
Geospatial Technologies Used in the Management of Water Resources in West of Romania



 and
and
Abstract
:1. Introduction
2. Materials and Methods
2.1. Methodology
2.1.1. GNSS Technology
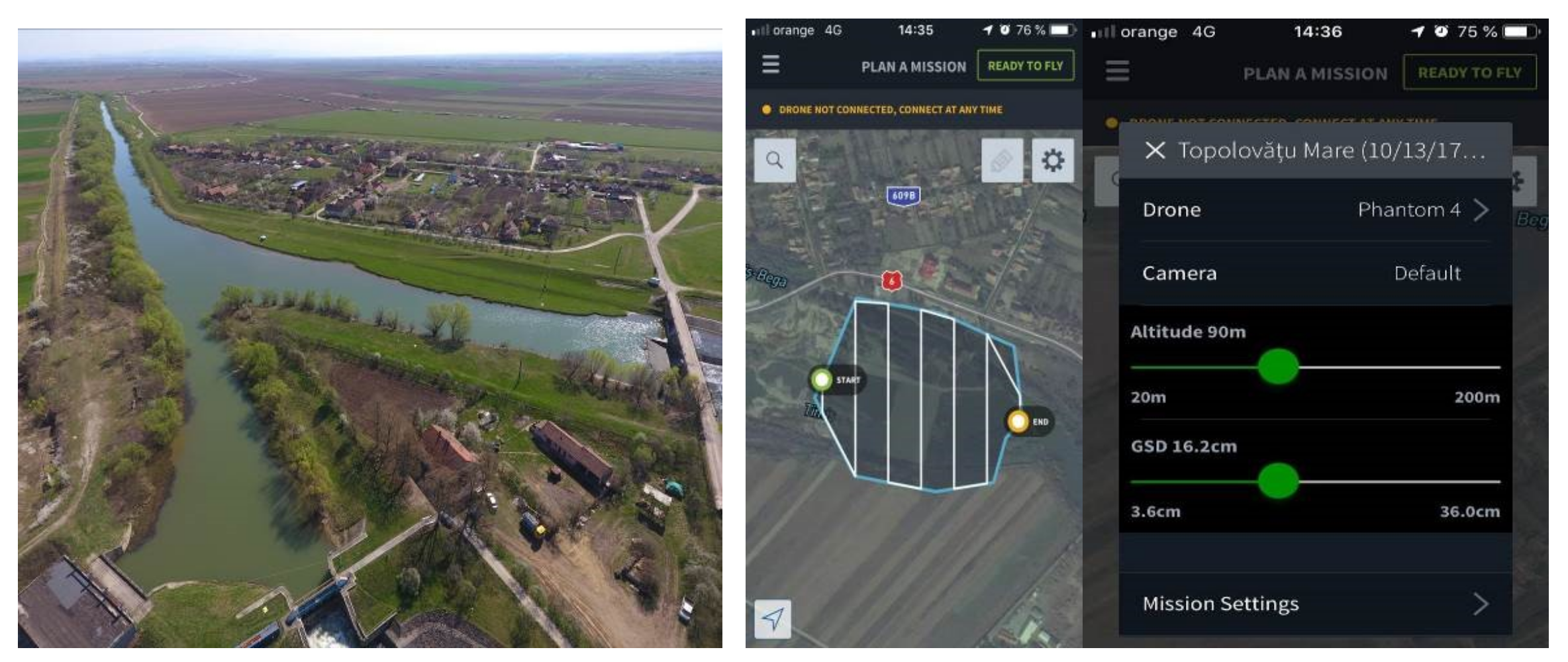
2.1.2. UAV Technology
2.1.3. TLS Technology
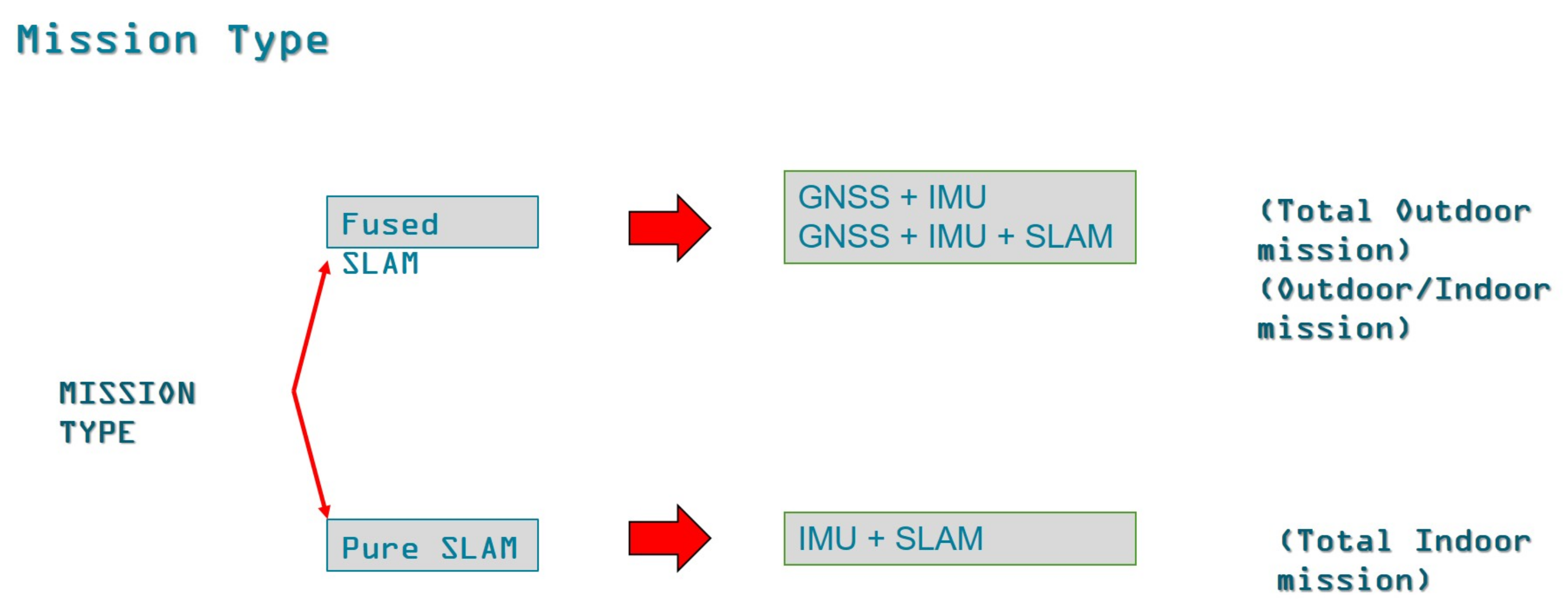
2.1.4. MMS Technology
LiDAR Data Acquisition Using MMS
- Planning the LiDAR data acquisition mission: preparing the street lanes for the missions performed outside or the route on which it will have to be followed or, in case of inside scanning, viewing the interior and creating space for turns and walks, opening and fixing the doors. Planning for the three objectives was done using the Google Earth [25] outdoor program.
- Initialization of the equipment: in order to obtain data with high accuracy, the initialization has been done near the scanned objectives, in open air area, not covered by obstacles (trees, buildings). Initialisation consists of two steps (Figure 5):
- STATIC initialization, for a period of 5 min, during which the backpack will stand still for 15–20 min.
- min in case the ALMANAC will have to be updated, Almanach update needed when travelling > 200 km from last project site.
- DYNAMIC initialization, with a duration of 3–5 min, during which the backpack is worn on the back, making a quadrilateral walking with it in the back, and, at the end, a walk on the diagonals of the quadrilateral until the INS GOOD message appears, and the INS_GNSS will have a value below 1; usually, the indicated value is 0.1–0.2.
Placing the Master GNSS Station and Collection of GCP Control Points
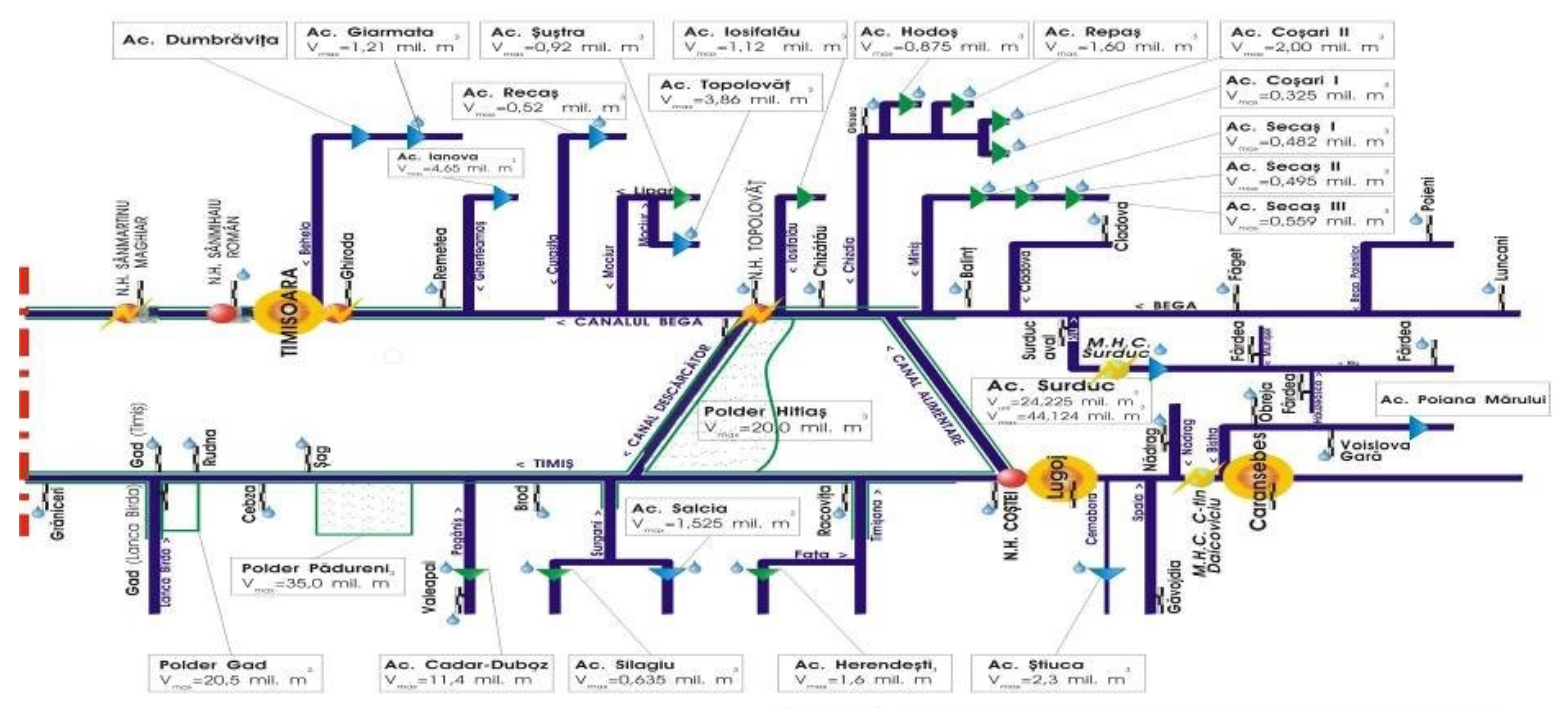
2.2. Description of the Hydrotechnical and Hydro-Ameliorative Arrangements under Study
2.2.1. Topolovăţu Mic Hydrotechnical Node
2.2.2. Coșteiu Hydrotechnical Node
2.2.3. Sânmartinu Maghiar Hydrotechnical Node
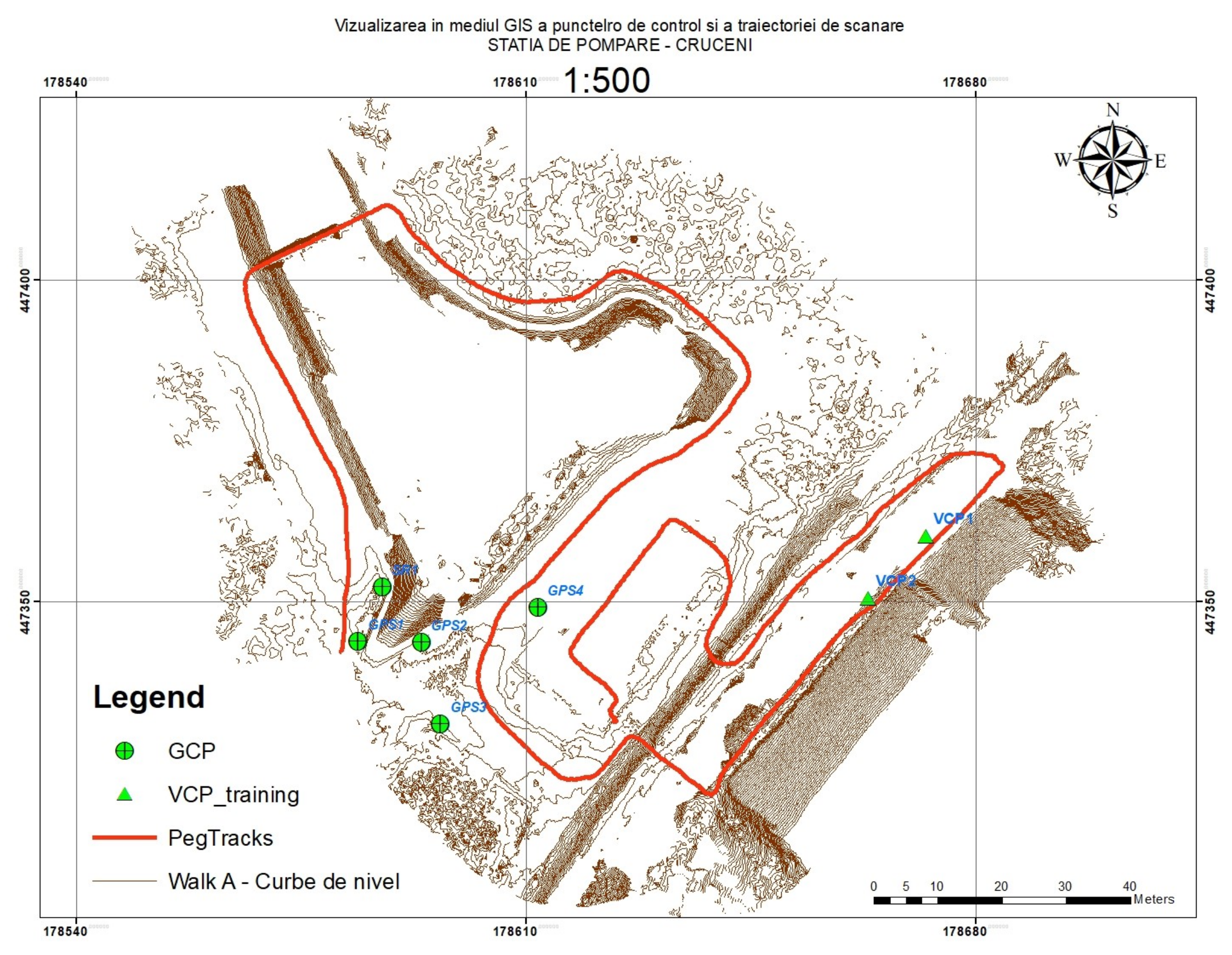
2.2.4. Cruceni Pumping Station
3. Results and Discussions
3.1. The Use of GNSS Technology to Thicken the Geodetic Network through Satellite Measurements for GCP Checkpoints
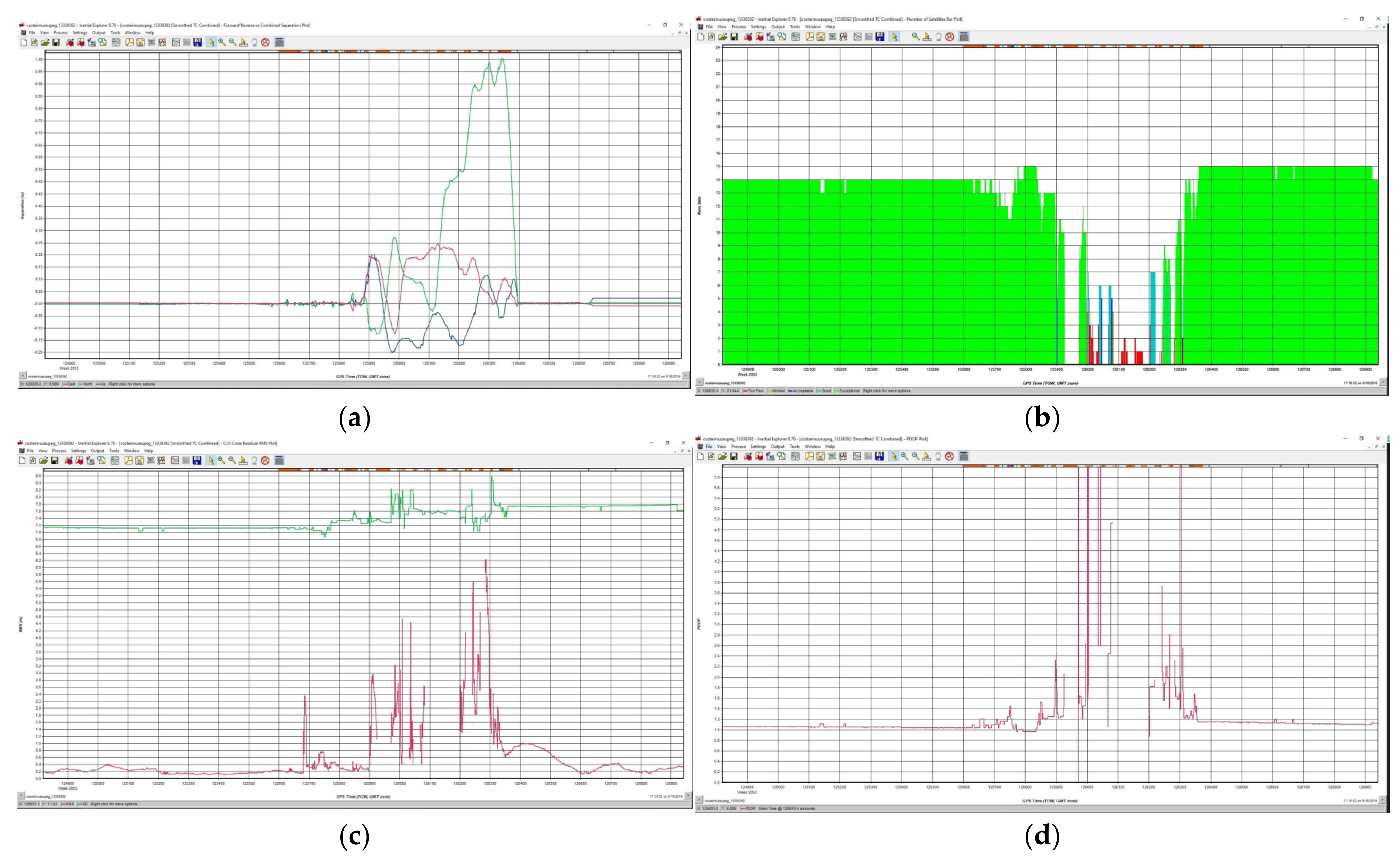
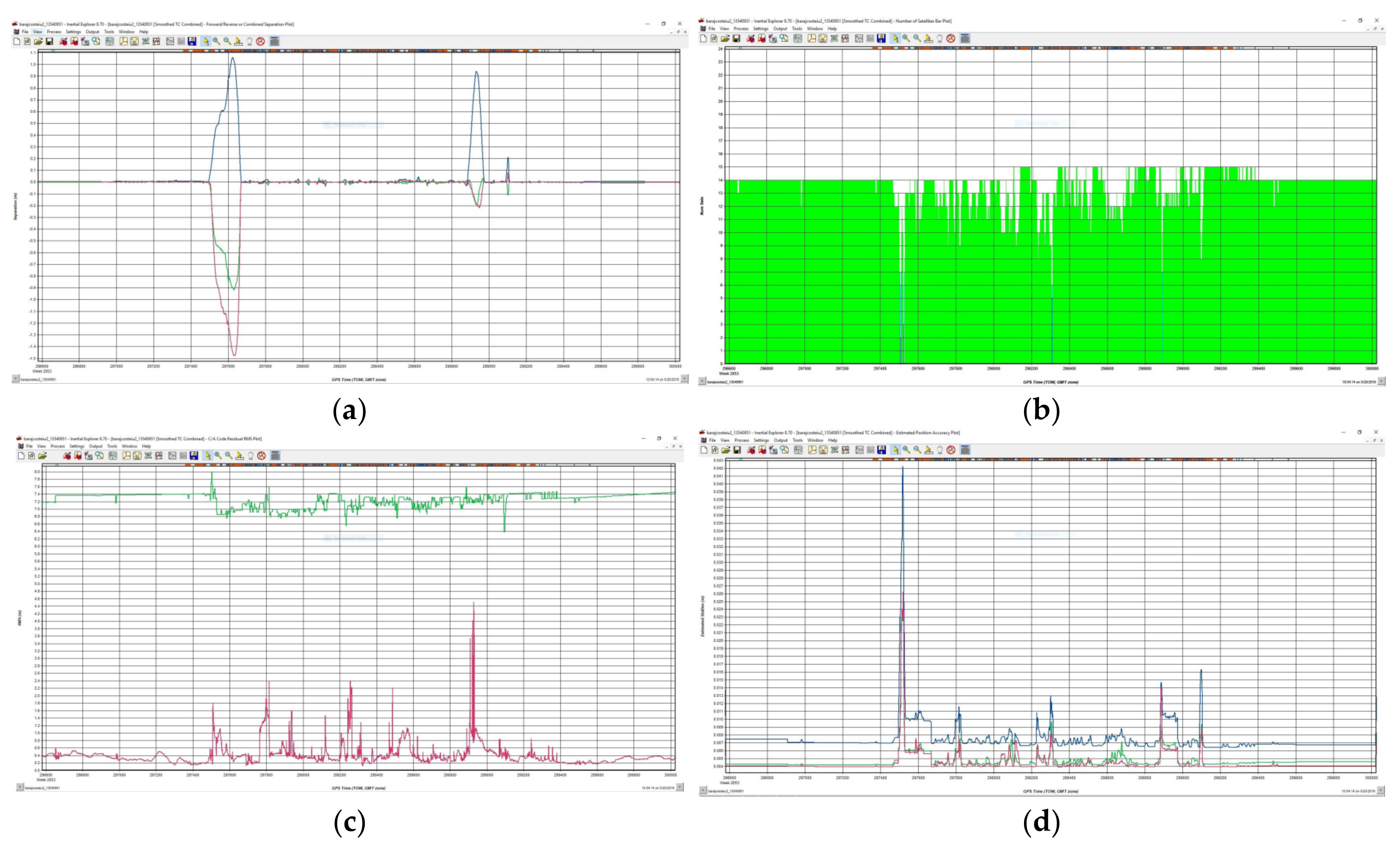
3.1.1. Acquisition and Processing of Rinex Data
3.1.2. Postprocessing Data and Presentation of Obtained Results
