
An Analytical Framework for Investigating Trade-Offs between Reservoir Power Generation and Flood Risk
by
 ,
,
Lin Zhang
1,2,
Jay R. Lund
2,
Wei Ding
1,*,
Xiaoli Zhang
3,
Sifan Jin
1,
Guoli Wang
1 and
Yong Peng
1 1
School of Hydraulic Engineering, Dalian University of Technology, Dalian 116024, China
2
Center for Watershed Sciences, Department of Civil and Environmental Engineering, University of California, Davis, CA 95616, USA
3
School of Water Resources, North China University of Water Resources and Electric Power, Zhengzhou 450045, China
*
Author to whom correspondence should be addressed.
Water 2022, 14(23), 3841; https://doi.org/10.3390/w14233841
Submission received: 22 October 2022
/
Revised: 20 November 2022
/
Accepted: 22 November 2022
/
Published: 25 November 2022
(This article belongs to the Special Issue Multi-Objective Water Resources Operations)
Abstract
:Converting floodwater into power without increasing flood risk is critical for energy-stressed regions. Over the past decades, numerous methods have been proposed to solve this problem. However, few studies have investigated the theoretical explanation of the trade-offs between power generation and flood risk. This study establishes an analytical framework to derive optimal hedging rules (OHR) and explains the economic insights into flood risk reduction and power generation improvement. A two-stage model based on the concept of dynamic control of carryover storage (DCCS) was developed as part of the framework, considering forecast uncertainty and risk tolerance. The results illustrated that hedging and trade-offs between power generation and flood risk during DCCS only occurs when the forecasted inflow and forecast uncertainty are within certain ranges, beyond which there is no hedging and trade-offs analysis; either power generation or flood risk becomes the dominant objective. The OHR was divided into three cases under different levels of forecast uncertainty and risk tolerance. Compared to forecast uncertainty, downstream risk tolerance plays a more important role in determining which case of the OHR is adopted in real-world operations. The analysis revealed what and how intense trade-offs are between power generation and flood risk under different scenarios of forecasted inflow, forecast uncertainty, and risk tolerance. The framework serves as a guideline for less abundant water resources or energy-stressed areas of operational policy. Nierji Reservoir (located in northeast China) was taken as a case study to illustrate the analysis, and the application results showed that OHR increases the average annual power generation by 4.09% without extra flood risk compared to current operation rules.
1. Introduction
The energy crisis and climate change catalyze the demand for renewable energy sources [1]. Optimal hydropower reservoir operation is highly valued because it effectively promotes renewable power generation, which has great environmental advantages for reducing the emissions of fossil fuel combustion [2,3,4]. Reservoir operation is a decision-making process that seeks the optimal storage volume for multiple objectives [5,6,7]. For the operation during flood season, flood control is the prime concern and requires a reduction in storage to accommodate the incoming floods and minimize downstream damage caused by excess flow, which conflicts with power generation [8,9]. To solve this problem, significant effort has been expended to elevate storage volume to increase power generation [10,11,12,13], in which the dynamic control of carryover storage (DCCS) is proven an effective method [14,15,16]. For instance, Jiang et al. [17] proposed a credibility-based fuzzy chance-constrained model, and fuzzy simulation technology was used to optimize the dynamic control bound. Liu et al. [18] focused on the multi-objective optimal scheduling of the dynamic control of the flood-limited water level for cascade reservoirs based on a multi-objective evolutionary algorithm to obtain the trade-offs between flood control and power generation.
It is clear from the studies mentioned above that DCCS research is primarily focused on two concepts: first, taking forecast uncertainty into account and hence optimizing the upper storage bound of DCCS; second, utilizing normal storage as the upper limit of DCCS but using the optimization algorithm and identifying the optimal carryover storage to balance power generation and flood risk. However, these studies contribute to the technology and applications of DCCS and lack systematic physical and economic insights into the relationship between power generation and flood risk.
A critical issue for trade-offs between power generation and flood risk is quantifying the effects of inflow forecast uncertainty [19,20]. Although the forecasting technology has recently been significantly improved, the forecast uncertainty still cannot be avoided and should be considered in reservoir operations [21,22]. The forecast uncertainty might cause the release to exceed the downstream threshold and the probability of that event resulting in flood risk [23]. Risk tolerance is set to control the flood risk within a certain level, which is a chance constraint [24,25]. The reduction of a chance constraint to a deterministic equivalent yield is widely used in multipurpose reservoir operations [26]. This paper introduces the minimum flood-safety margin constraint proposed by Ding et al. [27] to consider the effects of forecast uncertainty and to meet downstream flood protection standards.
