
Object-Based Multigrained Cascade Forest Method for Wetland Classification Using Sentinel-2 and Radarsat-2 Imagery

Abstract
:1. Introduction
2. Materials and Methods
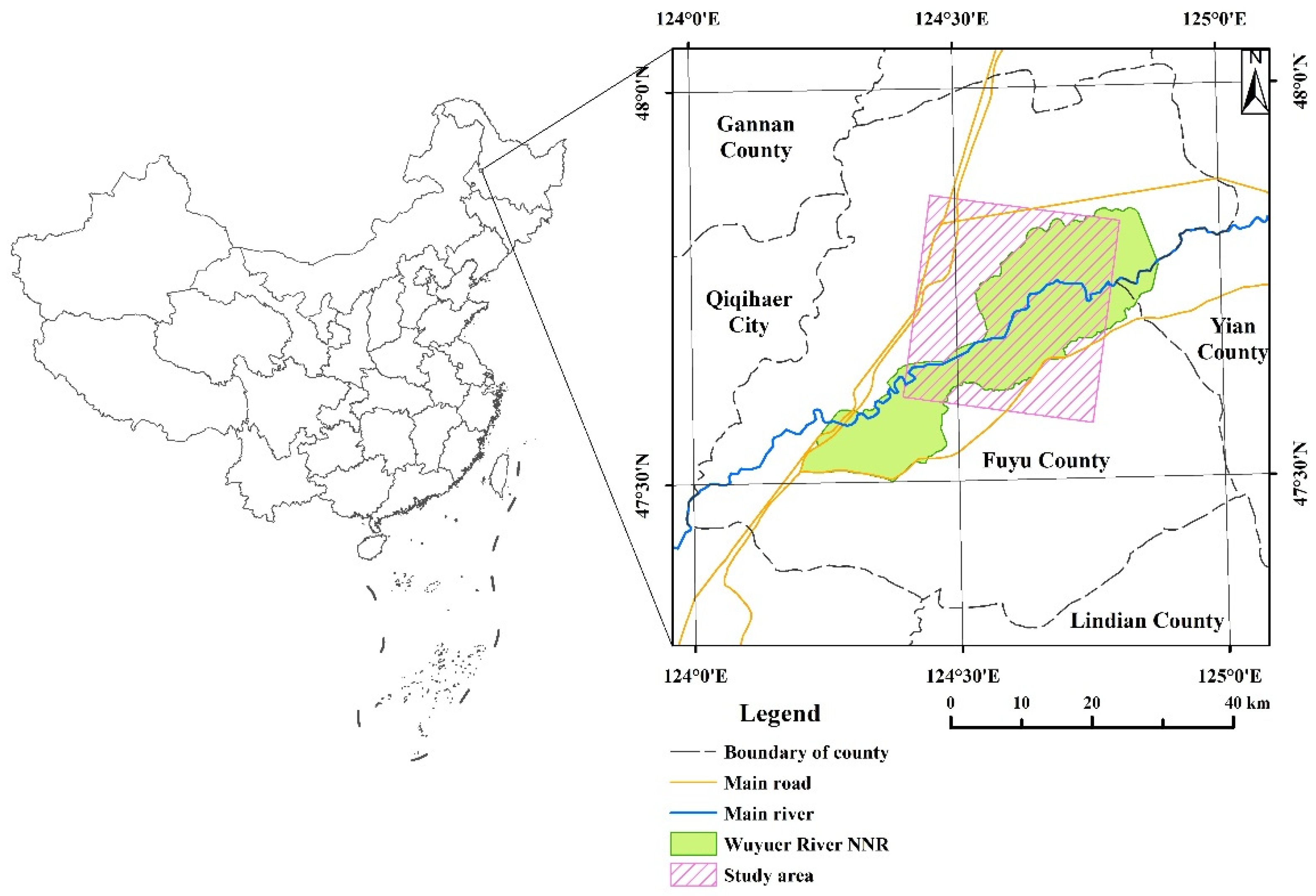
2.1. Study Area
2.2. Datasets
2.2.1. Remote Sensing Satellite Imagery
2.2.2. Field Survey Data
2.3. Image Preprocessing
2.4. Multisource Features Extraction and Selection
2.4.1. Multisource Features Extraction