3.2. Data Acquisition and Processing Using UAV Technology in the Studied Facilities
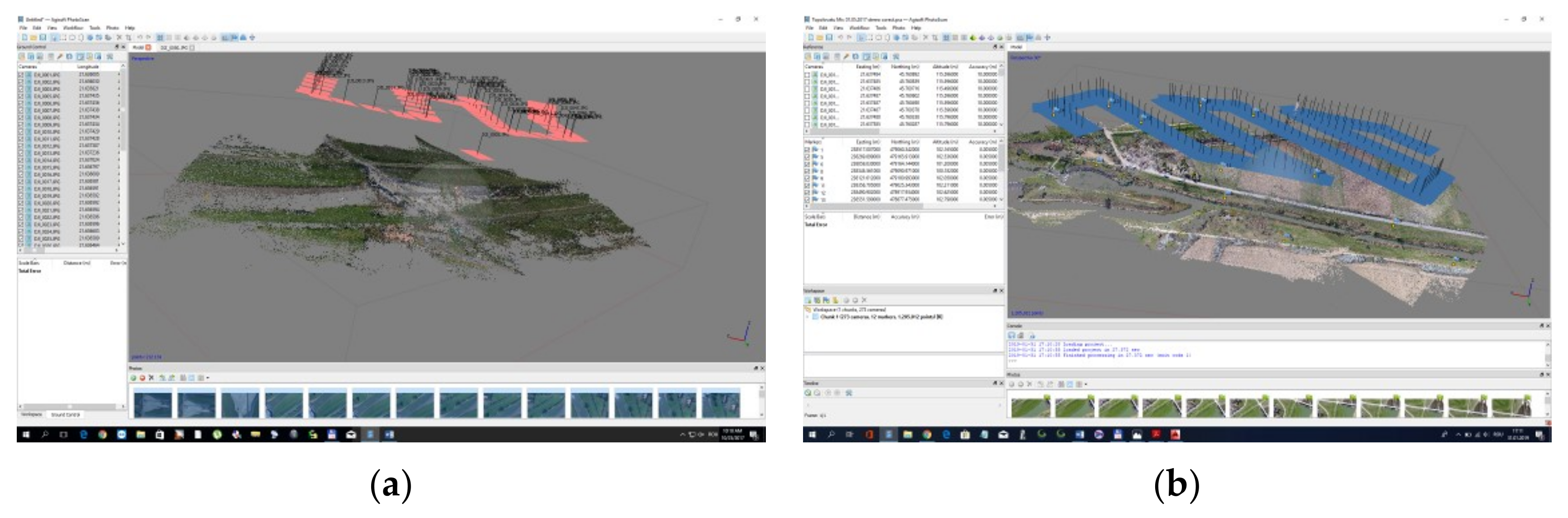
3.2.1. Photogrammetric Data Processing
3.2.2. Developing the Digital Elevation Model
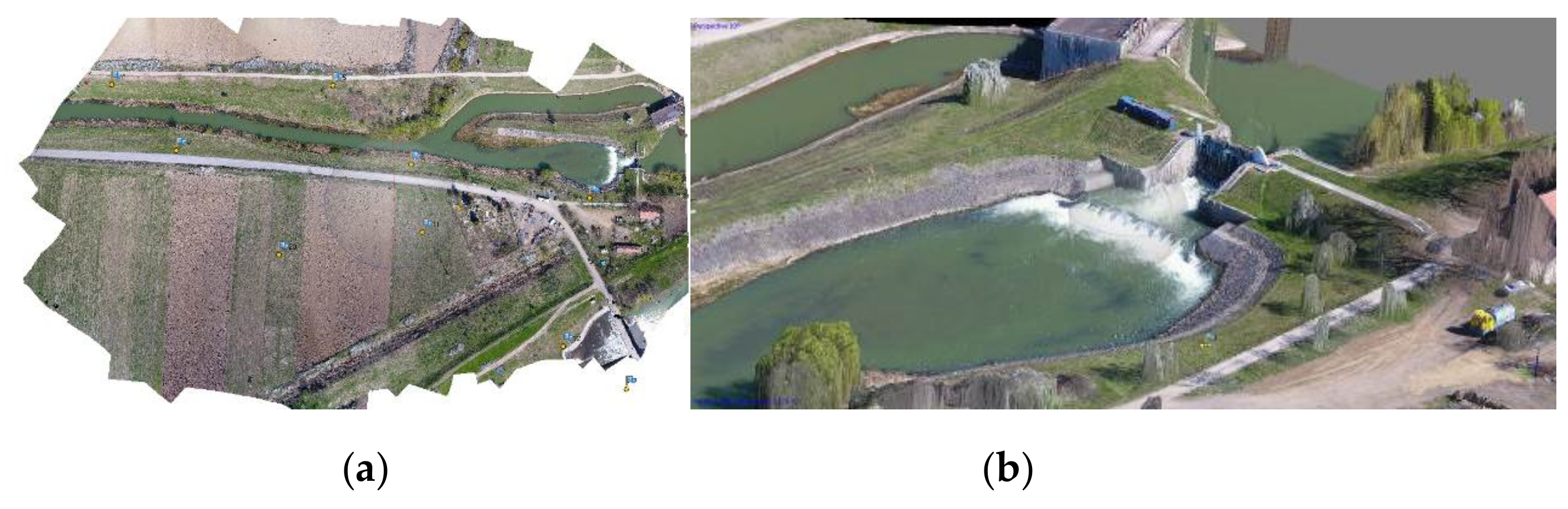
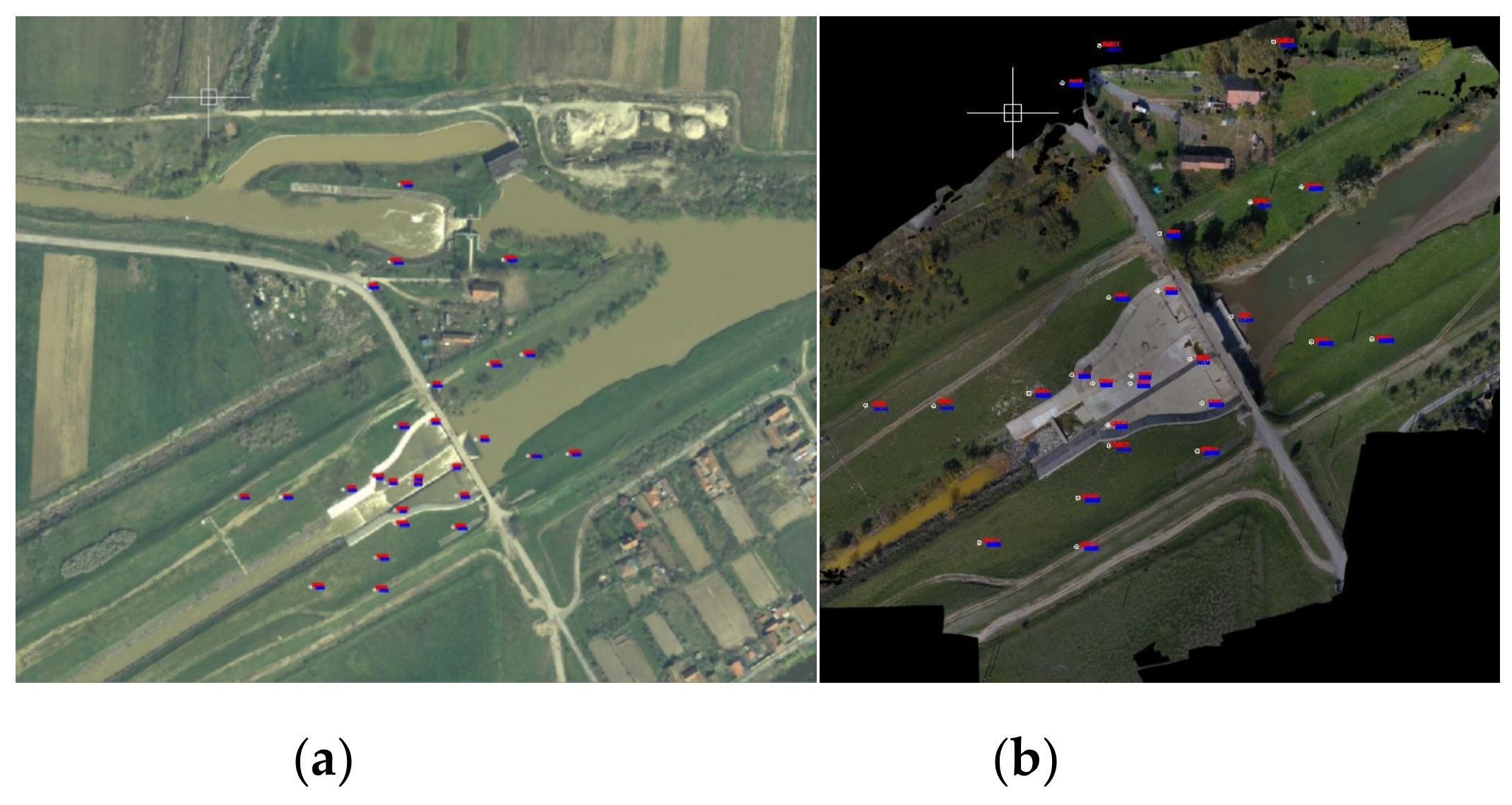
3.2.3. Orthomosaic and Orthophotoplane Production
3.3. GIS Data Acquisition and Processing Using TLS Technology
3.3.1. TLS Data Acquisition
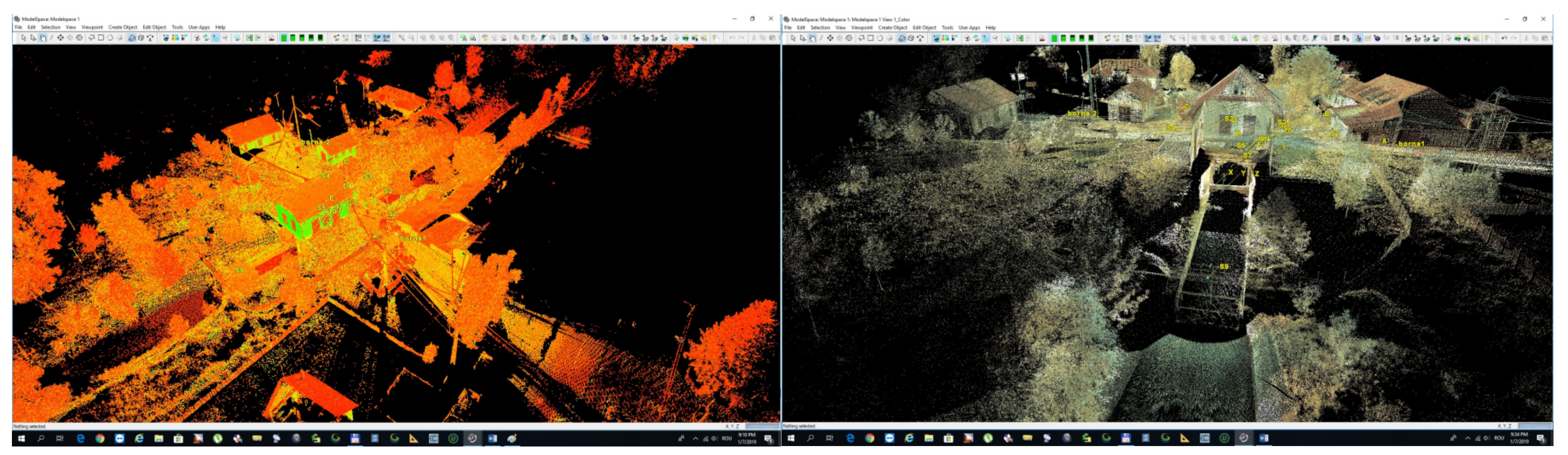
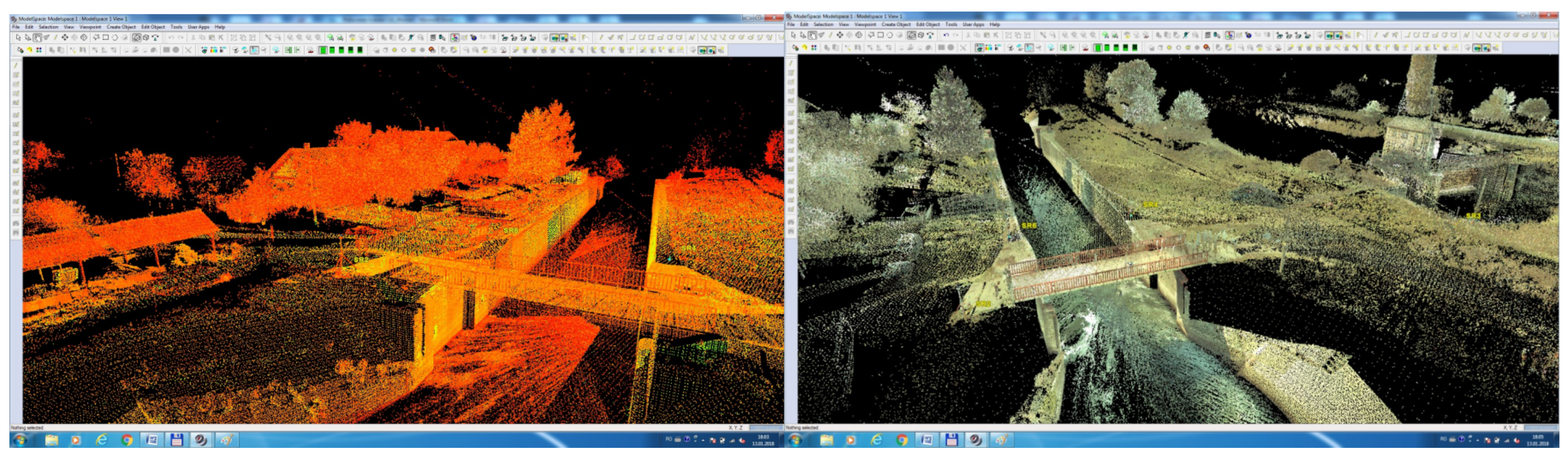
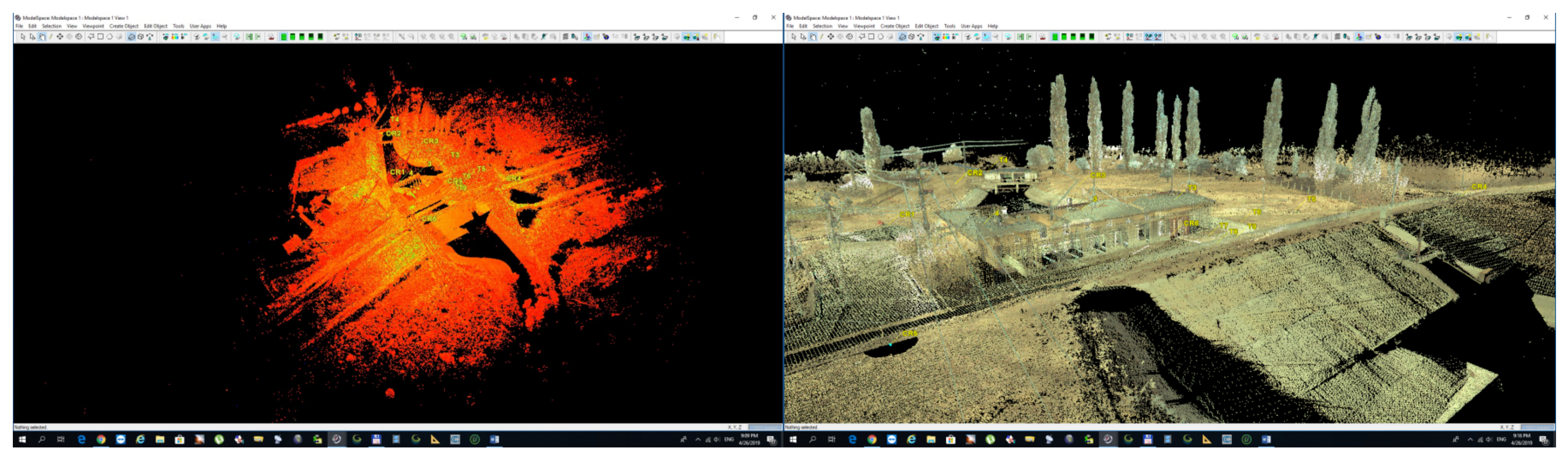
3.3.2. Data Processing and Obtaining 3D Point Clouds
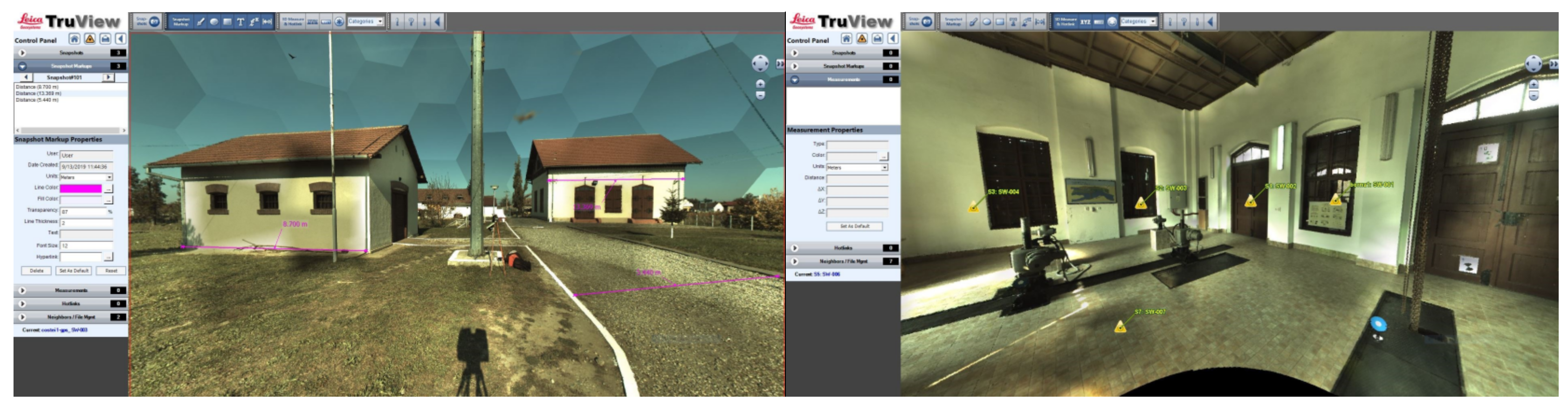
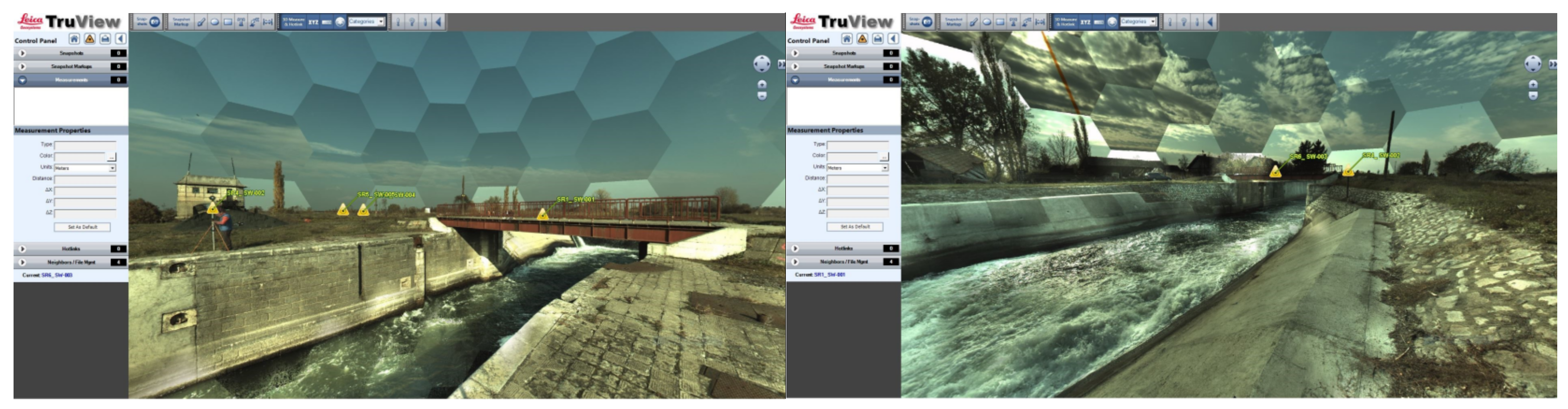
3.3.3. Making the Virtual Tour (TruView)
3.4. GIS Data Acquisition and Processing Using Mobile LiDAR Technology (MMS)
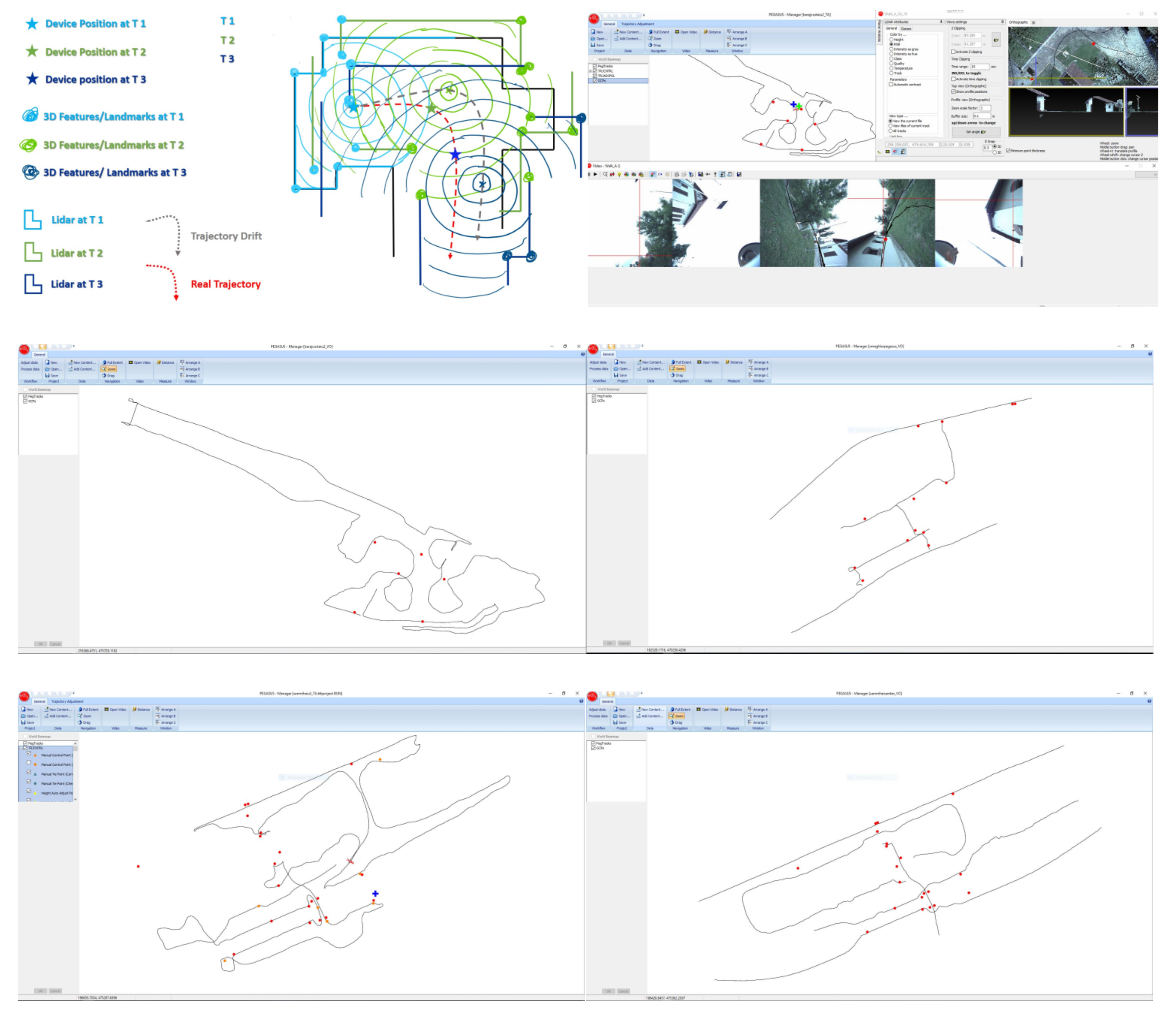
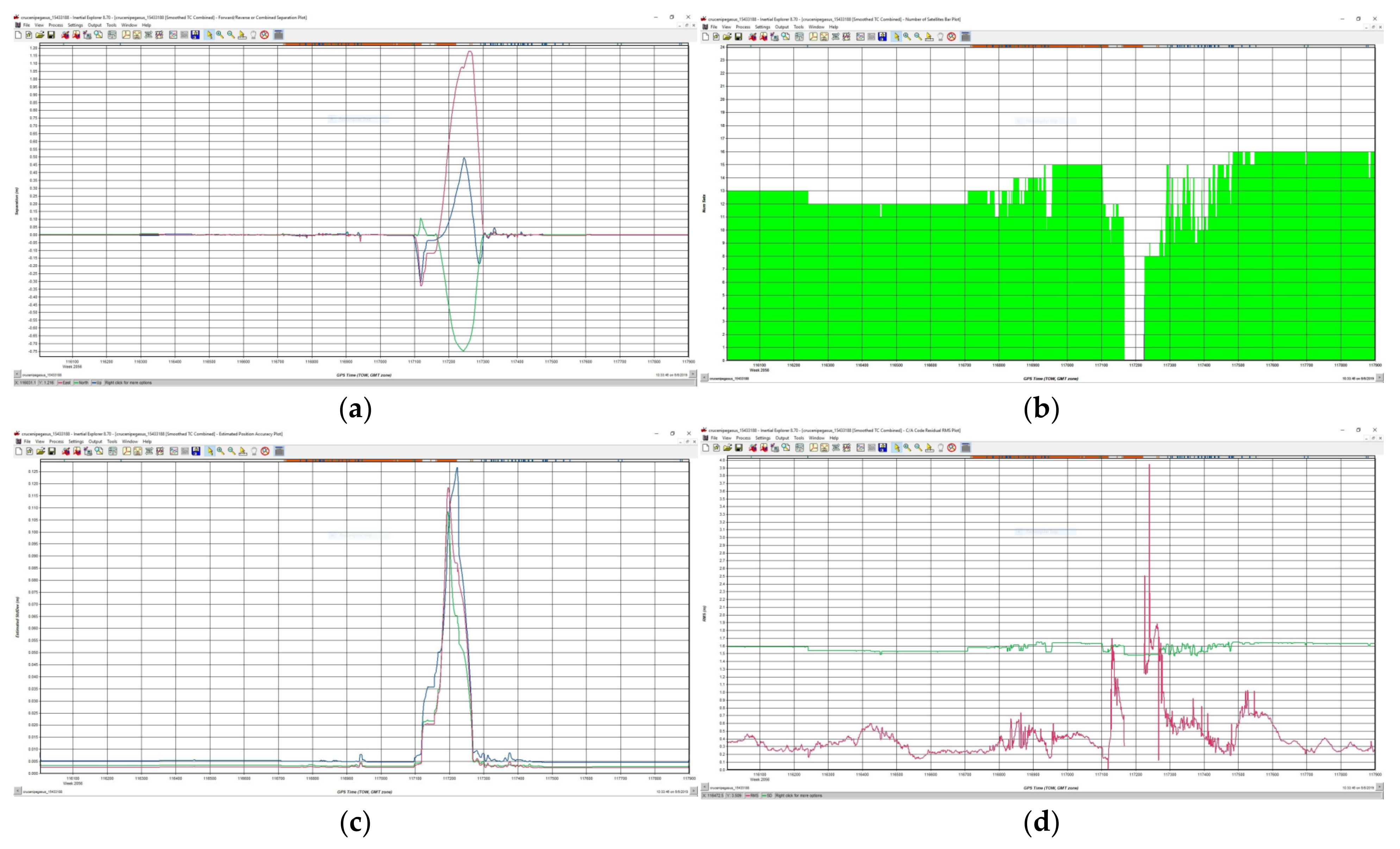
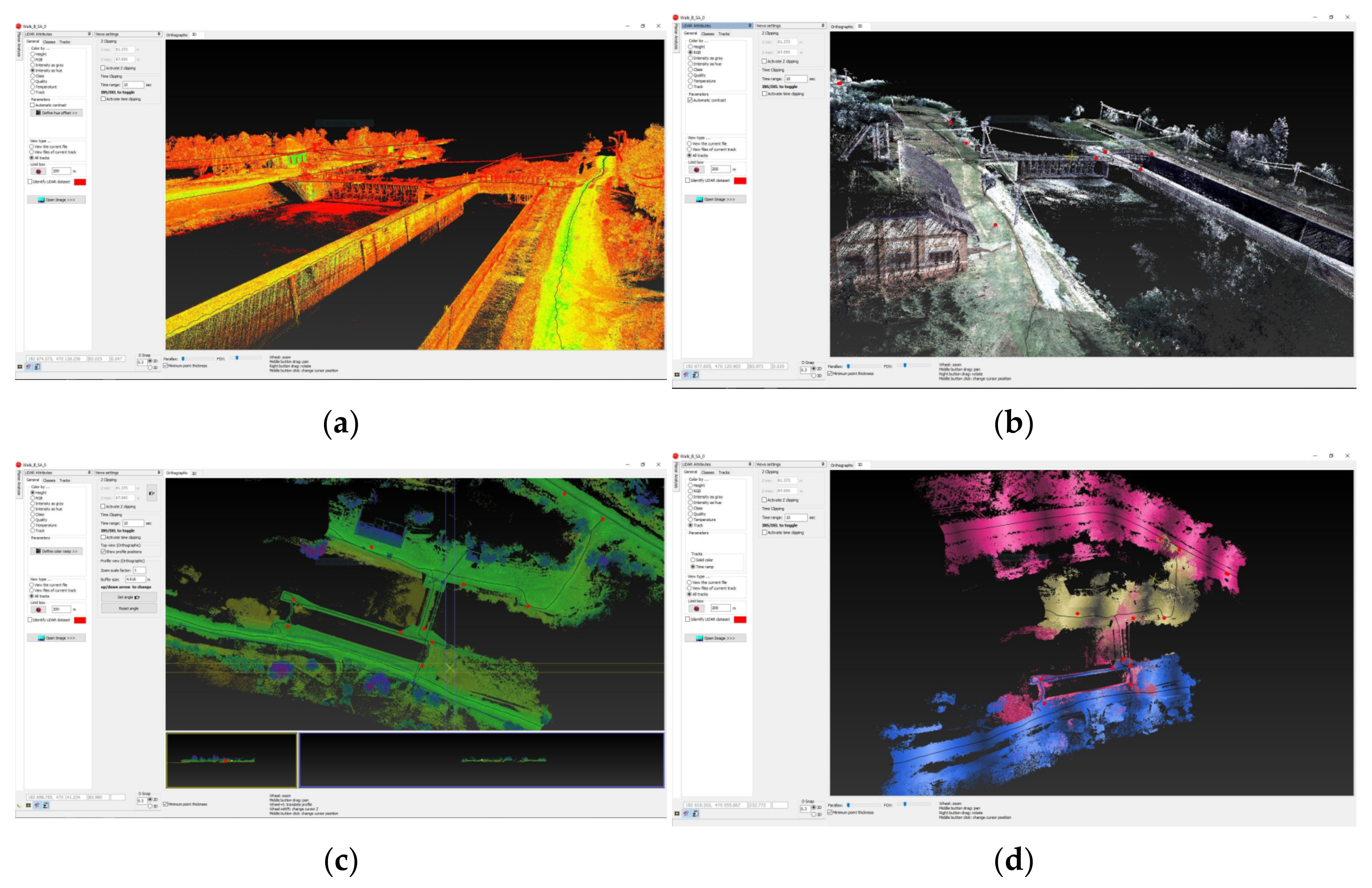
3.4.1. Pre-Processing of LiDAR Data and Data Visualization in QC Tools
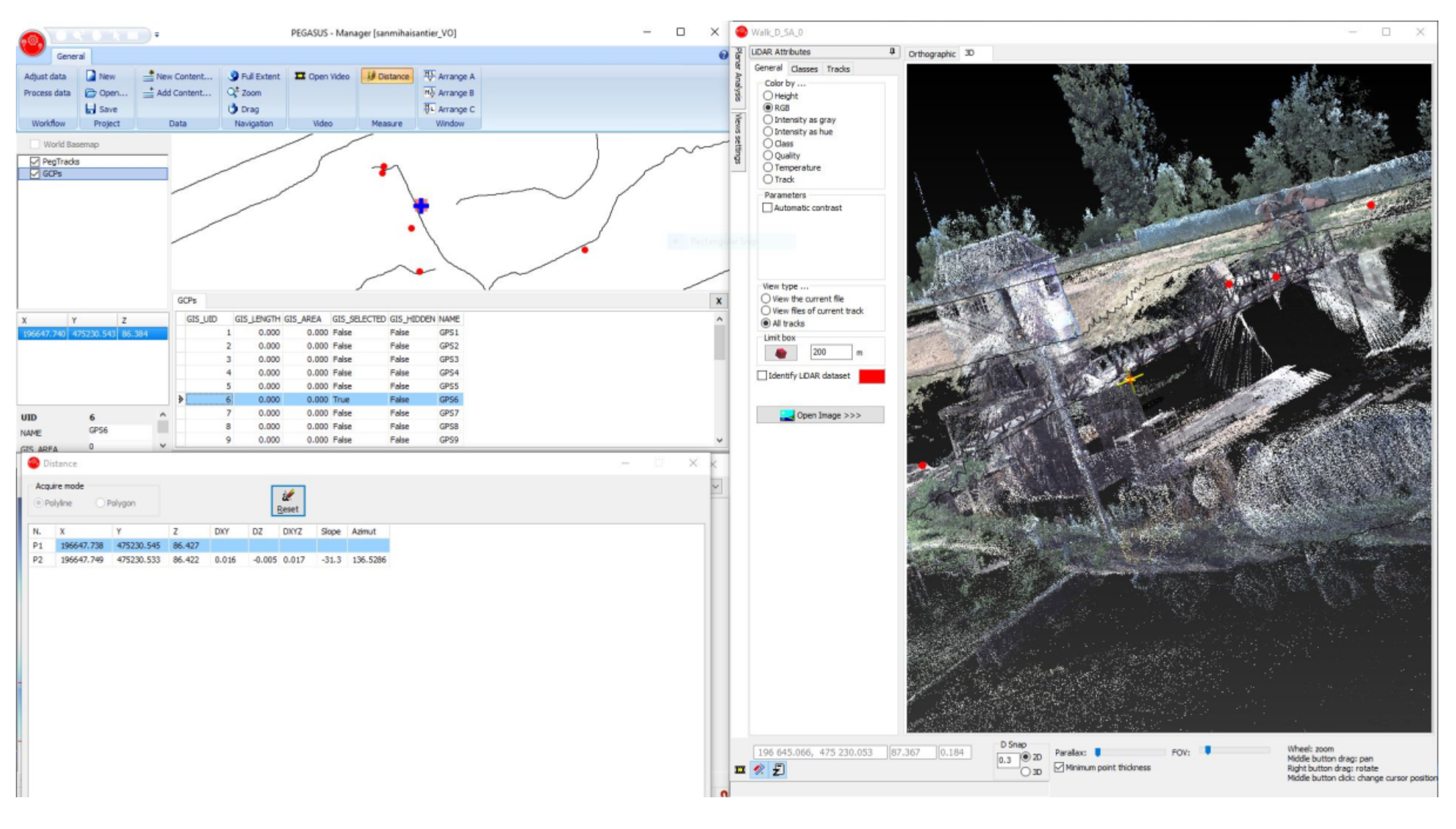
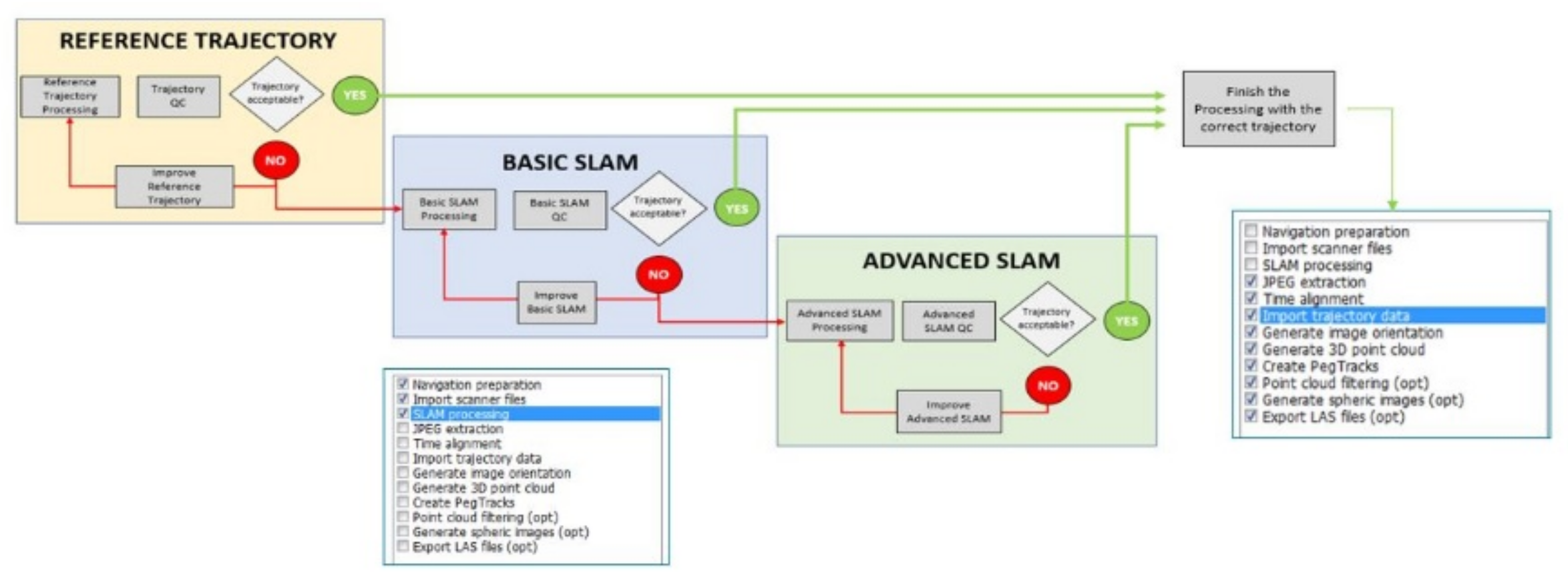
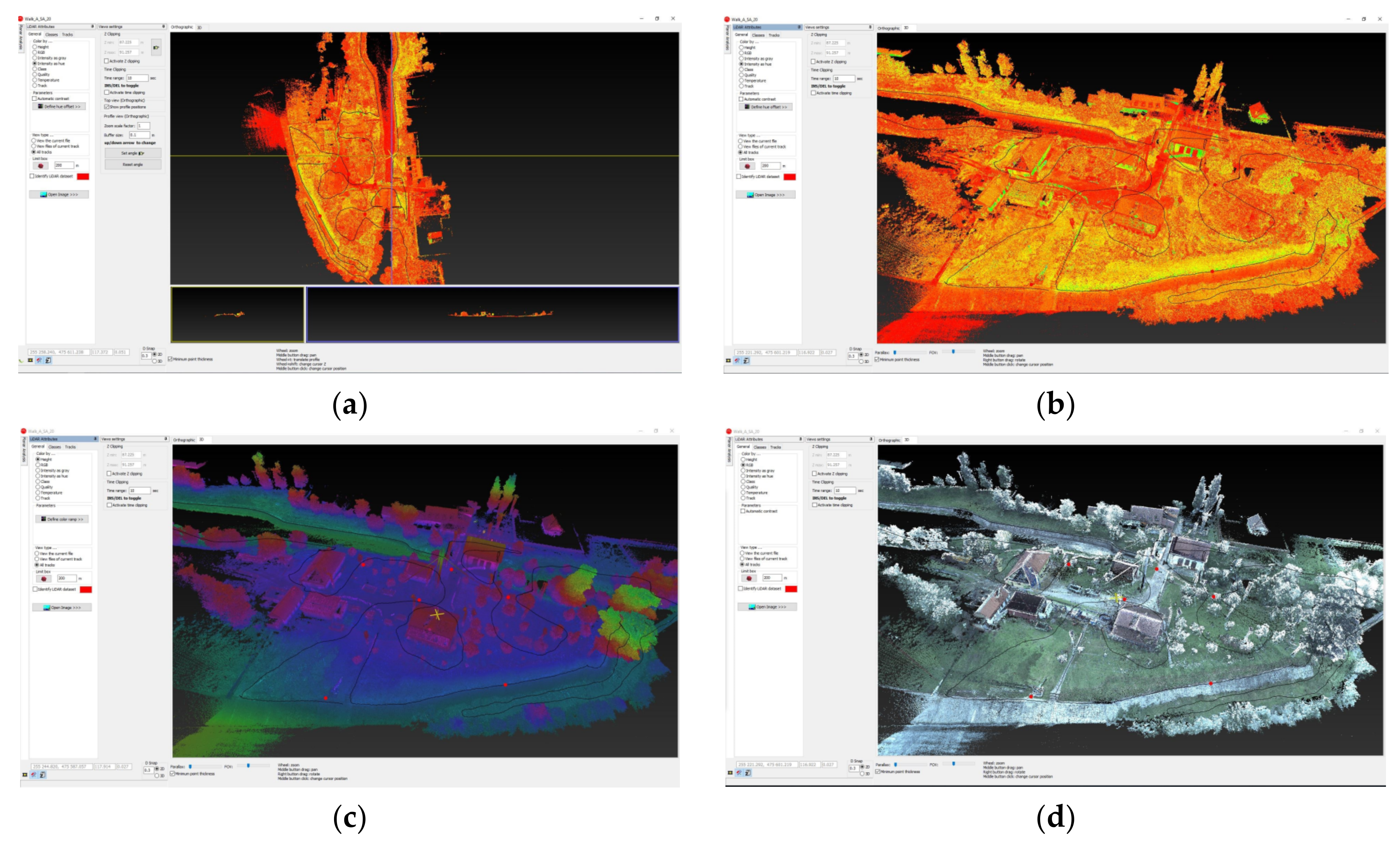
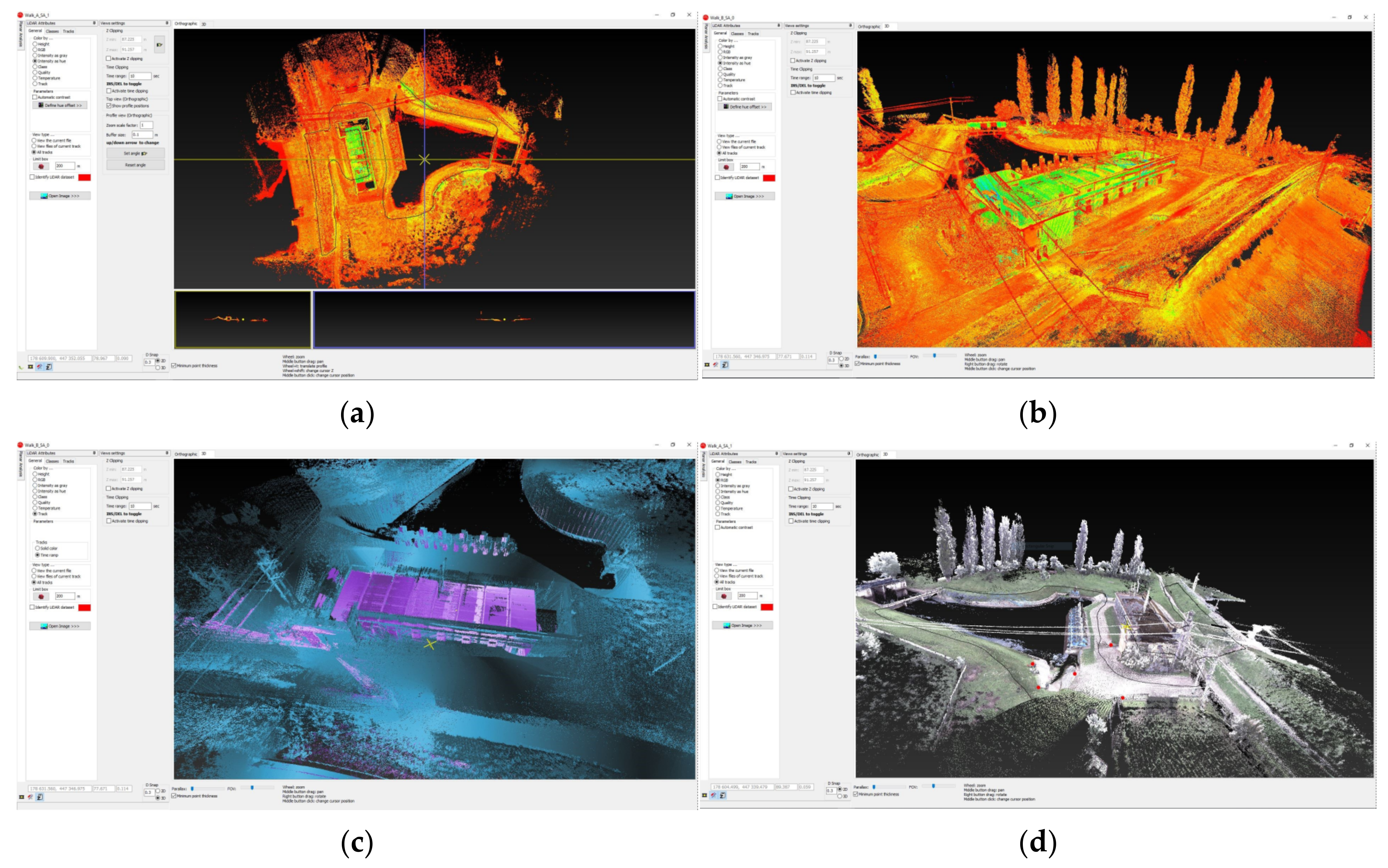
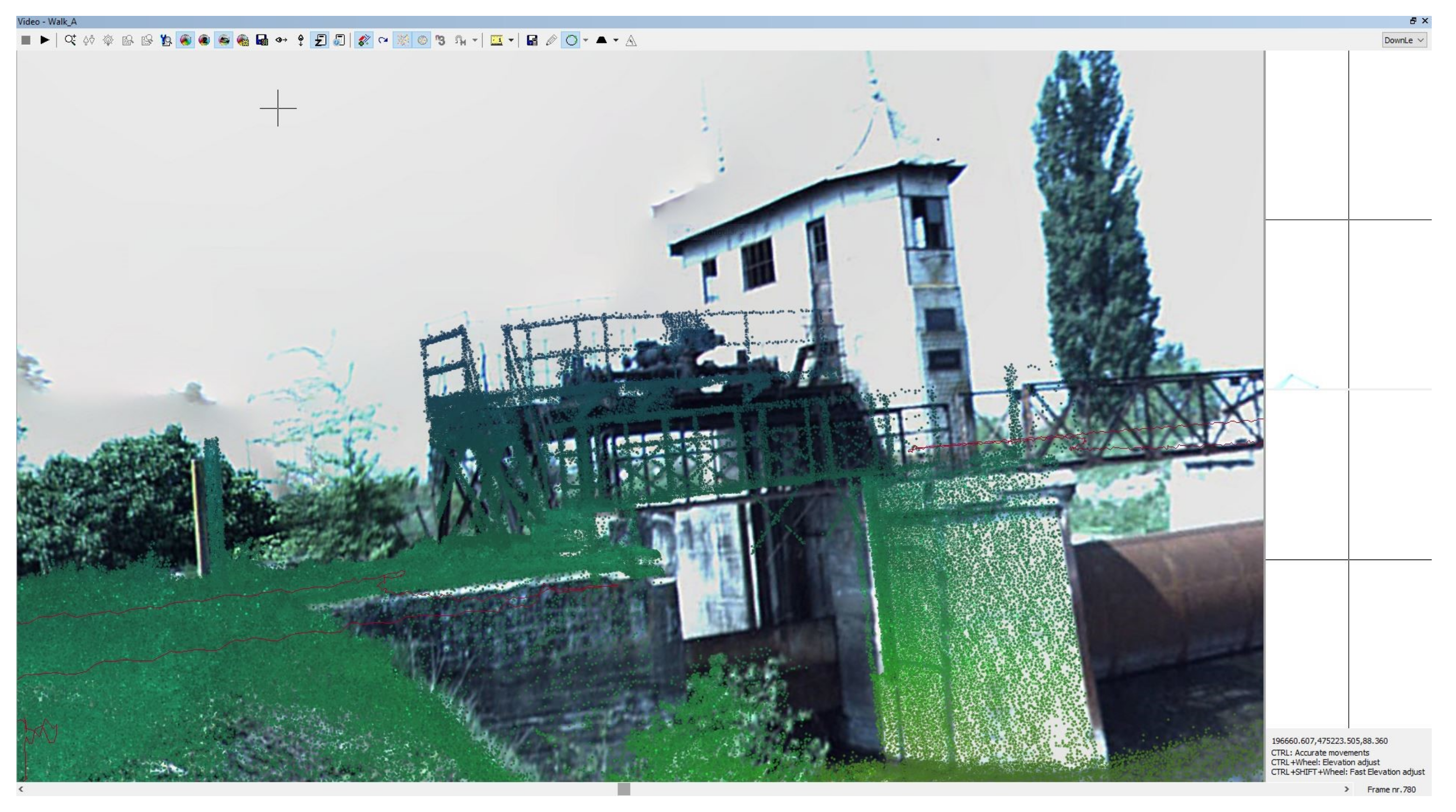
3.4.2. Data Processing in Pegasus Manager and Obtaining Point Clouds
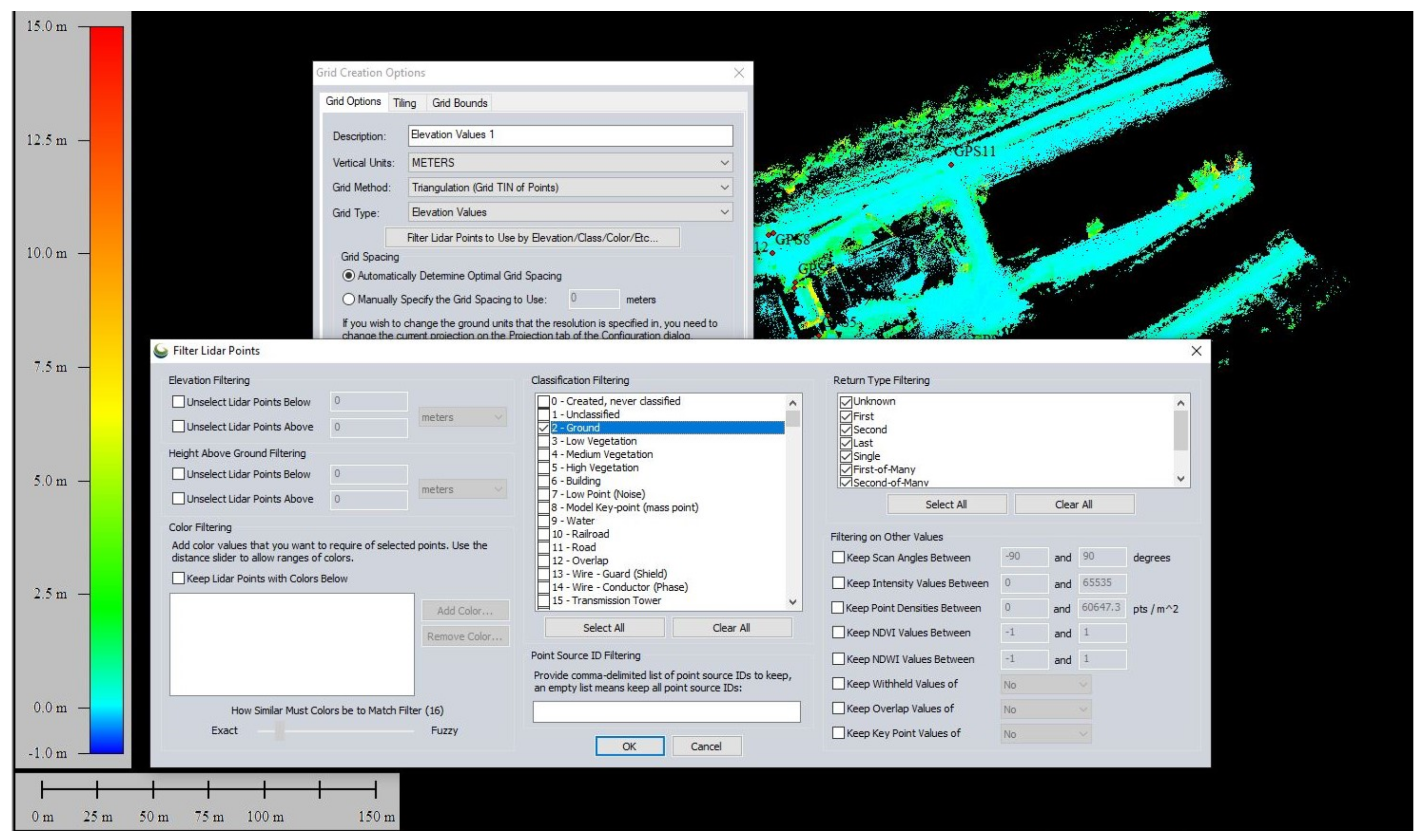
3.4.3. LiDAR Data Processing in ArcGIS—Leica Pegasus: MapFactory
3.5. Comparison of TLS—MMS Data
3.6. Comparing UAV-TLS-MMS Data
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Resop, J.P.; Lehmann, L.; Hession, W.C. Drone Laser Scanning for Modeling Riverscape Topography and Vegetation: Comparison with Traditional Aerial LiDAR. Drones 2019, 3, 35. [Google Scholar] [CrossRef] [Green Version]
- Mielcarek, M.; Kamińska, A.; Stereńczak, K. Digital Aerial Photogrammetry (DAP) and Airborne Laser Scanning (ALS) as Sources of Information about Tree Height: Comparisons of the Accuracy of Remote Sensing Methods for Tree Height Estimation. Remote Sens. 2020, 12, 1808. [Google Scholar] [CrossRef]
- Beilicci, E.; David, I.; Beilicci, R.; Visescu, M. Mathematical model for calculation of soil loss on watershed slopes. Environ. Eng. Manag. J. 2017, 16, 2211–2218. [Google Scholar] [CrossRef]