Another problem for the trade-off analysis is the explanation of what and how two objectives conflict under different scenarios of inflow. Deriving hedging rules based on the marginal utility principle is an effective method to describe the relationship between conflicting objectives; however, it relies on the analysis of the marginal utilities of the objectives. Draper and Lund [28] proved that the two-stage water-supply operation obeys the marginal utility principle, which elaborates the marginal utilities of storage and release, and derived the optimal hedging rules to obtain optimal carryover storage and to reduce future water-shortage risks. Following this principle, You and Cai [29,30] formulated future inflow uncertainty with Taylor expansions to inspect the water-supply principle. Zhao et al. [6] proved two-stage flood operations that considered forecast uncertainty following the marginal utility principle under expected floods. Ding et al. [27,31] came up with the marginal utility principle of a flood control-water conservation operation by evaluating the utility functions of carryover storage and future safety margin. For power generation and flood risk, evaluating the marginal utility of power generation is needed to explore whether the marginal utility principle can be applied. Zhao et al. [32] used the water balance, expressed the release by carrying over storage, and showed the marginal utility of power generation (MUPG) increasing with carryover storage during the dry season. To explore the MUPG over the whole year of operation, Tan et al. [33] proposed a successive iteration method to use the approximate MUPG instead of analytical functions. However, they did not evaluate the MUPG during the flood season under different scenarios of forecasted inflow, which results in different relationships with flood risk.
This study addresses these two problems in the complicated optimization problem that maximizes power generation and minimizes flood risk. Deriving the relationships between forecasted inflow and decision operations offers a better understanding of the optimal solutions. This research focused on three aspects: (1) a two-stage model based on the concept of DCCS was developed to mathematically express the actual needs of power generation and flood risk during the flood season; (2) the economic characteristics of power generation, forecasted inflow, and forecast uncertainty were considered comprehensively to applicable conditions for DCCS; (3) the OHR under different levels of forecast uncertainty and risk tolerance was derived, which revealed the trade-off between power generation and flood risk under different scenarios of forecasted inflow. This research provides an analytical framework to reveal trade-offs between power generation and flood risk under different forecasted inflow, forecast uncertainties, and risk tolerance, which serves as a guideline for reservoir operational policy.
2. Study Area
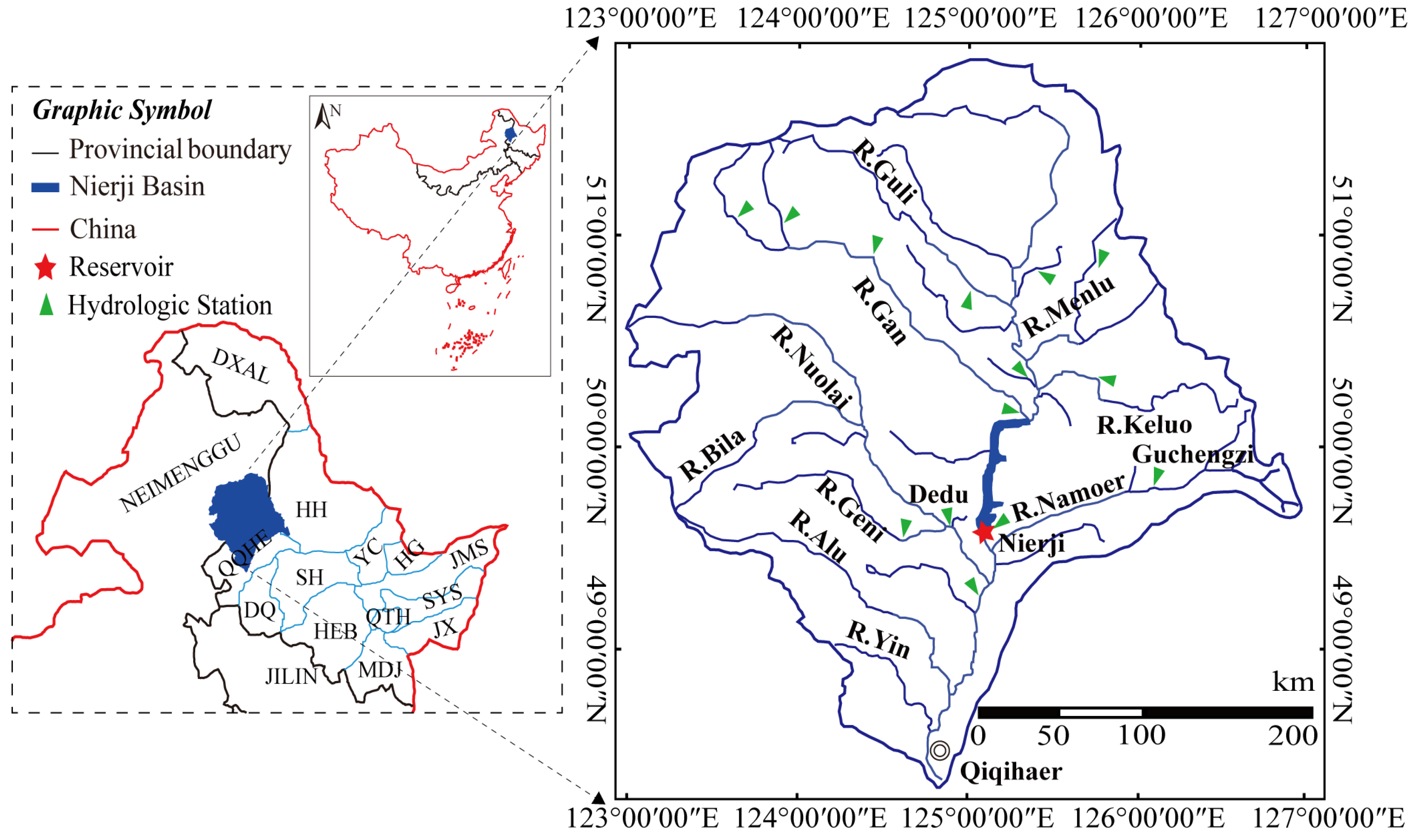
The Nierji basin in Northeast China (123° E~127.33° E, 48.42° N~51.68° N) is located on the Nen River across Heilongjiang Province and the Inner Mongolia Autonomous Region, as shown in Figure 1.
Nierji Reservoir is a large-scale, comprehensive water conservancy project with multi-year regulation performance that was designed to avoid flood damage in Qiqihaer City, water supply, power generation, shipping, and ecology. The normal water level of Nierji Reservoir is 216 m, the normal storage volume is 6.456 × 109 m3, the flood-limited water level is 213.37 m, the flood-limited storage volume is 5.220 × 108 m3, the total installed capacity is 250 MW, the total overflow capacity of the turbine unit is 1270 m3/s, and the minimum downstream water demand (including industry, agriculture, urban life, ecology, etc.) is 200 m3/s.