2.4.2. Multisource Features Selection Method
2.5. Object-Based gcForest (OGCF) Method
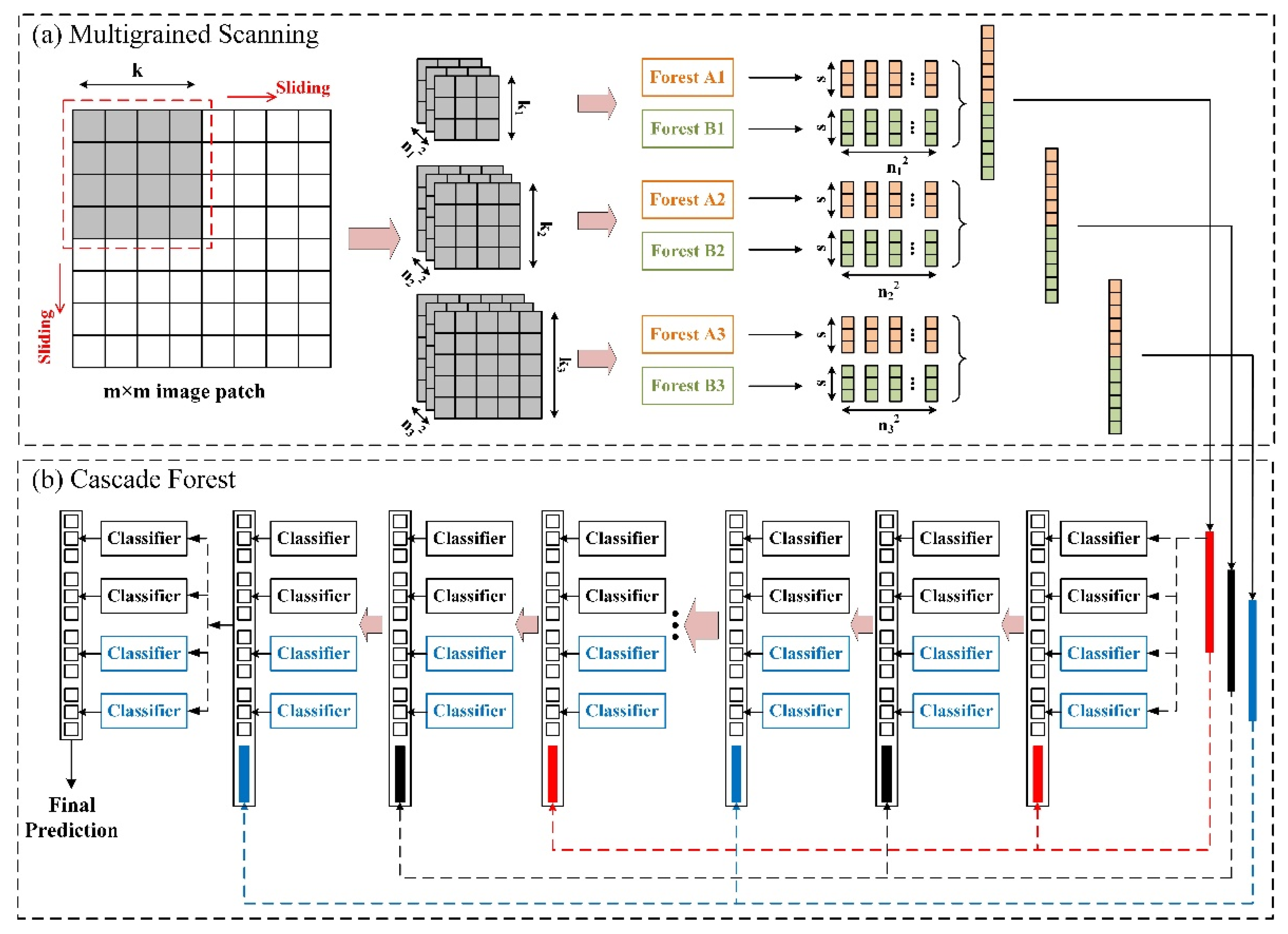
2.5.1. Multigrained Cascade Forest
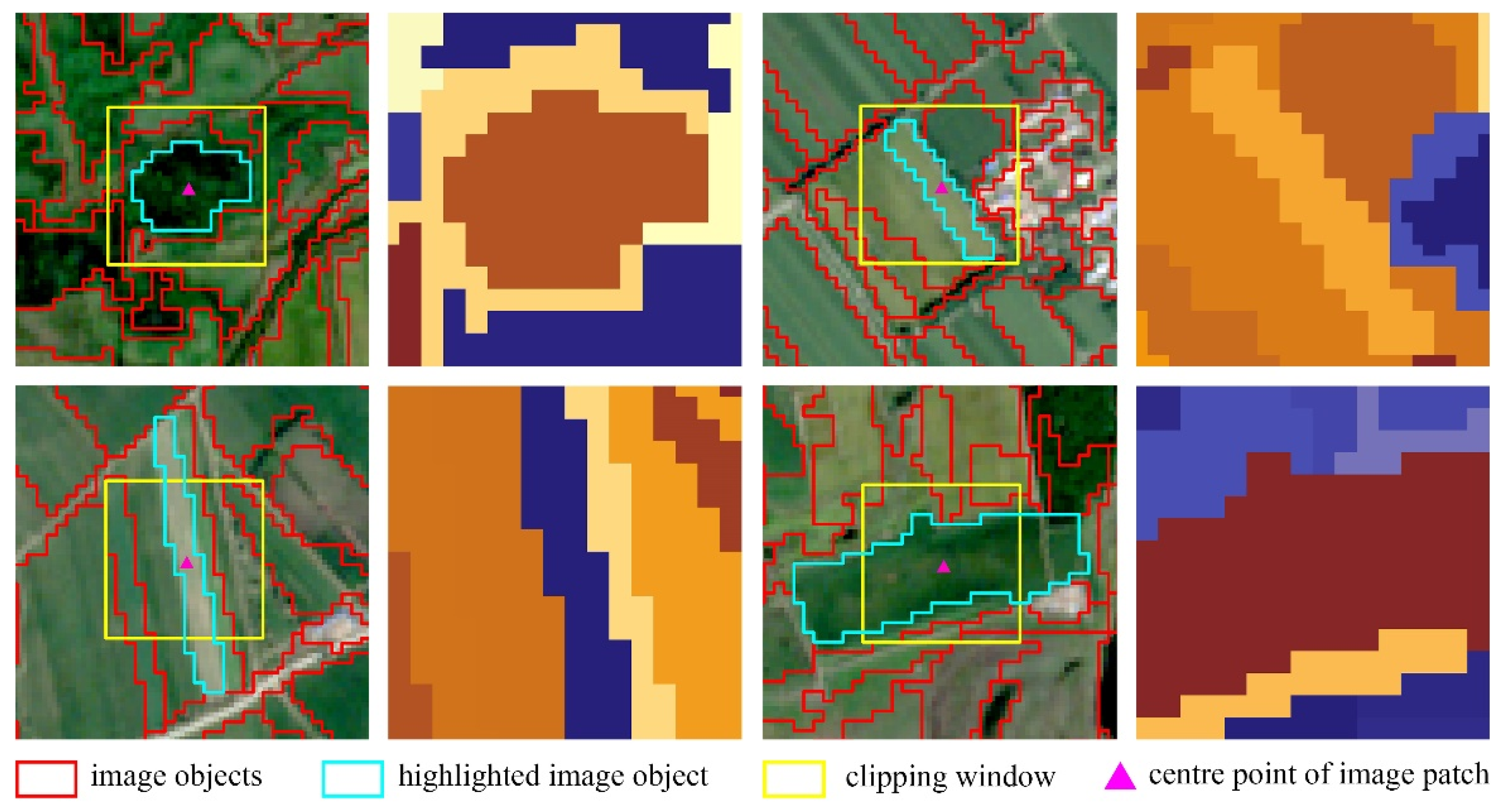
2.5.2. Image Patches Generation with Segmented Object
2.6. Accuracy Assessment
3. Results
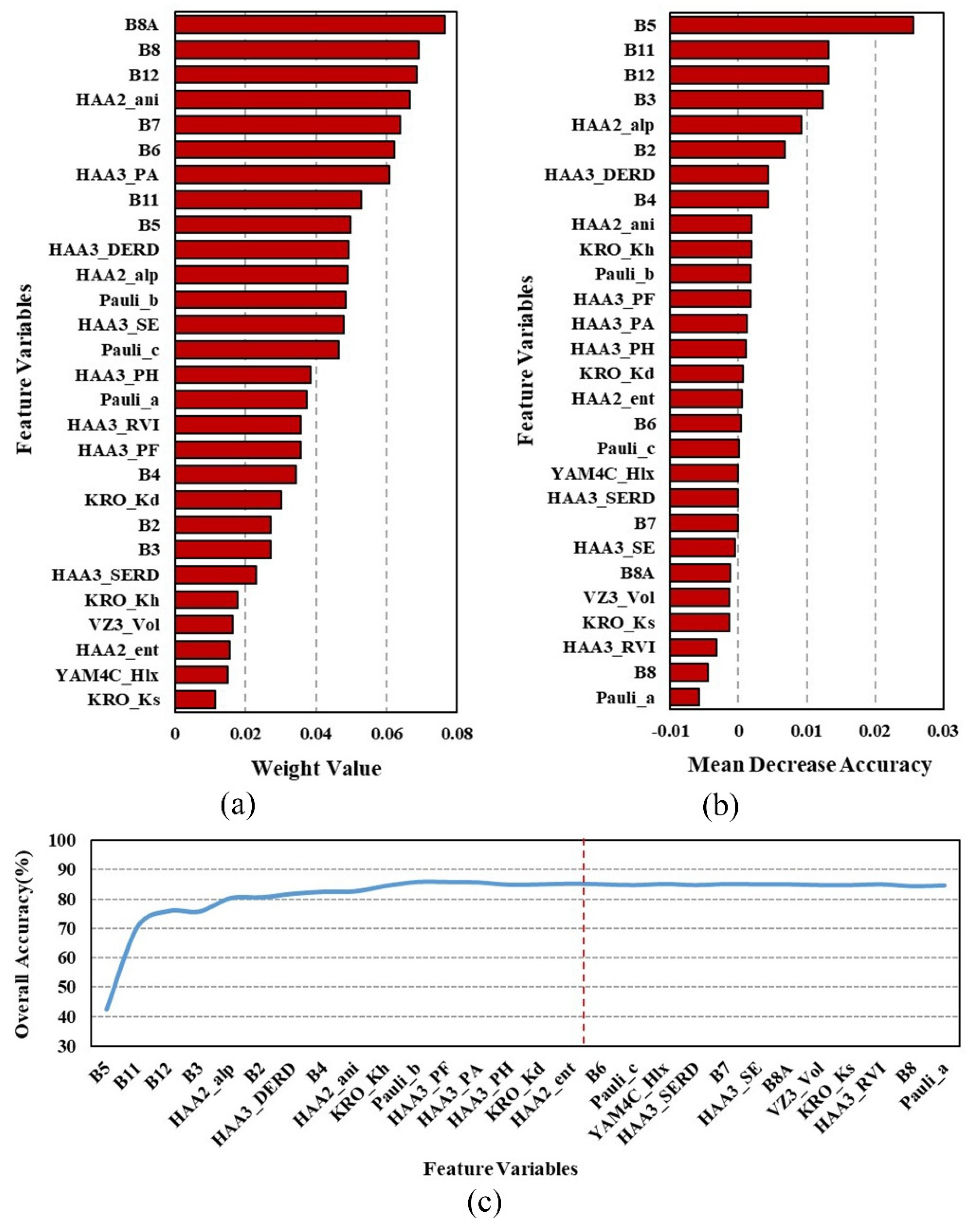
3.1. Multisource Features Importance and Feature Set Optimization