- Iordan, D. The Application of Laser Technologies to the Topographic Stage of the Someș-Tisa Hydrographic Basin. Ph.D. Thesis, University of Bucharest, Bucharest, Romania, 2014; p. 1. [Google Scholar]
- Available online: https://www.ghd.com/en/perspectives/how-3d-laser-scanning-is-changing-the-engineering-landscape.aspx (accessed on 15 May 2021).
- Gerald, F.M. Handbook of Optical and Laser Scanning; Marcel Dekker, University of Rochester, Inc.: New York, NY, USA, 2004. [Google Scholar]
- Ebrahim, M.A.B. 3D Laser Scanners: History, Applications and Future. Ph.D. Thesis, Faculty of Enginnering Assiut University, Asyut, Egypt, 2011. [Google Scholar]
- Savu, A.; Caius, D.; Cornelia, B.A.; Gheorghe, B. Laser Scanning Airborne Systems—A New Step in Engineering Surveying. In Proceedings of the 11th WSEAS International Conference on Sustainability in Science Engineering SSE, Timisoara, Romania, 27–29 May 2009; Volume 9, pp. 27–29. [Google Scholar]
- Qiu, Q.; Wang, M.; Xie, Q.; Han, J.; Zhou, X. Extracting 3D Indoor Maps with Any Shape Accurately Using Building Information Modeling Data. ISPRS Int. J. Geo-Inf. 2021, 10, 700. [Google Scholar] [CrossRef]
- De Antero, K.; Kaartinen, H.; Virtanen, J.P. Laser Scanner in a Backpack; GIM International: Masala, Finland, 2016; Volume 30, pp. 16–19. [Google Scholar]
- Riley, P.; Crowe, P. Airborne and Terrestrial Laser Scanning—Applications for Illawarra Coal. In Proceedings of the Coal Operators’ Conference, Wollongong, Australia, 18–20 February 2006; pp. 266–275. [Google Scholar]
- Abdelhafiz, A. Integrating Digital Photogrammetry and Terrestrial Laser Scanning. Ph.D Thesis, Braunschweig, Technischen Universität Braunschweig, Braunschweig, Germany, 2009. ISBN 3-926146-18-4. [Google Scholar]
- Di Stefano, F.; Chiappini, S.; Gorreja, A.; Balestra, M.; Pierdicca, R. Mobile 3D scan LiDAR: A literature review. Geomat. Nat. Hazards Risk 2021, 12, 2387–2429. [Google Scholar] [CrossRef]
- Smits, J.; Confalone, G.; Kinnare, T. What Is the Difference between Laser Radar and LiDAR Technology? ECM, Global Measurament Solution: Topsfield, MA, USA, 2022. [Google Scholar]
- Rusu, G.; Herban, I.S.; Bălă, A.C.; Grecea, C. Mathematical support for three-dimensional transformation points from geocentric reference system in local reference system. AIP Conf. Proc. 2015, 1648, 670011. [Google Scholar]