Nierji Basin has a cold-temperate continental monsoon climate, with windy and sandy conditions in the spring, warm and rainy conditions in the summer, cool conditions in the autumn, and cold and dry conditions in the winter. According to the statistics of the Nierji meteorological station, the average annual precipitation is 475 mm, decreasing from north to south, and the distribution is uneven within the year. The annual precipitation is mainly concentrated in the flood season; the total rainfall from June to September is 392.9 mm, accounting for about 70% of the total annual precipitation; winter precipitation is low, accounting for about 5% of the annual runoff; spring runoff is slightly increased, accounting for about 15% of the annual runoff; and autumn runoff accounts for about 10%.
Currently, the operation rules were designed based on two static storage volumes: (1) flood-limited storage volume (5.220 × 109 m3) during the main stage of flood season (from 21 June to 25 August) and (2) normal storage volume (6.456 × 109 m3) during the early stage of flood season (from 1 June to 20 June) and the late stage of flood season (from 26 August to 30 September). Although the operation is easy, unnecessary spills during the flood season and energy reduction in both flood and non-flood seasons may be caused. Consequently, it is necessary to increase the storage volume of the main flood season for power generation improvement without adding extra flood risk.
3. Methods
3.1. The Dynamic Control of Carryover Storage (DCCS)
With the improvement of hydrological and meteorological forecasting techniques, DCCS is operated by the related administration, implying that the storage volume can fluctuate within dynamic control bounds based on forecast information [14,16]. During DCCS, three operation modules correspond to the three stages of the flooding process, respectively [18]. The rising flood stage needs to pre-release floodwater stored above the lower bound of dynamic control. Regular flood control operations at the major flood stage are carried out in accordance with existing operating standards. Refilling at the flood recession stage can improve the floodwater storage benefits, which was the motivation of this study.
3.1.1. Two-Stage Model
In practice, which module of DCCS is triggered depends heavily on the forecasted information. If there is not a large, forecasted inflow in the future, the refill operation is active and power generation is improved by utilizing the receding floodwater to increase the storage volume. If there is a large, forecasted inflow in the future, the pre-release module is activated to lower the storage volume to the flood-limited storage volume (FLSV), and then regular flood control operation is adopted to protect downstream safety from a flood event. Therefore, DCCS should consider the forecasted inflow in both the current and future stages. For the refill operation, the increased storage volume using floodwater should be reasonably determined. Though power generation grows when more floodwater is held, it may lead to spilling and increasing flood risk. On the contrary, if less floodwater is stored, the flood risk is relatively small, but power generation does not increase significantly.