3.2. Hyper-Parameters Optimization of OGCF Method
3.2.1. Size of Sliding Window and Image Patch
3.2.2. Base Classifiers
3.3. Classification Results
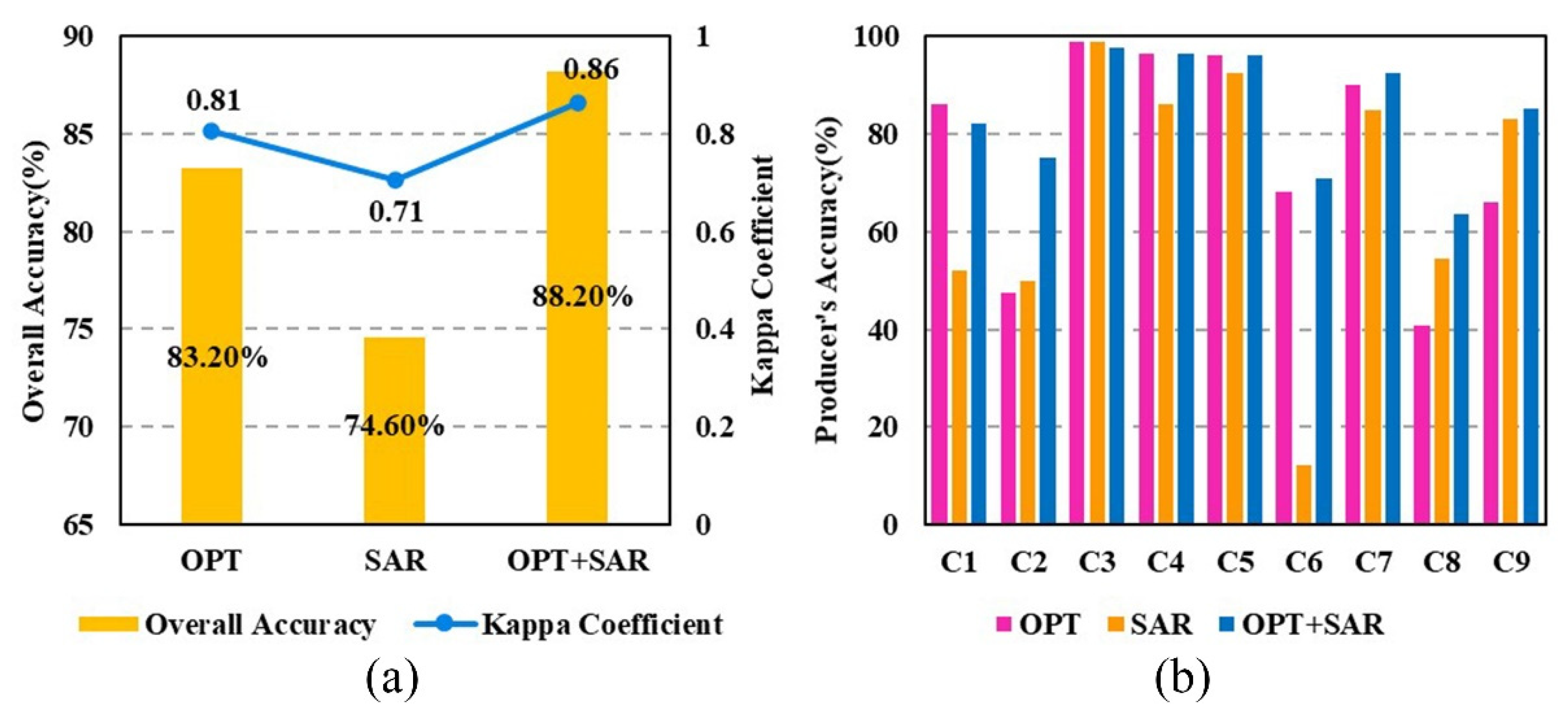
3.3.1. Accuracy Assessment of OGCF Model with Different Feature Sets
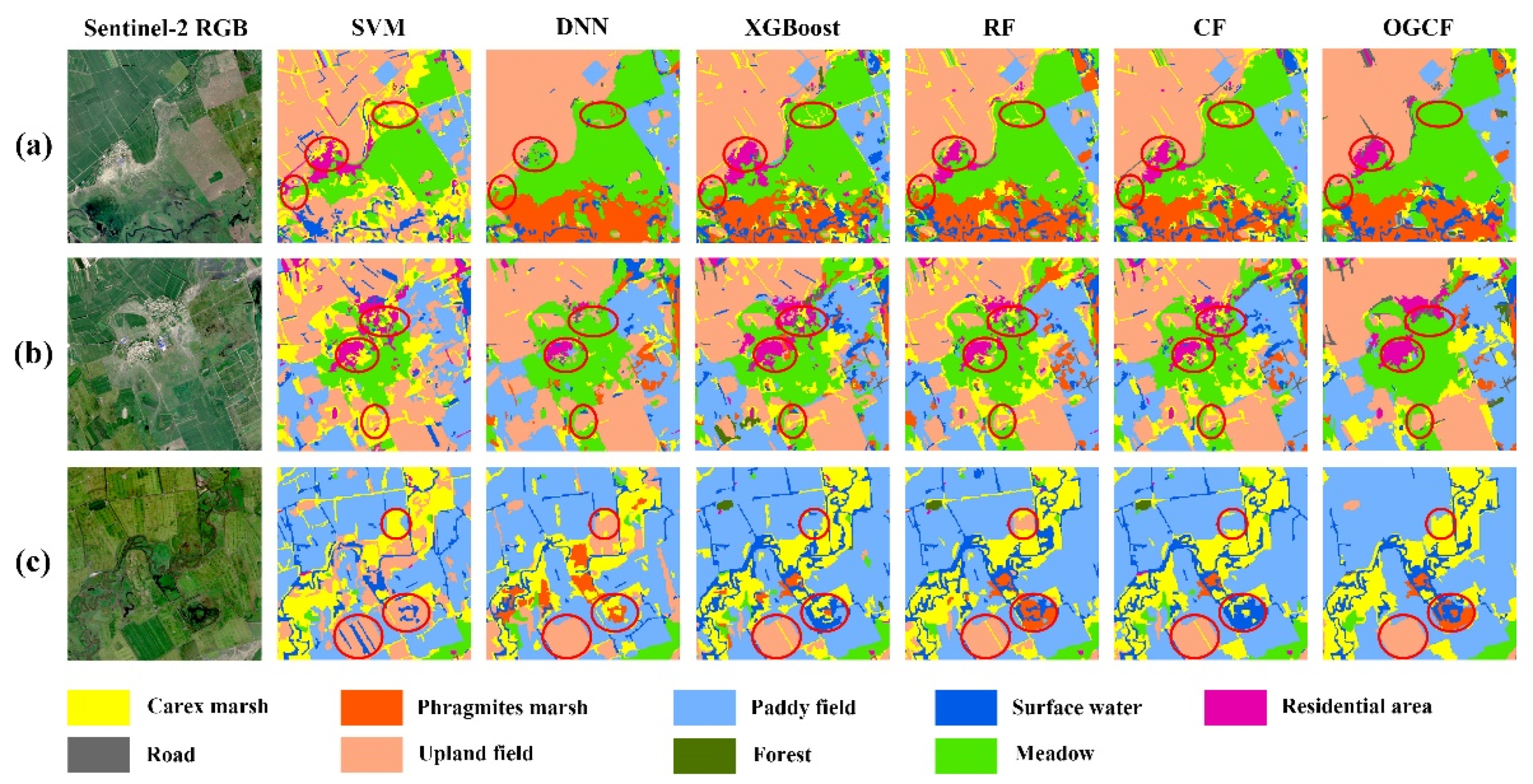
3.3.2. The OGCF Model Compared with Different Classification Methods
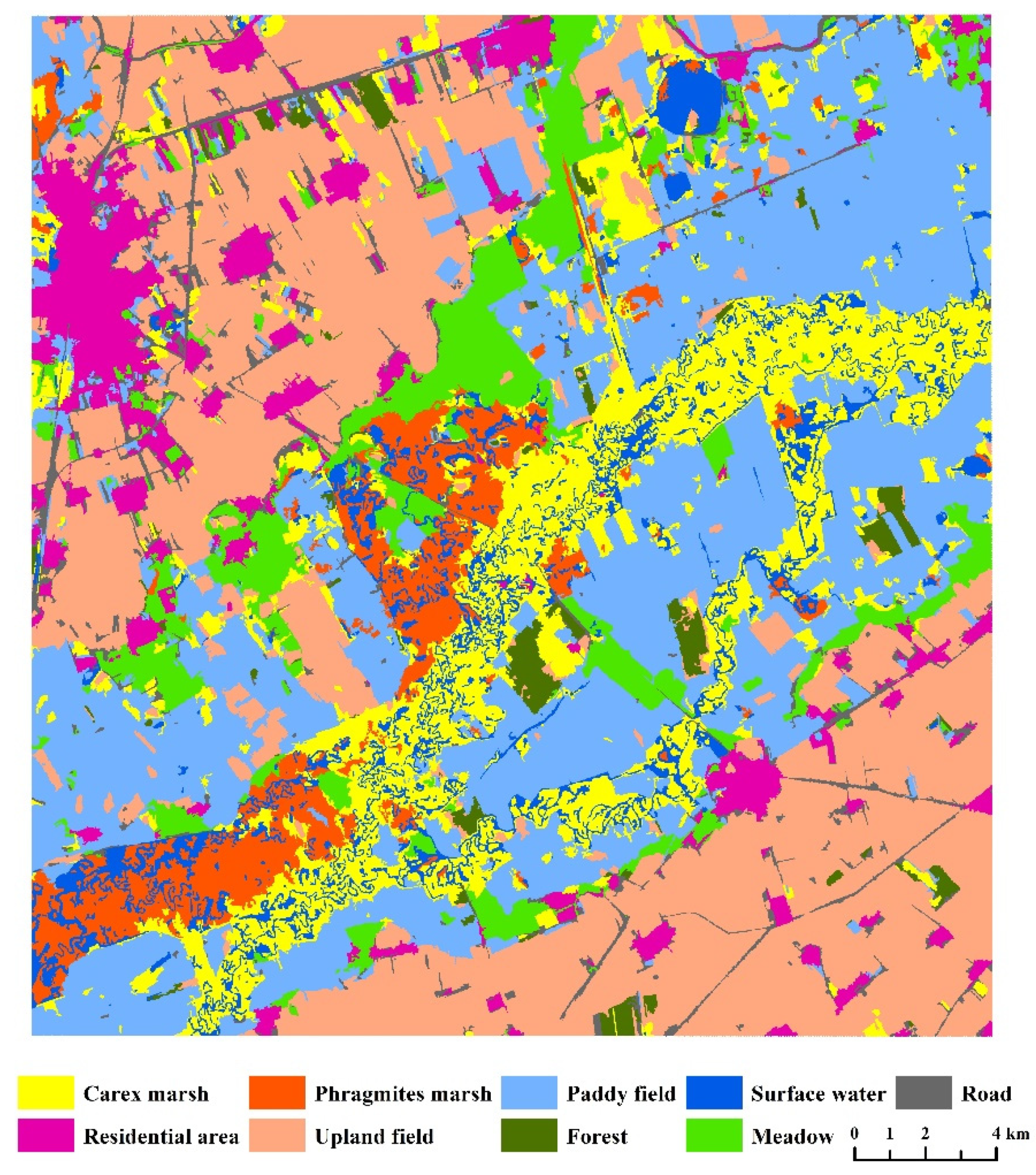
3.3.3. Classification Result of OGCF Method
4. Discussion
4.1. Multisource Features Analysis
4.2. Object-Based gcForest Method
4.2.1. Hyperparameter Optimization
4.2.2. Classification Performance Analysis
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Environmental Laboratory. Corps of Engineers Wetlands Delineation Manual, Technical Report Y-87-1; US Army Engineer Waterways Experiment Station: Vicksburgs, MI, USA, 1987.