- Kwan, M.P.; Ransberger, D.M. LiDAR assisted emergency response: Detection of transport network obstructions caused by major disasters. Comput. Environ. Urban Sys. 2010, 34, 179–188. [Google Scholar] [CrossRef]
- Hol, J. Sensor Fusion and Calibration of Inertial Sensors, Vision, UltraWideband and GPS. Linköping Studies in Science and Technology. Ph.D. Thesis, Linköping University, Linköping, Sweden, 2011. [Google Scholar]
- Strasdat, H.; Montiel, J.M.M.; Davison, A.J. Real-time monocular SLAM: Why filter? In Proceedings of the IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–7 May 2010. [Google Scholar]
- Tardif, J.P.; George, M.; Laverne, M. A new approach to vision-aided inertial navigation. In Proceedings of the IEEE/RSJ International Conference, Intelligent Robots and Systems (IROS), Taipei, Taiwan, 18–22 October 2010. [Google Scholar]
- Velodyne. The Velodyne High Definition LiDAR; Velodyne: San Jose, CA, USA, 2014. [Google Scholar]
- Leica Pegasus Backpack Technical Sheet. Available online: http://www.topgeocart.ro/platforme-mobile/leica-pegasusbackpack_97.html (accessed on 5 June 2022).
- Thrun, S.; Leonard, J.J. Simultaneous Localization and Mapping. In Siciliano, B., Khatib, O. Handbook of Robotics; Springer: Berlin/Heidelberg, Germany, 2008. [Google Scholar] [CrossRef] [Green Version]
- Grecea, C.; Herban, I.S.; Vilceanu, C.B. WebGIS solution for urban planning strategies. Procedia Eng. 2016, 161, 1625–1630. [Google Scholar] [CrossRef] [Green Version]
- Lo Bruto, M.; Borruso, A.; D’Argenio, A. UAV System for photogrammetric data acquisition of archeological sites. Int. J. Herit. Digit. Era 2012, 1, 7–13. [Google Scholar] [CrossRef] [Green Version]
- Li, J.; Knapp, D.E.; Lyons, M.; Roelfsema, C.; Phinn, S.; Schill, S.R.; Asner, G.P. Automated Global Shallow Water Bathymetry Mapping Using Google Earth Engine. Remote Sens. 2021, 13, 1469. [Google Scholar] [CrossRef]
- Șmuleac, A.; Șmuleac, L.; Man, T.E.; Popescu, C.A.; Imbrea, F.; Radulov, I.; Adamov, T.; Pașcalău, R. Use of Modern Technologies for the Conservation of Historical Heritage in Water Management. Water 2020, 12, 2895. [Google Scholar] [CrossRef]
- Dunea, D.; Bretcan, P.; Tanislav, D.; Serban, G.; Teodorescu, R.; Iordache, S.; Petrescu, N.; Tuchiu, E. Evaluation of Water Quality in Ialomita River Basin in Relationship with Land Cover Patterns. Water 2020, 12, 735. [Google Scholar] [CrossRef] [Green Version]
