aydin, T.; Yemez, Y.; Anarim, E.; Sankur, B. Multidirectional and multiscale edge detection via M-band wavelet transform. IEEE Trans. Image Process. 1996, 5, 1370–1377. [Google Scholar] [CrossRef]
- Boustani, B.; Javaherian, A.; Nabi-Bidhendi, M.; Torabi, S.; Amindavar, H.R. Mapping channel edges in seismic data using curvelet transform and morphological filter. J. Appl. Geophys. 2019, 160, 57–68. [Google Scholar] [CrossRef]
- Jeng, Y.; Lin, C.H.; Li, Y.W.; Chen, C.S.; Yu, H.M. Application of sub-image multiresolution analysis of Ground-penetrating radar data in a study of shallow structures. J. Appl. Geophys. 2011, 73, 251–260. [Google Scholar] [CrossRef]
- Turiel, A.; DelPozo, A. Reconstructing images from their most singular fractal manifold. IEEE Trans. Image Process. 2002, 11, 345–350. [Google Scholar] [CrossRef]
- Maji, S.K.; Yahia, H.M.; Badri, H. Reconstructing an image from its edge representation. Digit. Signal Process. 2013, 23, 1867–1876. [Google Scholar] [CrossRef] [Green Version]
- Wang, J.; Meng, X.; Li, F. Improved curvature gravity gradient tensor with principal component analysis and its application in edge detection of gravity data. J. Appl. Geophys. 2015, 118, 106–114. [Google Scholar] [CrossRef]
- Yuan, Y.; Huang, D.; Yu, Q.; Lu, P. Edge detection of potential field data with improved structure tensor methods. J. Appl. Geophys. 2014, 108, 35–42. [Google Scholar] [CrossRef]
- Ma, G.; Liu, C.; Huang, D. The removal of additional edges in the edge detection of potential field data. J. Appl. Geophys. 2015, 114, 168–173. [Google Scholar] [CrossRef]
- Pilkington, M.; Tschirhart, V. Practical considerations in the use of edge detectors for geologic mapping using magnetic data. Geophysics 2017, 82, J1–J8. [Google Scholar] [CrossRef]
- Cooper, G.R.J. The removal of unwanted edge contours from gravity datasets. Explor. Geophys. 2013, 44, 42–47. [Google Scholar] [CrossRef]
- Cooper, G.R.J. Reducing the dependence of the analytic signal amplitude of aeromagnetic data on the source vector direction. Geophysics 2014, 79, J55–J60. [Google Scholar] [CrossRef]
- Manzi, M.S.D.; Durrheim, R.J.; Hein, K.A.A.; King, N. 3D edge detection seismic attributes used to map potential conduits for water and methane in deep gold mines in the Witwatersrand basin. South Africa. Geophysics 2012, 77, WC133–WC147. [Google Scholar] [CrossRef]
- Ashraf, H.; Mousa, W.A.; AlDossary, S. Sobel filter for edge detection of hexagonally sampled 3D seismic data. Geophysics 2016, 81, N41–N51. [Google Scholar] [CrossRef]
- Zheng, J.; Peng, S.P.; Yang, F. A novel edge detection for buried target extraction after SVD-2D wavelet processing. J. Appl. Geophys. 2014, 106, 106–113. [Google Scholar] [CrossRef]
- Belina, F.A.; Dafflon, B.; Tronicke, J.; Holliger, K. Enhancing the vertical resolution of surface georadar data. J. Appl. Geophys. 2009, 68, 26–35. [Google Scholar] [CrossRef]
- Nielsen, L.; Møller, I.; H.Nielsen, L.; Johannessen, P.N.; Pejrup, M.; Andersen, T.J.; Korshøj, J.S. Integrating ground-penetrating radar and borehole data from a Wadden Sea barrier island. J. Appl. Geophys. 2009, 68, 47–59. [Google Scholar] [CrossRef]
- Tzanis, A. A versatile tuneable curvelet-like directional filter with application to fracture detection in two-dimensional GPR data. Signal Process. 2017, 132, 243–260. [Google Scholar] [CrossRef]
- Chen, C.S.; Jeng, Y. A data-driven multidimensional signal-noise decomposition approach for GPR data processing. Comput. Geosci. 2015, 85, 164–174. [Google Scholar] [CrossRef]
- Roberts, L.G. Machine Perception of Three-Dimensional Solids. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 1963. [Google Scholar]
- Sobel, G.; Feldman, I. A 3 × 3 Isotropic Gradient Operator for Image Processing. In Pattern Classification and Scene Analysis; Academic Press: New York, NY, USA, 1968. [Google Scholar]
- Prewitt, J. Object enhancement and extraction. In Picture Processing and Psychopictorics; Academic Press: New York, NY, USA, 1970. [Google Scholar]
- Canny, J. A Computational Approach to Edge Detection. IEEE Trans. Pattern Anal. Mach. Intell. 1986, 6, 679–698. [Google Scholar] [CrossRef]
- Green, B. Canny Edge Detection Tutorial. 2002. Available online: https://web.archive.org/web/20160324173252/http://dasl.mem.drexel.edu/alumni/bGreen/www.pages.drexel.edu/_weg22/can_tut.html (accessed on 25 July 2021).