- Bridgewater, P.; Kim, R.E. The Ramsar Convention on Wetlands at 50. Nat. Ecol. Evol. 2021, 5, 268–270. [Google Scholar] [CrossRef] [PubMed]
- Ramsar, C.S. The Ramsar Convention Manual: A Guide to the Convention on Wetlands (Ramsar, Iran, 1971), 6th ed.; Ramsar Convention Secretariat: Gland, Switzerland, 2013. [Google Scholar]
- Matthews, G.V.T. The Ramsar Convention on Wetlands: Its History and Development; Luthi, E., Ed.; Ramsar Convention Bureau: Gland, Switzerland, 1993; ISBN 2-940073-00-7. [Google Scholar]
- Su, H.; Yao, W.; Wu, Z.; Zhang, P.; Du, Q. Kernel low-rank representation with elastic net for china coastal wetland land cover classification using GF-5 hyperspectral imagery. ISPRS J. Photogramm. Remote Sens. 2021, 171, 238–252. [Google Scholar] [CrossRef]
- Powers, R.P.; Hay, G.J.; Chen, G. How wetland type and area differ through scale: A GEOBIA case study in Alberta’s Boreal Plains. Remote Sens. Environ. 2012, 117, 135–145. [Google Scholar] [CrossRef]
- Touzi, R.; Deschamps, A.; Rother, G. Wetland characterization using polarimetric RADARSAT-2 capability. Can. J. Remote Sens. 2007, 33, S56–S67. [Google Scholar] [CrossRef]
- Grenier, M.; Demers, A.-M.; Labrecque, S.; Benoit, M.; Fournier, R.A.; Drolet, B. An object-based method to map wetland using RADARSAT-1 and Landsat ETM images: Test case on two sites in Quebec, Canada. Can. J. Remote Sens. 2007, 33, S28–S45. [Google Scholar] [CrossRef]
- Deka, J.; Tripathi, O.P.; Khan, M.L. A multitemporal remote sensing approach for monitoring changes in spatial extent of freshwater lake of Deepor Beel Ramsar Site, a major wetland of Assam. J. Wetl. Ecol. 2011, 5, 40–47. [Google Scholar] [CrossRef]
- Mahdavi, S.; Sahel, B.; Granger, J.; Amani, M.; Brisco, B.; Huang, W.M. Remote sensing for wetland classification: A comprehensive review. GISci Remote Sens. 2018, 55, 623–658. [Google Scholar] [CrossRef]
- Koch, M.; Schmid, T.; Reyes, M.; Gumuzzio, J. Evaluating full polarimetric C- and L-band data for mapping wetland conditions in a semi-arid environment in central Spain. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2012, 5, 1033–1044. [Google Scholar] [CrossRef]
- Dechka, J.A.; Franklin, S.E.; Watmough, M.D.; Bennett, R.P.; Ingstrup, D.W. Classification of wetland habitat and vegetation communities using multitemporal Ikonos imagery in southern Saskatchewan. Can. J. Remote Sens. 2002, 28, 679–685. [Google Scholar] [CrossRef]
- Banks, S.N.; White, L.; Behnamian, A.; Chen, Z.H.; Montpetit, B.; Brisco, B.; Pasher, J.; Duffe, J. Wetland classification with multiangle/temporal SAR using random forests. Remote Sens. 2019, 11, 670. [Google Scholar] [CrossRef] [Green Version]
- Ficke, A.D.; Myrick, C.A.; Hansen, L.J. Potential impacts of global climate change on freshwater fisheries. Rev. Fish Biol. Fisher. 2007, 17, 581–613. [Google Scholar] [CrossRef]
- Li, L.; Chen, Y.; Xu, T.; Liu, R.; Shi, K.; Huang, C. Super-resolution mapping of wetland inundation from remote sensing imagery based on integration of back-propagation neural network and genetic algorithm. Remote Sens. Environ. 2015, 164, 142–154. [Google Scholar] [CrossRef]
- Kloiber, S.M.; Macleod, R.D.; Smith, A.J.; Knight, J.F.; Huberty, B.J. A semi-automated, multisource data fusion update of a wetland inventory for east-central Minnesota, USA. Wetlands 2015, 35, 335–348. [Google Scholar] [CrossRef]
- Fournier, R.A.; Grenier, M.; Lavoie, A.; Hélie, R. Towards a strategy to implement the Canadian wetland inventory using satellite remote sensing. Can. J. Remote Sens. 2007, 33, S1–S16. [Google Scholar] [CrossRef]
- Cowardin, L.M.; Carter, V.; Golet, F.C.; LaRos, E.T. Classification of Wetlands and Deepwater Habitats of the United States; Fish and Wildlife Service, US Department of the Interior: Washington, DC, USA, 1979.
- Stewart, R.E.; Kantrud, H.A. Classification of Natural Ponds and Lakes in the Glaciated Prairie Region; US Bureau of Sport Fisheries and Wildlife: Fairfax County, VA, USA, 1971.
- Amani, M.; Mahdavi, S.; Berard, O. Supervised wetland classification using high spatial resolution optical, SAR, and LiDAR imagery. J. Appl. Remote Sens. 2020, 14, 24502. [Google Scholar] [CrossRef]
- Adam, E.; Mutanga, O.; Rugege, D. Multispectral and hyperspectral remote sensing for identification and mapping of wetland vegetation: A review. Wetl. Ecol. Manag. 2010, 18, 281–296. [Google Scholar] [CrossRef]
- Cai, Y.L.; Sun, G.Q.; Liu, B.Q. Mapping of water body in Poyang Lake from partial spectral unmixing of MODIS data. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS ’05), Seoul, Korea, 29 July 2005; pp. 4539–4540. [Google Scholar]
- Johnston, R.M.; Barson, M.M. Remote sensing of Australian wetlands: An evaluation of Landsat TM data for inventory and classification. Mar. Freshw. Res. 1993, 44, 235–252. [Google Scholar] [CrossRef]
- Rapinel, S.; Bouzillé, J.B.; Oszwald, J.; Bonis, A. Use of bi-seasonal Landsat-8 imagery for mapping marshland plant community combinations at the regional scale. Wetlands 2015, 35, 1043–1054. [Google Scholar] [CrossRef]
- Prigent, C.; Papa, F.; Aires, F.; Jimenez, C.; Rossow, W.B.; Matthews, E. Changes in land surface water dynamics since the 1990s and relation to population pressure. Geophys. Res. Lett. 2012, 39. [Google Scholar] [CrossRef] [Green Version]
- Guo, M.; Li, J.; Sheng, C.; Xu, J.; Wu, L. A review of wetland remote sensing. Sensors 2017, 17, 777. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Heumann, B.W. An object-based classification of mangroves using a hybrid decision tree—Support vector machine approach. Remote Sens. 2011, 3, 2440–2460. [Google Scholar] [CrossRef] [Green Version]
- Lantz, N.J.; Wang, J.F. Object-based classification of WorldView-2 imagery for mapping invasive common reed, phragmites australis. Can. J. Remote Sens. 2013, 39, 328–340. [Google Scholar] [CrossRef]
- Skurikhin, A.N.; Wilson, C.J.; Liljedahl, A.; Rowland, J.C. Recursive active contours for hierarchical segmentation of wetlands in high-resolution satellite imagery of arctic landscapes. In Proceedings of the 2014 Southwest Symposium on Image Analysis and Interpretation, San Diego, CA, USA, 6–8 April 2014; pp. 137–140. [Google Scholar]