- Burghelea, B.; Bănăduc, D.; Bănăduc, A. The Timiş River Basin (Banat, Romania) Natural and Anthropogenic Elements. A Study Case—Management Chalenges. Transylv. Rev. Syst. Ecol. Res. 2013, 15, 173–206. [Google Scholar] [CrossRef]
- Tommaselli, A.M.G.; Moraes, M.V.A.; Silva, L.S.L.; Rubio, M.F.; Carvalho, G.J.; Tommaselli, J.T.G. Monitoring marginal erosion in hydroelectric reservoirs with terrestrial mobile Laser scanner. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. XL 2014, 5, 589–596. [Google Scholar] [CrossRef] [Green Version]
- Şmuleac, L.; Rujescu, C.; Șmuleac, A.; Imbrea, F.; Radulov, I.; Manea, D.; Ienciu, A.; Adamov, T.; Pașcalău, R. Impact of Climate Change in the Banat Plain, Western Romania, on the Accessibility of Water for Crop Production in Agriculture. Agriculture 2020, 10, 437. [Google Scholar] [CrossRef]
- Micek, O.; Feranec, J.; Stych, P. Land Use/Land Cover Data of the Urban Atlas and the Cadastre of Real Estate: An Evaluation Study in the Prague Metropolitan Region. Land 2020, 9, 153. [Google Scholar] [CrossRef]
- Bilașco, Ș.; Roșca, S.; Vescan, I.; Fodorean, I.; Dohotar, V.; Sestras, P. A GIS-Based Spatial Analysis Model Approach for Identification of Optimal Hydrotechnical Solutions for Gully Erosion Stabilization. Case Study. Appl. Sci. 2021, 11, 4847. [Google Scholar] [CrossRef]
- IWA Publishing. Water Supply; IWA Publishing: London, UK, 2022. [Google Scholar]
- Depetris, P.J. The Importance of Monitoring River Water Discharge, Frontiers in Water. Front. Water 2021, 3, 745912. [Google Scholar] [CrossRef]
- Drăghici, I.A.; Rus, I.D.; Cococeanu, A.; Muntean, S. Improved Operation Strategy of the Pumping System Implemented in Timisoara Municipal Water Treatment Station. Sustainability 2022, 14, 9130. [Google Scholar] [CrossRef]
- Radutu, A.; Luca, O.; Gogu, C.R. Groundwater and Urban Planning Perspective. Water 2022, 14, 1627. [Google Scholar] [CrossRef]
- Olaru, M. A history of about 300 years of high waters and hydrotechnic constructions in Banat (I). Rev. Hist. Geogr. Toponomast. 2006, I, 89–106. [Google Scholar]
- Tyszewska, P.D. Water Management Balance as a Tool for Analysis of a River Basin with Conflicting Environmental and Navigational Water Demands: An Example of the Warta Mouth National Park, Poland. Water 2021, 13, 3628. [Google Scholar] [CrossRef]