- Accame, M.; DeNatale, F.G.B. Edge detection by point classification of Canny filtered images. Signal Processing 1997, 60, 11–22. [Google Scholar] [CrossRef]
- Marr, D. Vision: A Computational Investigation into the Human Representation and Processing of Visual Information; W. H. Freeman and Company: San Francisco, CA, USA, 1982; pp. 54–78. [Google Scholar]
- Lindeberg, T. Scale-Space Theory in Computer Vision; Springer: Berlin/Heidelberg, Germany, 1994. [Google Scholar]
- Ma, G.; Huang, D.; Meng, L. Improved structure tensor in the edge detection of potential field data. WIT Trans. Ecol. Environ. 2014, 189, 563–569. [Google Scholar] [CrossRef]
- Huang, N.E.; Shen, Z.; Long, S.R.; Wu, M.C.; Snin, H.H.; Zheng, Q.; Yen, N.C.; Tung, C.C.; Liu, H.H. The empirical mode decomposition and the Hubert spectrum for nonlinear and non-stationary time series analysis. Proc. R. Soc. A Math. Phys. Eng. Sci. 1998, 454, 903–995. [Google Scholar] [CrossRef]
- Chen, C.S.; Jeng, Y. Two-dimensional nonlinear geophysical data filtering using the multidimensional EEMD method. J. Appl. Geophys. 2014, 111, 256–270. [Google Scholar] [CrossRef] [Green Version]
- Wu, Z.H.; Huang, N.E.; Chen, X.Y. The multi-dimensional ensemble empirical mode decomposition method. Adv. Adapt. Data Anal. 2009, 1, 339–372. [Google Scholar] [CrossRef]
- Tzanis, A. Detection and extraction of orientation-and-scale-dependent information from two-dimensional GPR data with tuneable directional wavelet filters. J. Appl. Geophys. 2013, 8, 48–67. [Google Scholar] [CrossRef]
- Chen, C.S.; Jeng, Y. GPR investigation of the near-surface geology in a geothermal river valley using contemporary data decomposition techniques with forward simulation modeling. Geothermics 2016, 64, 439–454. [Google Scholar] [CrossRef]
- Huang, N.E.; Wu, Z. a Review on Hilbert-Huang Transform: Method and Its Applications. Rev. Geophys. 2008, 46, 1–23. [Google Scholar] [CrossRef] [Green Version]
- Flandrin, P.; Rilling, G.; Goncalves, P. Empirical mode decomposition as a filter bank. IEEE Signal Process. Lett. 2004, 11, 112–114. [Google Scholar] [CrossRef] [Green Version]
- Wu, Z.H.; Huang, N.E. Ensemble empirical mode decomposition: A noise-assisted data analysis method. Adv. Adapt. Data Anal. 2009, 1, 1–41. [Google Scholar] [CrossRef]
- Huang, N.E.; Shen, Z.; Long, S.R. A new view of nonlinear water waves: The Hilbert spectrum. Annu. Rev. Fluid Mech. 1999, 31, 417–457. [Google Scholar] [CrossRef] [Green Version]
- Lozano, M.; Fiz, J.A.; Jané, R. Performance evaluation of the Hilbert-Huang transform for respiratory sound analysis and its application to continuous adventitious sound characterization. Signal Process. 2016, 120, 99–116. [Google Scholar] [CrossRef] [Green Version]
- Stollnitz, E.J.; DeRose, T.D.; Salestin, D.H. Wavelets for computer graphics: A primer. Part 1. IEEE Comput. Graph. Appl. 1995, 15, 76–84. [Google Scholar] [CrossRef]
- Tzanis, A. The Curvelet Transform in the analysis of 2-D GPR data: Signal enhancement and extraction of orientation-and-scale-dependent information. J. Appl. Geophys. 2015, 115, 145–170. [Google Scholar] [CrossRef]
- Liu, Y.; Fomel, S. Seismic data interpolation beyond aliasing using regularized nonstationary autoregression. Geophysics. 2011, 76, V69–V77. [Google Scholar] [CrossRef]
- Hauser, S.; Ma, J. Seismic Data Reconstruction via Shearlet-Regularized Directional Inpainting. Available online: http://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.572.1557&rep=rep1&type=pdf (accessed on 30 August 2021).