- Costa, J.D.S.; Liesenberg, V.; Schimalski, M.B.; Sousa, R.V.D.; Biffi, L.J.; Gomes, A.R.; Neto, S.L.R.; Mitishita, E.; Bispo, P.D.C. Benefits of combining ALOS/PALSAR-2 and Sentinel-2A data in the classification of land cover classes in the Santa Catarina southern Plateau. Remote Sens. 2021, 13, 229. [Google Scholar] [CrossRef]
- Li, J.; Chen, W. A rule-based method for mapping Canada’s wetlands using optical, radar and DEM data. Int. J. Remote Sens. 2005, 26, 5051–5069. [Google Scholar] [CrossRef]
- Hasituya; Chen, Z.X.; Li, F.; Hongmei. Mapping Plastic-Mulched Farmland with C-Band Full Polarization SAR Remote Sensing Data. Remote Sens. 2017, 9, 1264. [Google Scholar] [CrossRef] [Green Version]
- Valcarce-Diñeiro, R.; Arias-Pérez, B.; Lopez-Sanchez, J.M.; Sánchez, N. multiTemporal Dual- and Quad-Polarimetric Synthetic Aperture Radar Data for Crop-Type Mapping. Remote Sens. 2019, 11, 1518. [Google Scholar] [CrossRef] [Green Version]
- Hong, S.H.; Kim, H.O.; Wdowinski, S.; Feliciano, E. Evaluation of polarimetric SAR decomposition for classifying wetland vegetation types. Remote Sens. 2015, 7, 8563–8585. [Google Scholar] [CrossRef] [Green Version]
- Chen, Y.; He, X.; Wang, J. Classification of coastal wetlands in eastern China using polarimetric SAR data. Arab. J. Geosci. 2015, 8, 10203–10211. [Google Scholar] [CrossRef]
- Chen, Y.; He, X.; Wang, J.; Xiao, R. The influence of polarimetric parameters and an object-based approach on land cover classification in coastal wetlands. Remote Sens. 2014, 6, 12575–12592. [Google Scholar] [CrossRef] [Green Version]
- Chen, Y.; He, X.; Xu, J.; Zhang, R.; Lu, Y. Scattering feature set optimization and polarimetric SAR classification using object-oriented RF-SFS algorithm in coastal wetlands. Remote Sens. 2020, 12, 407. [Google Scholar] [CrossRef] [Green Version]
- Na, X.D.; Zang, S.Y.; Liu, L.; Li, M. Wetland mapping in the Zhalong National Natural Reserve, China, using optical and radar imagery and topographical data. J. Appl. Remote Sens. 2013, 7, 073554. [Google Scholar] [CrossRef]
- Van Beijma, S.; Comber, A.; Lamb, A. Random forest classification of salt marsh vegetation habitats using quad-polarimetric airborne SAR, elevation and optical RS data. Remote Sens. Environ. 2014, 149, 118–129. [Google Scholar] [CrossRef]
- Pham, T.D.; Xia, J.S.; Baier, G.; Le, N.N.; Yokoya, N. Mangrove species mapping using Sentinel-1 and Sentinel-2 data in north Vietnam. In Proceedings of the IGARSS 2019-2019 IEEE International Geoscience and Remote Sensing Symposium, Yokohama, Japan, 28 July–2 August 2019; pp. 6102–6105. [Google Scholar]
- Pavanelli, J.A.P.; Santos, J.R.; Galvão, L.S.; Xaud, M.; Xaud, H.A.M. PALSAR-2/ALOS-2 and OLI/LANDSAT-8 data integration for land use and land cover mapping in northern Brazilian Amazon. B. Cienc. Geod. 2018, 24, 250–269. [Google Scholar] [CrossRef]
- Melgani, F.; Bruzzone, L. Classification of hyperspectral remote sensing images with support vector machines. IEEE Trans. Geosci. Remote Sens. 2004, 42, 1778–1790. [Google Scholar] [CrossRef] [Green Version]
- Zhang, C.; Sargent, O.I.; Pan, X.; Li, H.; Gardiner, A.; Hare, J.; Atkinson, P.M. An object-based convolutional neural network (OCNN) for urban land use classification. Remote Sens. Environ. 2018, 216, 57–70. [Google Scholar] [CrossRef] [Green Version]
- Blaschke, T. Object based image analysis for remote sensing. ISPRS J. Photogramm. Remote Sens. 2010, 65, 2–16. [Google Scholar] [CrossRef] [Green Version]
- Amani, M.; Salehi, B.; Mahdavi, S.; Granger, J.E.; Brisco, B.; Hanson, A. Wetland classification using multisource and multitemporal optical remote sensing data in Newfoundland and Labrador, Canada. Can. J. Remote Sens. 2017, 43, 360–373. [Google Scholar] [CrossRef]
- Mahdavi, S.; Salehi, B.; Amani, M.; Granger, J.; Brisco, B.; Huang, W. A dynamic classification scheme for mapping spectrally similar classes: Application to wetland classification. Int. J. Appl. Earth Obs. 2019, 83, 101914. [Google Scholar] [CrossRef]
- Vapnik, V.N. The Nature of Statistical Learning Theory, 2nd ed.; Jordan, M., Laurizen, S.L., Lawless, J.F., Nair, V., Eds.; Springer Science & Business Media: Berlin/Heidelberg, Germany, 1999; ISBN 0-387-98780-0. [Google Scholar]
- Huang, G.B.; Zhu, Q.Y.; Siew, C.K. Extreme learning machine: Theory and applications. Neurocomputing 2006, 70, 489–501. [Google Scholar] [CrossRef]
- Rumelhart, D.E.; Hinton, G.E.; McClelland, J.L. Parallel Distributed Processing; MIT Press: Cambridge, MA, USA, 1986. [Google Scholar]
- Quinlan, J.R. Induction of decision trees. Mach. Learn. 1986, 1, 81–106. [Google Scholar] [CrossRef] [Green Version]
- Breiman, L. Random forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef] [Green Version]
- Chen, T.Q.; Guestrin, C. XGBoost: A scalable tree boosting system. In Proceedings of the 22nd ACM SIGKDD International Conference on Knowledge Discovery and Data Mining, New York, NY, USA, 13–17 August 2016; pp. 785–794. [Google Scholar]
- Shanmugam, P.; Ahn, Y.H.; Sanjeevi, S. A comparison of the classification of wetland characteristics by linear spectral mixture modelling and traditional hard classifiers on multispectral remotely sensed imagery in southern India. Ecol. Model. 2006, 194, 379–394. [Google Scholar] [CrossRef]
- Kumar, L.; Sinha, P.; Taylor, S. Improving image classification in a complex wetland ecosystem through image fusion techniques. J. Appl. Remote Sens. 2014, 8, 083616. [Google Scholar] [CrossRef] [Green Version]
- DeLancey, E.R.; Simms, J.F.; Mahdianpari, M.; Brisco, B.; Mahoney, C.; Kariyeva, J. Comparing deep learning and shallow learning for large-scale wetland classification in Alberta, Canada. Remote Sens. 2019, 12, 2. [Google Scholar] [CrossRef] [Green Version]
- DeLancey, E.R.; Kariyeva, J.; Bried, J.T.; Hird, J.N. Large-scale probabilistic identification of boreal peatlands using Google Earth Engine, open-access satellite data, and machine learning. PLoS ONE 2019, 14, e0218165. [Google Scholar] [CrossRef] [Green Version]
- Hikouei, I.S.; Kim, S.S.; Mishra, D.R. Machine-learning classification of soil bulk density in salt marsh environments. Sensors 2021, 21, 4408. [Google Scholar] [CrossRef]