- Oniga, V.E.; Breaban, A.I.; Pfeifer, N.; Diac, M. 3D Modeling of Urban Area Based on Oblique UAS Images—An End-to-End Pipeline. Remote Sens. 2022, 14, 422. [Google Scholar] [CrossRef]
- Skrzypczak, I.; Kokoszka, W.; Zientek, D.; Tang, Y.; Kogut, J. Landslide Hazard Assessment Map as an Element Supporting Spatial Planning: The Flysch Carpathians Region Study. Remote Sens. 2021, 13, 317. [Google Scholar] [CrossRef]
- Paudel, S.; Benjankar, R. Integrated Hydrological Modeling to Analyze the Effects of Precipitation on Surface Water and Groundwater Hydrologic Processes in a Small Watershed. Hydrology 2022, 9, 37. [Google Scholar] [CrossRef]
- Man, T.E.; Blenesi, D.A.; Constantinescu, L. Technical solutions to create esthetical civil engineering structures using the geosynthetics materials. Ann. Food Sci. Technol. 2010, 11, 111–117. [Google Scholar]
- Salmoral, G.; Rivas Casado, M.; Muthusamy, M.; Butler, D.; Menon, P.P.; Leinster, P. Guidelines for the Use of Unmanned Aerial Systems in Flood Emergency Response. Water 2020, 12, 521. [Google Scholar] [CrossRef] [Green Version]
- Man, T.E.; Armas, A.; Beilicci, R.; Beilicci, E. Assessment Regarding the Evolution in Time (1980–2014) of Drought on the Basis of Several Computation Indexes: Study Case Timisoara. Nat. Resour. Sustain. Dev. 2018, 8. [Google Scholar] [CrossRef]
- Dunca, A.M. Water Resources in the Timiş-Bega Hydrographic System: Genesis, Hydrological Regime and Water Risks; Editura Universităţii de Vest: Timisoara, Romania, 2016; ISBN 978-973-125-519-4. [Google Scholar]
- Cioffi, F.; De Bonis Trapella, A.; Giannini, M.; Lall, U. A Flood Risk Management Model to Identify Optimal Defence Policies in Coastal Areas Considering Uncertainties in Climate Projections. Water 2022, 14, 1481. [Google Scholar] [CrossRef]
- Khan, M.Y.A.; ElKashouty, M.; Subyani, A.M.; Tian, F. Flash Flood Assessment and Management for Sustainable Development Using Geospatial Technology and WMS Models in Abha City, Aseer Region, Saudi Arabia. Sustainability 2022, 14, 10430. [Google Scholar] [CrossRef]
- Available online: https://en.unesco.org/themes/water-security/hydrology/programmes/whymap (accessed on 3 February 2021).