- Looney, D.; Mandic, D.P. Multiscale Image Fusion Using Complex Extensions of EMD. IEEE Trans. Signal Process. 2009, 57, 1626–1630. [Google Scholar] [CrossRef]
- Jeng, Y.; Lin, M.J.; Chen, C.S.; Wang, Y.H. Using a Nonlinear Decomposition Method. Geophysics 2007, 72, F223–F235. [Google Scholar] [CrossRef]
- Chen, C.S.; Chien, T.S.; Lee, P.L.; Jeng, Y.; Yeh, T.K. Prefrontal Brain Electrical Activity and Cognitive Load Analysis Using a Non-linear and Non-Stationary Approach. IEEE Access 2020, 8, 211115–211124. [Google Scholar] [CrossRef]
- Chen, C.S.; Jeng, Y. Natural logarithm transformed EEMD instantaneous attributes of reflection data. J. Appl. Geophys. 2013, 95, 53–65. [Google Scholar] [CrossRef]
- Jeng, Y.; Chen, C.S. A nonlinear method of removing harmonic noise in geophysical data. Nonlinear. Process. Geophys. 2011, 18, 367–379. [Google Scholar] [CrossRef] [Green Version]
- Radzevicius, S.J.; Guy, E.D.; Daniels, J.J. Pitfalls in GPR data interpretation: Differentiating stratigraphy and buried objects from periodic antenna and target effects. Geophys. Res. Lett. 2000, 27, 3393–3396. [Google Scholar] [CrossRef] [Green Version]
- Jeng, Y.; Chen, C.S. Subsurface GPR imaging of a potential collapse area in urban environments. Eng. Geol. 2012, 147–148. [Google Scholar] [CrossRef]
- Sun, J.; Young, R.A. Recognizing surface scattering in ground-penetrating radar data. Geophysics 1995, 60, 1378–1385. [Google Scholar] [CrossRef]
- Bano, M.; Marquis, G.; Nivière, B.; Maurin, J.C.; Cushing, M. Investigating alluvial and tectonic features with ground penetrating radar and analyzing diffractions patterns. J. Appl. Geophys. 2000, 43, 33–41. [Google Scholar] [CrossRef]
- Jeng, Y.; Chen, C.S.; Chen, S.C. Multidimensional EMD-based edge detection and the application to GPR imaging. In Proceedings of the EGU General Assembly Conference Abstracts, Vienna, Austria, 23–28 April 2017; p. 1982. [Google Scholar]
- Lindeberg, T. Edge detection and ridge detection with automatic scale selection. In Proceedings of the CVPR IEEE Computer Society Conference on Computer Vision and Pattern Recognition, San Francisco, CA, USA, 18–20 June 1996; pp. 465–470. [Google Scholar] [CrossRef] [Green Version]
- Plataniotis, K.N.; Venetsanopoulos, A.N. Color Image Processing and Applications; Springer: Berlin/Heidelberg, Germany, 2000. [Google Scholar] [CrossRef]


















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, C.-S.; Jeng, Y. Improving GPR Imaging of the Buried Water Utility Infrastructure by Integrating the Multidimensional Nonlinear Data Decomposition Technique into the Edge Detection. Water 2021, 13, 3148. https://doi.org/10.3390/w13213148
Chen C-S, Jeng Y. Improving GPR Imaging of the Buried Water Utility Infrastructure by Integrating the Multidimensional Nonlinear Data Decomposition Technique into the Edge Detection. Water. 2021; 13(21):3148. https://doi.org/10.3390/w13213148
Chicago/Turabian StyleChen, Chih-Sung, and Yih Jeng. 2021. "Improving GPR Imaging of the Buried Water Utility Infrastructure by Integrating the Multidimensional Nonlinear Data Decomposition Technique into the Edge Detection" Water 13, no. 21: 3148. https://doi.org/10.3390/w13213148