- Dube, T.; Mutanga, O. Evaluating the utility of the medium-spatial resolution Landsat 8 multispectral sensor in quantifying aboveground biomass in uMgeni catchment, South Africa. ISPRS J. Photogramm. Remote Sens. 2015, 101, 36–46. [Google Scholar] [CrossRef]
- Ghosh, S.M.; Behera, M.D. Aboveground biomass estimation using multisensor data synergy and machine learning algorithms in a dense tropical forest. Appl. Geogr. 2018, 96, 29–40. [Google Scholar] [CrossRef]
- Ma, Y.; Song, K.; Wen, Z.; Liu, G.; Shang, Y.; Lyu, L.; Du, J.; Yang, Q.; Li, S.; Tao, H.; et al. Remote sensing of turbidity for lakes in northeast China using Sentinel-2 images with machine learning algorithms. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 9132–9146. [Google Scholar] [CrossRef]
- Zhou, Z.H.; Feng, J. Deep Forest: Towards an Alternative to Deep Neural Networks. arXiv 2017, arXiv:1702.08835. [Google Scholar]
- Cao, X.; Li, R.; Wen, L.; Feng, J.; Jiao, L. Deep multiple feature fusion for hyperspectral image classification. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 3880–3891. [Google Scholar] [CrossRef]
- Cao, X.; Li, R.; Ge, Y.; Wu, B.; Jiao, L. Densely connected deep random forest for hyperspectral imagery classification. Int. J. Remote Sens. 2019, 40, 3606–3622. [Google Scholar] [CrossRef]
- Utkin, L.V. An imprecise deep forest for classification. Expert Syst. Appl. 2020, 141, 112978. [Google Scholar] [CrossRef]
- Ma, W.; Yang, H.; Wu, Y.; Xiong, Y.; Hu, T.; Jiao, L.; Hou, B. Change detection based on multigrained cascade forest and multiscale fusion for SAR images. Remote Sens. 2019, 11, 142. [Google Scholar] [CrossRef] [Green Version]
- Xia, M.; Tian, N.; Zhang, Y.; Xu, Y.; Zhang, X. Dilated multiscale cascade forest for satellite image classification. Int. J. Remote Sens. 2020, 41, 7779–7800. [Google Scholar] [CrossRef]
- Utkin, L.V.; Ryabinin, M.A. Discriminative metric learning with deep forest. Int. J. Artif. Intell. Tools 2019, 28, 1950007. [Google Scholar] [CrossRef] [Green Version]
- Li, M.; Zhang, N.; Pan, B.; Xie, S.; Wu, X.; Shi, Z. Hyperspectral Image Classification Based on Deep Forest and Spectral-Spatial Cooperative Feature. In Proceedings of the International Conference on Image and Graphics, Shanghai, China, 13–15 September 2017; pp. 325–336. [Google Scholar]
- Cui, J.; Zang, S.; Zhai, D.; Wu, B. Potential ecological risk of heavy metals and metalloid in the sediments of Wuyuer River basin, Heilongjiang Province, China. Ecotoxicology 2014, 23, 589–600. [Google Scholar] [CrossRef] [PubMed]
- Li, F.; Li, H.; Lu, W.; Zhang, G.; Kim, J. Meteorological drought monitoring in Northeastern China using multiple indices. Water 2019, 11, 72. [Google Scholar] [CrossRef] [Green Version]
- Huang, F.; Wang, P.; Li, Y. Mapping ecosystem service dynamic in Wuyuer River watershed, Northeast China from 1954 to 2000. In Proceedings of the Geoinformatics 2007: Remotely Sensed Data and Information, Nanjing, China, 15 August 2007. [Google Scholar]
- Drusch, M.; Del Bello, U.; Carlier, S.; Colin, O.; Fernandez, V.; Gascon, F.; Hoersch, B.; Isola, C.; Laberinti, P.; Martimort, P.; et al. Sentinel-2: ESA’s Optical High-Resolution Mission for GMES Operational Services. Remote Sens. Environ. 2012, 120, 25–36. [Google Scholar] [CrossRef]
- Qi, Z.; Yeh, A.G.O.; Li, X.; Lin, Z. A novel algorithm for land use and land cover classification using RADARSAT-2 polarimetric SAR data. Remote Sens. Environ. 2012, 118, 21–39. [Google Scholar] [CrossRef]
- Salehi, M.; Sahebi, M.R.; Maghsoudi, Y. Improving the accuracy of urban land cover classification using Radarsat-2 PolSAR data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 1394–1401. [Google Scholar] [CrossRef]
- Cloude, S.R.; Pottier, E. An entropy based classification scheme for land applications of polarimetric SAR. IEEE Trans. Geosci. Remote Sens. 1997, 35, 68–78. [Google Scholar] [CrossRef]
- Huynen, J.R. Stokes matrix parameters and their interpretation in terms of physical target properties. In Proceedings of the Polarimetry: Radar, Infrared, Visible, Ultraviolet, and X-Ray, Huntsville, AL, USA, 1 October 1990; pp. 195–207. [Google Scholar]
- Barnes, R.M. Roll-invariant decompositions for the polarization covariance matrix. In Proceedings of the Polarimetry Technology Workshop, Redstone Arsenal, AL, USA, 16–18 August 1988. [Google Scholar]
- Cloude, S.R.; Pottier, E. A review of target decomposition theorems in radar polarimetry. IEEE Trans. Geosci. Remote Sens. 1996, 34, 498–518. [Google Scholar] [CrossRef]
- Holm, W.A.; Barnes, R.M. On radar polarization mixed target state decomposition techniques. In Proceedings of the 1988 IEEE National Radar Conference, Ann Arbor, MI, USA, 20–21 April 1988; pp. 249–254. [Google Scholar]
- Freeman, A.; Durden, S.L. A three-component scattering model for polarimetric SAR data. IEEE Trans. Geosci. Remote Sens. 1998, 36, 963–973. [Google Scholar] [CrossRef] [Green Version]
- van Zyl, J.J. Application of Cloude’s target decomposition theorem to polarimetric imaging radar data. Proc. SPIE 1993, 1748, 184–191. [Google Scholar] [CrossRef] [Green Version]
- Krogager, E. New decomposition of the radar target scattering matrix. Electron. Lett. 1990, 26, 1525–1527. [Google Scholar] [CrossRef]
- Pottier, E.; Cloude, S.R. Application of the H/A/alpha polarimetric decomposition theorem for land classification. In Proceedings of the Wideband Interferometric Sensing and Imaging Polarimetry, San Diego, CA, USA, 23 December 1997; pp. 132–143. [Google Scholar]
- Yamaguchi, Y.; Moriyama, T.; Ishido, M.; Yamada, H. Four-component scattering model for polarimetric SAR image decomposition. IEEE Trans. Geosci. Remote Sens. 2005, 43, 1699–1706. [Google Scholar] [CrossRef]
- Kononenko, I. Estimating attributes: Analysis and extensions of RELIEF. In Proceedings of the European Conference on Machine Learning, Catania, Italy, 6–8 April 1994; pp. 171–182. [Google Scholar]
- Rodriguez-Galiano, V.F.; Chica-Olmo, M.; Abarca-Hernandez, F.; Atkinson, P.M.; Jeganathan, C. Random Forest classification of Mediterranean land cover using multi-seasonal imagery and multi-seasonal texture. Remote Sens. Environ. 2012, 121, 93–107. [Google Scholar] [CrossRef]
- Hinton, G.E.; Salakhutdinov, R.R. Reducing the dimensionality of data with neural networks. Science 2006, 313, 504–507. [Google Scholar] [CrossRef] [Green Version]