- Elhashash, M.; Albanwan, H.; Qin, R. A Review of Mobile Mapping Systems: From Sensors to Applications. Sensors 2022, 22, 4262. [Google Scholar] [CrossRef]
- TransDatRO. Available online: https://cngcft.ro/index.php/ro/download (accessed on 13 July 2022).
- Remondino, F.; Spera, M.G.; Nocerino, E.; Menna, F.; Nex, F. State of the art in high density image matching. Photogramm. Rec. 2014, 29, 144–166. [Google Scholar] [CrossRef]
- Yu, J.J.; Kim, D.W.; Lee, E.J.; Son, S.W. Determining the Optimal Number of Ground Control Points for Varying Study Sites through Accuracy Evaluation of Unmanned Aerial System-Based 3D Point Clouds and Digital Surface Models. Drones 2020, 4, 49. [Google Scholar] [CrossRef]
- Elkhrachy, I. 3D Structure from 2D Dimensional Images Using Structure from Motion Algorithms. Sustainability 2022, 14, 5399. [Google Scholar] [CrossRef]
- Herban, I.S.; Rusu, G.; Grecea, O.; Birla, G.A. Using the laser scanning for research and conservation of cultural heritage sites. Case study: Ulmetum Citadel. J. Environ. Prot. Ecol. 2014, 15, 1172–1180. [Google Scholar]
- Calin, M.; Damian, G.; Popescu, T.; Manea, R.; Erghelegiu, B.; Salagean, T. 3D Modeling for Digital Preservation of Romanian Heritage Monuments. Agric. Agric. Sci. Procedia 2015, 6, 421–428. [Google Scholar] [CrossRef] [Green Version]
- Zhao, L.; Li, N.; Li, L.; Zhang, Y.; Cheng, C. Real-Time GNSS-Based Attitude Determination in the Measurement Domain. Sensors 2017, 17, 296. [Google Scholar] [CrossRef]
- Available online: https://store.dji.com/product/phantom-4-pro (accessed on 25 March 2021).
- Available online: https://novatel.com (accessed on 12 December 2020).
- Global Mapper v.20; Blue Marble, Maine, USA, Geographics. Available online: https://www.bluemarblegeo.com/global-mapper/ (accessed on 18 November 2020).
- CloudCompare 3D Point Cloud and Mesh Processing Software; Open Source. Available online: http://www.cloudcompare.org/ (accessed on 3 October 2020).
- Available online: https://leica-geosystems.com/products/mobile-mapping-systems/capture-platforms/leica-pegasus-backpack (accessed on 12 December 2021).
- Available online: https://rentals.leica-geosystems.com/support/7AAAF268-5056-8236-9A2F67975423FC85.pdf (accessed on 25 December 2021).
- Available online: http://expertconsulting.ro/the-repairing-of-navigation-infrastructure-on-bega-canal/ (accessed on 23 July 2022).




































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. Crt. | Master Station | Type | B [m] | L [m] | He [m] |
|---|---|---|---|---|---|
| 1 | H NCoşteiu | FENO Terminal | 45°44′10.90829″ N | 21°51′07.31158″ E | 157.481 |
| 2 | Cruceni pumps | FENO Terminal | 45°27′05.562528″ N | 20°53′15.953888″ E | 120.995 |
| 3 | HN Sânmartinu Maghiar | Metal bolt | 45°39′26.63270″ N | 20°55′28.31293″ E | 126.516 |
| Objective | Name | X (m) | Y (m) | Z (m) |
|---|---|---|---|---|
| HN Coşteiu | Master_SR1 | 475,565.920 | 255,206.307 | 114.399 |
| 1RTK | 475,558.675 | 255,259.001 | 114.607 | |
| 2RTK | 475,591.581 | 255,275.722 | 116.604 | |
| 3RTK | 475,610.997 | 255,258.163 | 116.986 | |
| 4RTK | 475,596.074 | 255,240.448 | 116.822 | |
| 4RTK | 475,620.283 | 255,221.991 | 116.501 | |
| HN Sânmihaiu Român | Master_SR1 | 475,209.986 | 196,699.310 | 84.695 |
| GPS1 | 475,180.393 | 196,683.443 | 86.942 | |
| GPS2 | 475,178.302 | 196,678.649 | 86.940 | |
| GPS12 | 475,267.737 | 196,623.461 | 86.615 | |
| GPS13 | 475,266.853 | 196,621.210 | 86.610 | |
| GPS14 | 475,213.282 | 196,711.086 | 84.727 | |
| GPS20 | 475,193.586 | 196,719.979 | 84.712 | |
| Cruceni pumping station | Master_SR1 | 447,352.270 | 178,587.621 | 77.771 |
| GPS1 | 447,343.822 | 178,583.799 | 77.941 | |
| GPS2 | 447,343.710 | 178,593.625 | 77.576 | |
| GPS3 | 447,330.955 | 178,596.606 | 77.627 | |
| GPS4 | 447,349.065 | 178,611.745 | 77.509 | |
| H NSânmartinu Maghiar | Master_SM1 | 470,063.192 | 182,627.374 | 83.394 |
| GPSM1 | 470,066.158 | 182,631.739 | 83.382 | |
| GPSM2 | 470,100.617 | 182,696.315 | 83.356 | |
| GPSM13 | 470,078.430 | 182,624.035 | 83.391 |
| Hydrographic Basin | Basin Area (km2) | Length of the Network (km) | Main Course Length (km) |
|---|---|---|---|
| Aranca | 1080 | 328 | 114 |
| Old Bega | 2108 | 527 | 107 |
| Bega | 2362 | 892 | 170 |
| Timiş | 5673 | 1907 | 244 |
| Bârzava | 1202 | 355 | 127 |
| Moraviţa | 387 | 172 | 47 |
| Caraş | 1280 | 502 | 79 |
| Nera | 1380 | 574 | 124 |
| Tributaries of the Danube | |||
| (between Buziaş and Cerna) | 1091 | 530 | 123 |
| Cerna | 1360 | 524 | 79 |
| Name of Standing Station | Class | B [m] | L [m] | He [m] |
|---|---|---|---|---|
| Arad (ARAD) | A | 46°10′23.51004″ N | 21°20′ 40.51052″ E | 167.6742 m |
| Moldova Noua | A | 45°51′16.42753″ N | 22°10′ 37.78289″ E | 216.4898 m |
| Timişoara 1 (TIM1) | A | 45°46′47.65271″ N | 21°13′ 51.46281″ E | 154.7278 m |
| No.Pct | Point Class | Duration of Measurement | GNSS | Type of Measurement | Measuring Height |
|---|---|---|---|---|---|
| TIM1 | Control | 9h 59′55″ | GPS/GLONASS | Static | 0,0000 |
| MOLD | Control | 9h 59′55″ | GPS/GLONASS | Static | 0,0000 |
| FAGE | Control | 9h 59′55″ | GPS/GLONASS | Static | 0,0000 |
| TMIC2 | Measured | 2h 18′20″ | GPS/GLONASS | Static | 2,0000 |
| TMIC1 | Measured | 1h 52′49″ | GPS/GLONASS | Static | 2,0000 |
| TMIC3 | Measured | 1h 55′55″ | GPS/GLONASS | Static | 2,0000 |
| TMIC8 | Measured | 1h 23′30″ | GPS/GLONASS | Static | 2,0000 |
| TMIC9 | Measured | 1h 23′15″ | GPS/GLONASS | Static | 2,0000 |
| No.pct | Era 10/13/2017/hour | Status of Ambiguities | Type of Measurement | Solution | East | North |
|---|---|---|---|---|---|---|
| TMIC2 | 11:07:32 | not | Static | Float | 45°45′43.93254″ N | 21°38′08.85145″ E |
| TMIC2 | 11:07:32 | yes | Static | fixed all | 45°45′43.93126″ N | 21°38′08.84424″ E |
| TMIC2 | 11:07:32 | yes | Static | fixed all | 45°45′43.93198″ N | 21°38′08.84525″ E |
| TMIC1 | 13:32:07 | not | Static | Float | 45°45′42.05516″ N | 21°38′08.62780″ E |
| TMIC1 | 13:32:07 | yes | Static | fixed all | 45°45′42.05499″ N | 21°38′08.62696″ E |
| TMIC1 | 13:32:07 | yes | Static | fixed all | 45°45′42.05534″ N | 21°38′08.62661″ E |
| TMIC3 | 13:37:27 | not | Static | Float | 45°45′42.22913″ N | 21°38′12.53778″ E |
| TMIC3 | 13:37:27 | yes | Static | fixed all | 45°45′42.22745″ N | 21°38′12.53795″ E |
| TMIC3 | 13:37:27 | yes | Static | fixed all | 45°45′42.22853″ N | 21°38′12.53784″ E |
| TMIC8 | 13:44:42 | not | Static | Float | 45°45′36.81844″ N | 21°38′08.30090″ E |
| TMIC8 | 13:44:42 | yes | Static | fixed all | 45°45′36.81829″ N | 21°38′08.29966″ E |
| TMIC8 | 13:44:42 | yes | Static | fixed all | 45°45′36.81865″ N | 21°38′08.29931″ E |
| TMIC9 | 13:48:17 | not | Static | Float | 45°45′35.75665″ N | 21°38′09.21471″ E |
| TMIC9 | 13:48:17 | yes | Static | fixed all | 45°45′35.75523″ N | 21°38′09.21749″ E |
| TMIC9 | 13:48:17 | yes | Static | fixed all | 45°45′35.75627″ N | 21°38′09.21732″ E |
| Item No. | Height on Ellipsoid | Orthometric Height | Geoid | Error on X (m) | Error on Y (m) | Error 3D (m) |
|---|---|---|---|---|---|---|
| TMIC2 | 361.919 | 1.024.098 | −662.179 | 0.0064 | 0.0026 | 0.0069 |
| TMIC2 | 361.645 | 1.023.824 | −662.179 | 0.0004 | 0.0007 | 0.0008 |
| TMIC2 | 363.487 | 1.025.665 | −662.179 | 0.0004 | 0.0006 | 0.0007 |
| TMIC1 | 357.380 | 1.019.559 | −662.179 | 0.0013 | 0.0009 | 0.0016 |
| TMIC1 | 355.909 | 1.018.089 | −662.179 | 0.0005 | 0.0008 | 0.0010 |
| TMIC1 | 357.909 | 1.020.088 | −662.179 | 0.0003 | 0.0005 | 0.0006 |
| TMIC3 | 388.222 | 1.050.411 | −662.190 | 0.0045 | 0.0038 | 0.0059 |
| TMIC3 | 385.761 | 1.047.950 | −662.190 | 0.0004 | 0.0007 | 0.0008 |
| TMIC3 | 387.686 | 1.049.876 | −662.190 | 0.0004 | 0.0006 | 0.0007 |
| TMIC8 | 363.351 | 1.025.532 | −662.181 | 0.0021 | 0.0014 | 0.0026 |
| TMIC8 | 362.025 | 1.024.206 | −662.181 | 0.0005 | 0.0007 | 0.0009 |
| TMIC8 | 363.957 | 1.026.138 | −662.181 | 0.0004 | 0.0006 | 0.0007 |
| TMIC9 | 364.074 | 1.026.258 | −662.184 | 0.0056 | 0.0040 | 0.0069 |
| TMIC9 | 361.688 | 1.023.872 | −662.184 | 0.0005 | 0.0007 | 0.0009 |
| TMIC9 | 363.626 | 1.025.810 | −662.184 | 0.0005 | 0.0007 | 0.0008 |
| Coordinates WGS 1984 | ||||
|---|---|---|---|---|
| Station Name | Coordinates | Corrections | Sd | |
| TMIC1 | Longitude | 21°13′51.46271″ E | 0.0000 m | - |
| Height | 154.7278 m | 0.0000 m | - | |
| TMIC2 | Latitude | 45°45′44.01926″ N | −0.0004 m | 0.0271 m |
| Longitude | 21°38′08.84475″ E | 0.0032 m | 0.0212 m | |
| Height | 145.6545 m | 0.0000 m | 0.0612 m | |
| TMIC3 | Latitude | 45°45′42.31566″ N | −0.0004 m | 0.0293 m |
| Longitude | 21°38′12.53784″ E | 0.0032 m | 0.0220 m | |
| Height | 148.0696 m | 0.0000 m | 0.0547 m | |
| TMIC8 | Latitude | 45°45′36.90617″ N | −0.0004 m | 0.0320 m |
| Longitude | 21°38′08.29941″ E | 0.0032 m | 0.0224 m | |
| Height | 145.7076 m | 0.0000 m | 0.0568 m | |
| TMIC9 | Latitude | 45°45′35.84338″ N | −0.0004 m | 0.0344 m |
| Longitude | 21°38′09.21734″ E | 0.0032 m | 0.0251 m | |
| Height | 145.6592 m | 0.0000 m | 0.0611 m | |
| 1970 Stereographic Coordinates | ||||
|---|---|---|---|---|
| Station | Coordinates | Corrections | Sd | |
| FAGE | Y(m) | 280,960.4506 m | 0.0000 m | - |
| X (m) | 487,749.6411 m | 0.0000 m | - | |
| Z (m) | 173,080 m | 0.0000 m | - | |
| TIM1 | Y(m) | 207,132.2474 m | 0.0000 m | - |
| X (m) | 482,495.1249 m | 0.0000 m | - | |
| Z (m) | 111.641 m | 0.0000 m | - | |
| TMIC1 | Y(m) | 238,501.5611 m | 0.0032 m | 0.0208 m |
| X (m) | 479,067.2393 m | −0.0006 m | 0.0280 m | |
| Z (m) | 101.950 m | 0.0000 m | 0.0536 m | |
| TMIC2 | Y(m) | 238,508.7103 m | 0.0032 m | 0.0212 m |
| X (m) | 479,124.9330 m | −0.0006 m | 0.0271 m | |
| Z (m) | 102.483 m | 0.0000 m | 0.0612 m | |
| TMIC3 | Y(m) | 238,586.2440 m | 0.0032 m | 0.0220 m |
| X (m) | 479,069.0104 m | −0.0006 m | 0.0293 m | |
| Z (m) | 104.900 m | 0.0000 m | 0.0547 m | |
| TMIC8 | Y(m) | 238,487.6787 m | 0.0032 m | 0.0224 m |
| X (m) | 478,905.9765 m | −0.0006 m | 0.0320 m | |
| Z (m) | 102.539 m | 0.0000 m | 0.0568 m | |
| TMIC9 | Y(m) | 238,506.1187 m | 0.0032 m | 0.0251 m |
| X (m) | 478,872.3513 m | −0.0006 m | 0.0344 m | |
| Z (m) | 102.491 m | 0.0000 m | 0.0611 m | |
| Point No. | Stereographic Coordinates 1970 Static Reading (RTK) | ||
|---|---|---|---|
| X (m) | Y (m) | Z (m) | |
| TMIC1 | 479,067.286 | 238,501.567 | 102,111 |
| TMIC2 | 479,124.943 | 238,508.712 | 102,647 |
| TMIC3 | 479,069.033 | 238,586.241 | 105,086 |
| TMIC8 | 478,905.988 | 238,487.673 | 102,689 |
| TMIC9 | 478,872.351 | 238,506.115 | 102,642 |
| Point No. | Stereographic Coordinates 1970 Results from Post-Processing (STATIC) | ||
|---|---|---|---|
| X (m) | Y (m) | Z (m) | |
| TMIC1 | 479,067.239 | 238,501.561 | 101,950 |
| TMIC2 | 479,124.933 | 238,508.710 | 102,483 |
| TMIC3 | 479,069.010 | 238,586.244 | 104,900 |
| TMIC8 | 478,905.976 | 238,487.679 | 102,539 |
| TMIC9 | 478,872.351 | 238,506.119 | 102,491 |
| Point No. | Coordinate Differences RTK vs. STEREO | ||
|---|---|---|---|
| X (m) | Y (m) | Z (m) | |
| TMIC1 | 0.047 | 0.006 | 0.161 |
| TMIC2 | 0.010 | 0.002 | 0.164 |
| TMIC3 | 0.023 | −0.003 | 0.186 |
| TMIC8 | 0.012 | −0.006 | 0.150 |
| TMIC9 | 0.000 | −0.004 | 0.151 |
| Point No. | RTK vs. STEREO Coordinate Differences | |
|---|---|---|
| (m) | (cm) | |
| TMIC1 | 0.010 | 1 |
| TMIC2 | 0.050 | 5 |
| TMIC3 | 0.020 | 2 |
| TMIC8 | 0.010 | 1 |
| TMIC9 | 0.000 | 0 |
| Project | Station Point | ScanWorld | Date | Time | Method |
|---|---|---|---|---|---|
| Scan Costei1 | Costa 1-GPS | sw-003 | 20.10.2017 | 12.09.53 | “Known Backsight” |
| Position: 0.006 m; Height: 0.004 m | |||||
| Observation | |||||
| Name | East Y (m) | North X (m) | Share Z (m) | Target H (m) | Target type |
| Costei1 | 255,279.914 | 475,633.333 | 116.820 | 2.170 | HDS Tgt 6 inches |
| Residual value | |||||
| Name | δx | δy | δz | ΔHz | |
| Costei2 | −0.003 | −0.004 | 0.011 | 0.005 | |
| Result | |||||
| Name | Est Y (m) | North X (m) | Share Z (m) | Scanner H (m) | Orientation [°] |
| Costei1 | 255,245.829 | 475,594.854 | 116.716 | 1.621 | −33.1794 |
| Accuracy | Position | 0.006 | Altitude | 0.004 | |
| Project | Station Point | ScanWorld | Date | Time | Method |
|---|---|---|---|---|---|
| Scan Costei1 | Costa 1-GPS | sw-003 | 20.10.2017 | 12.09.53 | “Known Backsight” |
| Position: 0.006 m; Height: 0.004 m | |||||
| Observation | |||||
| Name | East Y (m) | North X (m) | Share Z (m) | Target H (m) | Target type |
| Costei1 | 255,245.817 | 475,594.846 | 116.702 | 2.170 | HDS Tgt 6 inches |
| Residual value | |||||
| Name | δx | δy | δz | ΔHz | |
| Costei2 | −0.012 | −0.012 | −0.014 | 0.014 | |
| Result | |||||
| Name | Est Y (m) | North X (m) | Share Z (m) | Scanner H (m) | Orientation [°] |
| Costei1 | 255,206.308 | 255,206.308 | 114.305 | 1.515 | −34.2774 |
| Accuracy | Position | 0.006 | Altitude | 0.004 | |
| Project | Station Point | ScanWorld | Date | Time | Method |
|---|---|---|---|---|---|
| Scan Costei1 | Costa 1-GPS | sw-003 | 20.10.2017 | 12.09.53 | “Known Backsight” |
| Position: 0.006 m; Height: 0.004 m | |||||
| Observation | |||||
| Name | East Y (m) | North X (m) | Share Z (m) | Target H (m) | Target type |
| Costei3 | 255,206.308 | 475,565.924 | 114.261 | 2.170 | HDS Tgt 6 inches |
| Residual value | |||||
| Name | δx | δy | δz | ΔHz | |
| Costei3 | −0.000 | −0.000 | 0.004 | 0.000 | |
| Result | |||||
| Name | East Y (m) | North X (m) | Share Z (m) | Scanner H (m) | Orientation [°] |
| Costei4 | 255,184.348 | 475,493.796 | 110.542 | 1.586 | −11.6676 |
| Accuracy | Position | 0.006 | Altitude | 0.004 | |
| Features | Scanning Equipment | |
|---|---|---|
| ScanStation Leica C10 | Leica Pegasus | |
| Number of points | 50,000 points/s | 600,000 points/s |
| Cameras | 1 camera | 5 rooms |
| Gyroscope | No, being static | Yes |
| Accelerometer | No, being static | Yes |
| GNSS | No | Yes |
| GRID choice | Yes (from 1m—mx cm) | No (it’s according to the speed) |
| Data collection time | Long allotted time/station, requiring knowledge for the implementation and orientation of topographical instruments | Short time, being mobile, does not require targets and knowledge of placing topographic equipment in the station |
| Processing time | Quite short, knowledge for automatic and manual alignment of points | Long, SLAM processing, Kalman Filter |
| Number of images | 260/station | Depending on the chosen distance, which will be multiplied by 5 (5 cameras) |
| Preparation of the gear | Time identical to the placement of a total station | It involves mounting a GNSS reference station, a dynamic initialization and a static one, and after the scans are completed, the repetition of the two initializations |
| Use targets | Yes | No |
| Ground control points (GCP) | No | Yes |
| Weight | 16 kg | 11.9 kg |
| Battery life | Long, with the possibility of change while performing the scan, scans with 2 batteries at a time, and automatic permutation between them | Long, scans with 4 batteries at once, and with automatic permutation between them, first the top two will be consumed, then the bottom two |
| Scanning angle | 360 degrees in the horizontal plane with 270 degrees in the vertical plane | 360 degrees horizontally with 200 degrees in the vertical plane |
| Scanning temperature | Greater than 4 °C, or possibly a “jacket” will be purchased for the device, avoiding places with strong and cold winds | Below 0 °C, because the mechanism is covered, scanning is also possible in windy and cold conditions |
| Other optional items | The need to make black & white targets for each work, or to purchase 6-inch targets from suppliers | A GNSS equipment for RiNNEX data collection, installation of a reference station |
| Features | DJI Phantom 4 Pro GNSS RTK-UAV | Leica ScanStation C10_TLS | Leica Pegasus Backpack_MMS |
|---|---|---|---|
| Control network | A lot of needs | A lot of needs | Just a few needed if GNSS visibility is poor |
| Regulations | Strict regulations, especially in urban areas | No | No |
| Inside/outside | Exterior only | Interior & Exterior | Interior & Exterior |
| Data collection time | Reduced | Larger | Reduced |
| Data processing time | Fast | Medium | Elevated |
| Absolute accuracy in 3D | 5.0 to 8.0 cm | 0.1 to 1.0 cm | 2–4 cm |
| Flexibility | Average (due to strict regulations) | High | High |
| Cost | Medium | Reduced | Elevated |
| Price in Euro | ≈1500 | ≈80,000 | ≈400,000 |
| Manufacturer | Leica Pegasus: Backpack | Viametris BMS3D | OSLAM | HERON | Li-Backpack | ROBIN 3DLM–Walk Drive Fly |
|---|---|---|---|---|---|---|
| Spherical images | 200°–5 cam–20 MPIX | 360°–LB5:30 MPIX or 4cam 200°–20 MPIX | 360°–LB5: 30 MPIX | 360°–2 MPIX | N O | y 70°–5 MPIX |
| Photogrammetry | YES | NO | NO | NO | NO | NO |
| Scanner | VLP16 | VLP16 | VLP16 | VLP16 | VLP16 | NO |
| GNSS | High-precision GNSS antenna | GNSS Antenna | GNSS Antenna | NO | NO | 2 GNSS antennas |
| IMU | IMU High, 125 HZ | NO | NO | NO | NO | YES |
| SLAM | YES | YES | YES | YES | YES | YES with the help of an additional ZEBREVO device |
| Flashlight/ lantern | YES | NO | NO | NO | NO | NO |
| Positioning | GNSS/IMU/SLAM/RTK | SLAM/GNSS | SLAM/GNSS | SLAM | SLAM | GNSS/IMU/SLAM |
| Ergonomics | Perfectly wearable, it is up to the level of the head, there is no danger of hitting the door frame for example (REDDOT award for design) | It is not perfectly wearable, the antenna arm poses a danger of hitting the door frame, it is overhead | It is not perfectly wearable, the antenna arm poses a danger of hitting the door frame, it is overhead | Danger of hitting the height | Danger of hitting the height | Difficult to wear for more than 45 min because it has 2 antennas, the center of gravity is not suitable |
| Producer/Distributor | Vexcel | Leica |
|---|---|---|
| Country | Austria | Switzerland |
| points/second | 300,000 | 600,000 |
| field of view | 26 cameras 360 oriz/30 vert. 6,6 MP | 360 oriz/200 vert. |
| Camera | 1 camera 360 roiz/180 vert 105 mp | 5 cameras × 4 MP CCD + 2 LiDAR sensors |
| CCD | 2088 × 2152 | 2046 × 2046 |
| pixel size | 1.4 × 1.4 microns | 5.5 × 5.5 microns |
| Lens | 3.24 mm focal length | 6 mm focal length |
| Max. frame speed/second | 1.5 fps | 2 fps |
| data type | LiDAR | LiDAR |
| 3D laser scanner | Rotating multi-beam LiDAR | Dual Velodyne VLP16 with 270 × 30 aperture to scanner |
| No. of channels | 16 | 16 |
| Frequency | 10 Hz | 10 Hz |
| working distance | 100 m | 100 m is maximum, useful is 70 m |
| Batteries | 2 batteries up to 2 h of work | 4 batteries up to 6 h of work |
| positioning system | GNSS/IMU | GNSS/IMU (Clear Navigation Unit for mapping in locations without GNSS/SLAM signal (Simultaneus Localisation And Mapping) for mapping and localization |
| Constellations | - | GPS, GLONASS, GALILEO, BEI DU |
| Band | Multiband GNSS | L-band, SBAS, QZSS |
| software included | Ultra-Essential Terrestrial Map | Infinity Basic |
| Temperature | 0–40 degrees C | 0–40 degrees C |
| storage temp. | −20 to + 50 | from −20 to + 50 |
| - | 1GB/minute of travel | |
| weight | 16.0 kg | 11.9 kg |
| Dimensions | 110 × 37 × 32 | 73 × 27 × 31 |
| Relative | 3 cm | 2–3 cm outside/inside |
| absolute on the outside | 5 cm | 5 cm |
| absolute on the inside without checkpoints | - | 5–50 cm for 10 min walking, minimum 3 double passes |
| Images | JPG, TIFF | JPG, ASCII for photogrammetric parameters |
| point clouds | LAS | LAS, RGB, Recap, 2D, 3D, E57, DWG, DGN, KMZ |
| Provider | Name | Laser Scanner | IMU/GNSS | Digital Camera | ||
|---|---|---|---|---|---|---|
| Sensor (s) | Range | Accuracy | Pos. Absolute | Resolution | ||
| TOPCON | IP-S3 | 1 scanner | 100 m, @ ρ100% | 50 mm@ 10 m (1σ) | 0.015–0.025 m | Spherical camera, 8000 × 4000 px |
| TRIMBLE | MX8 | 1-2 VQ-250 | 500 m, @ ρ80% | 10 mm@ 50 m (1σ) | 0.020–0.025 m | Up to 7 cameras, 5 Mpx |
| 1-2 VQ-450 | 800 m, @ ρ80% | 8 mm@ 50 m (1σ) | ||||
| 3D laser mapping | Street Mapper | 1-2 VUX-1HA | 400 m, @ ρ80% | 5 mm, (1σ) | 0.050 m | Panoramic camera, 12 Mpx |
| Riegl | VMX-250 | 2 VQ-250 | 500 m, @ ρ80% | 10 mm@ 50 m (1σ) | 0.020–0.050 m | Up to 6 cameras, 5 Mpx |
| renishaw | Dynascan S250 | 1-2 scanner(s) | 250 m | 10 mm@ 50 m (1σ) | 0.020–0.050 m | - |
| TELEDYNE OPTECH | Lynx SG1 | 2 scanners | 250 m, @ ρ10% | 5 mm, (1σ) | 0.050 m | Up to 5 cameras, 5 Mpx and/or panoramic camera |
| Lynx MG1 | 1 scanner | 0.200 m | ||||
| Leica Geosystems | Leica Pegasus | ZF 9012 | 119 m | 0.9 mm@ 50 m, ρ80% (1σ) | 0.015–0.020 m | 8 cameras, 2000 × 2000 px |
| Leica P20 scan | 120 m, @ ρ18% | 6 mm@ 100 m (1σ) | ||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Șmuleac, A.; Șmuleac, L.; Popescu, C.A.; Herban, S.; Man, T.E.; Imbrea, F.; Horablaga, A.; Mihai, S.; Paşcalău, R.; Safar, T. Geospatial Technologies Used in the Management of Water Resources in West of Romania. Water 2022, 14, 3729. https://doi.org/10.3390/w14223729
Șmuleac A, Șmuleac L, Popescu CA, Herban S, Man TE, Imbrea F, Horablaga A, Mihai S, Paşcalău R, Safar T. Geospatial Technologies Used in the Management of Water Resources in West of Romania. Water. 2022; 14(22):3729. https://doi.org/10.3390/w14223729
Chicago/Turabian StyleȘmuleac, Adrian, Laura Șmuleac, Cosmin Alin Popescu, Sorin Herban, Teodor Eugen Man, Florin Imbrea, Adina Horablaga, Simon Mihai, Raul Paşcalău, and Tamas Safar. 2022. "Geospatial Technologies Used in the Management of Water Resources in West of Romania" Water 14, no. 22: 3729. https://doi.org/10.3390/w14223729