- Sinha, S.K.; Purkayastha, B.S. Extra-Tree: A model to organize execution traces of Web services. In Proceedings of the International Conference on Computer Information Systems and Industrial Management Applications (CISIM), Krakow, Poland, 8–10 October 2010; pp. 497–501. [Google Scholar]
- Zhang, J.; Song, H.; Zhou, B. SAR Target Classification Based on Deep Forest Model. Remote Sens. 2020, 12, 128. [Google Scholar] [CrossRef] [Green Version]
- Breslow, N.E.; Cain, K.C. Logistic regression for two-stage case-control data. Biometrika 1988, 75, 11–20. [Google Scholar] [CrossRef]
- Rossiter, D.G. Technical Note: Statistical Methods for Accuracy Assessment of Classified Thematic Maps; International Institute for Geo-information Science & Earth Observation (ITC): Enschede, The Netherlands, 2004. [Google Scholar]
- Cloude, S.R. Target decomposition theorems in radar scattering. Electron. Lett. 1985, 21, 22–24. [Google Scholar] [CrossRef]
- Woodhouse, I.H. Polarimetric radar imaging: From basics to applications by Jong-Sen Lee and Eric Pottier. Int. J. Remote Sens. 2012, 33, 333–334. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Decomposition Method | Polarimetric Decomposition Features | Abbreviation | Reference |
|---|---|---|---|
| Pauli | Pauli_a | Pauli_a | Cloude, S.R. [75] |
| Pauli_b | Pauli_b | ||
| Pauli_c | Pauli_c | ||
| Pauli_T11 | Pauli_T11 | ||
| Pauli_T22 | Pauli_T22 | ||
| Pauli_T33 | Pauli_T33 | ||
| Huynen | Huynen_T11 | JRH_T11 | Huynen, J.R. [76] |
| Huynen_T22 | JRH_T22 | ||
| Huynen_T33 | JRH_T33 | ||
| Barnes | Barnes_T11 | RMB_T11 | Barnes, R.M. [77] |
| Barnes_T22 | RMB_T22 | ||
| Barnes_T33 | RMB_T33 | ||
| Cloude | Cloude_T11 | SRC_T11 | Cloude, S.R. [78] |
| Cloude_T22 | SRC_T22 | ||
| Cloude_T33 | SRC_T33 | ||
| Holm | Holm_T11 | WAH_T11 | Holm, W.A. [79] |
| Holm_T22 | WAH_T22 | ||
| Holm_T33 | WAH_T33 | ||
| Freeman3 | Freeman3_Vol | FRE3_Vol | Freeman, A. [80] |
| Freeman3_Odd | FRE3_Odd | ||
| Freeman3_Dbl | FRE3_Dbl | ||
| Van Zyl3 | Van Zyl3_Vol | VZ3_Vol | Vanzyl, J.J. [81] |
| Van Zyl3_Odd | VZ3_Odd | ||
| Van Zyl3_Dbl | VZ3_Dbl | ||
| Krogager | Krogager_Kd | KRO_Kd | Krogager, E. [82] |
| Krogager_Kh | KRO_Kh | ||
| Krogager_Ks | KRO_Ks | ||
| H/A/Alpha | H/A/Alpha_T11 | HAA1_T11 | Pottier, E. [83] |
| H/A/Alpha_T22 | HAA1_T22 | ||
| H/A/Alpha_T33 | HAA1_T33 | ||
| H/A/Alpha_Alpha | HAA2_alp | ||
| H/A/Alpha_Anisotropy | HAA2_ani | ||
| H/A/Alpha_Entropy | HAA2_ent | ||
| H/A/Alpha_DERD | HAA3_DERD | ||
| H/A/Alpha_SERD | HAA3_SERD | ||
| H/A/Alpha_RVI | HAA3_RVI | ||
| H/A/Alpha_Polarization asymmetry | HAA3_PA | ||
| H/A/Alpha_Polarization fraction | HAA3_PF | ||
| H/A/Alpha_Pedestal height | HAA3_PH | ||
| H/A/Alpha_Shannon entropy | HAA3_SE | ||
| Yamaguchi4 | Yamaguchi4_Vol | YAM4_Vol | Yamaguchi, Y. [84] |
| Yamaguchi4_Odd | YAM4_Odd | ||
| Yamaguchi4_Dbl | YAM4_Dbl | ||
| Yamaguchi4_Hlx | YAM4_Hlx |
| Class Code | Land Cover Classes | Number of Samples | |||
|---|---|---|---|---|---|
| Calibration | Validation | Test | |||
| C1 | Wetland | Carex marsh | 78 | 26 | 50 |
| C2 | Phragmites marsh | 52 | 17 | 40 | |
| C3 | Paddy field | 119 | 39 | 81 | |
| C4 | Surface water | 85 | 29 | 87 | |
| C5 | Non-wetland | Residential area | 67 | 22 | 52 |
| C6 | Road | 15 | 5 | 41 | |
| C7 | Upland field | 95 | 31 | 80 | |
| C8 | Forest | 6 | 2 | 22 | |
| C9 | Meadow | 47 | 15 | 47 | |
| Total | 564 | 186 | 500 | ||
| Image Patch Size | Sliding Window Size | |||||||
|---|---|---|---|---|---|---|---|---|
| 8 × 8/12 × 12/16 × 16 | 12 × 12/18 × 18/24 × 24 | 16 × 16/24 × 24/32 × 32 | 20 × 20/30 × 30/40 × 40 | |||||
| OA (%) | Time (s) | OA (%) | Time (s) | OA (%) | Time (s) | OA (%) | Time (s) | |
| 16 × 16 | 83.86 | 178 | ||||||
| 20 × 20 | 85.81 | 324 | ||||||
| 24 × 24 | 84.22 | 613 | 82.62 | 224 | ||||
| 28 × 28 | 82.80 | 985 | 83.51 | 423 | ||||
| 32 × 32 | 81.74 | 1351 | 84.92 | 702 | 86.17 | 489 | ||
| 36 × 36 | 82.62 | 1875 | 82.80 | 1156 | 85.28 | 937 | ||
| 40 × 40 | 79.43 | 2521 | 81.03 | 1715 | 84.75 | 1243 | 85.46 | 934 |
| 44 × 44 | 80.49 | 3128 | 80.14 | 2304 | 82.98 | 1666 | 84.22 | 1347 |
| 48 × 48 | 80.32 | 3353 | 78.90 | 2901 | 80.49 | 2365 | 83.86 | 1972 |
| Classifier Type | Number of Base Classifiers | |||||
|---|---|---|---|---|---|---|
| E1 | E2 | E3 | E4 | E5 | E6 | |
| RF | 1 | 1 | 1 | 2 | 2 | 2 |
| ET | 1 | 1 | 1 | 1 | 2 | 2 |
| XGBoost | 0 | 1 | 1 | 1 | 1 | 2 |
| LR | 0 | 0 | 1 | 1 | 1 | 2 |
| Overall Accuracy (%) | 76.95 | 84.75 | 85.99 | 82.97 | 83.15 | 84.04 |
| Time(s) | 295 | 423 | 502 | 505 | 608 | 735 |
| C1 | C2 | C3 | C4 | C5 | C6 | C7 | C8 | C9 | UA (%) | |
|---|---|---|---|---|---|---|---|---|---|---|
| C1 | 41 | 3 | 1 | 3 | 0 | 0 | 2 | 5 | 5 | 69.49 |
| C2 | 0 | 30 | 0 | 1 | 0 | 0 | 0 | 0 | 1 | 93.75 |
| C3 | 5 | 0 | 79 | 0 | 0 | 3 | 3 | 0 | 0 | 87.78 |
| C4 | 1 | 6 | 0 | 84 | 0 | 0 | 0 | 0 | 0 | 92.31 |
| C5 | 0 | 0 | 1 | 0 | 50 | 5 | 0 | 0 | 1 | 87.72 |
| C6 | 0 | 0 | 0 | 0 | 1 | 29 | 0 | 0 | 0 | 96.67 |
| C7 | 0 | 0 | 0 | 0 | 0 | 3 | 74 | 3 | 0 | 92.50 |
| C8 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 14 | 0 | 93.33 |
| C9 | 3 | 1 | 0 | 0 | 1 | 1 | 0 | 0 | 40 | 86.96 |
| PA (%) | 82.00 | 75.00 | 97.53 | 96.55 | 96.15 | 70.73 | 92.50 | 63.64 | 85.11 | |
| Overall Accuracy = 88.20% | ||||||||||
| Kappa Coefficient = 0.86 | ||||||||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, H.; Jiang, Q.; Ma, Y.; Yang, Q.; Shi, P.; Zhang, S.; Tan, Y.; Xi, J.; Zhang, Y.; Liu, B.; et al. Object-Based Multigrained Cascade Forest Method for Wetland Classification Using Sentinel-2 and Radarsat-2 Imagery. Water 2022, 14, 82. https://doi.org/10.3390/w14010082
Liu H, Jiang Q, Ma Y, Yang Q, Shi P, Zhang S, Tan Y, Xi J, Zhang Y, Liu B, et al. Object-Based Multigrained Cascade Forest Method for Wetland Classification Using Sentinel-2 and Radarsat-2 Imagery. Water. 2022; 14(1):82. https://doi.org/10.3390/w14010082
Chicago/Turabian StyleLiu, Huaxin, Qigang Jiang, Yue Ma, Qian Yang, Pengfei Shi, Sen Zhang, Yang Tan, Jing Xi, Yibo Zhang, Bin Liu, and et al. 2022. "Object-Based Multigrained Cascade Forest Method for Wetland Classification Using Sentinel-2 and Radarsat-2 Imagery" Water 14, no. 1: 82. https://doi.org/10.3390/w14010082