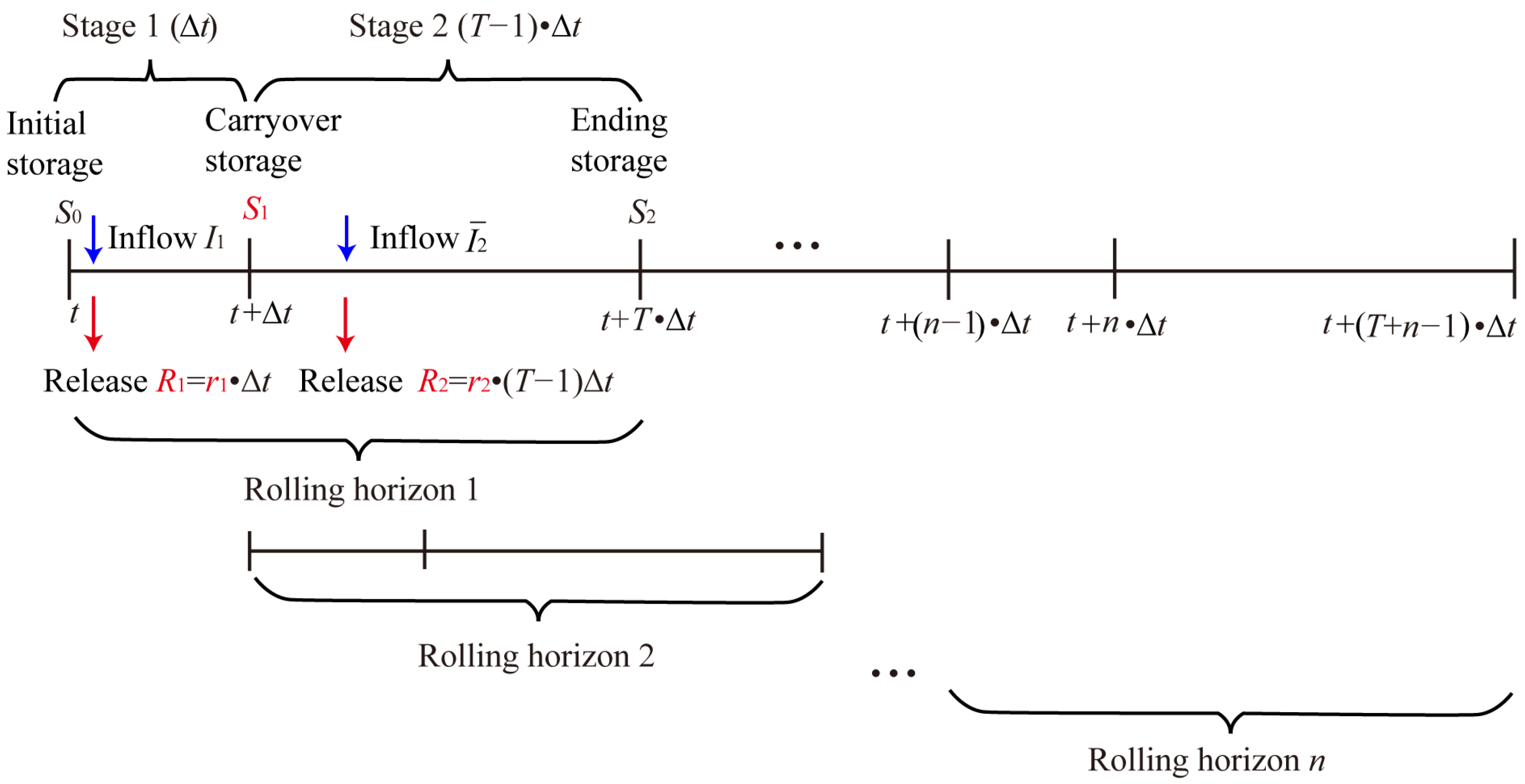
To sum up, the DCCS procedure balances power generation and flood risk by considering the forecasted inflow of two stages (present and future stages) and determining the storage capacity reasonably. The decision should be revised as the forecasted inflow updates in the following operation period. As a result, the DCCS procedure follows a two-stage dynamic rolling-horizon operation scheme as shown in Figure 2. At time t, a rolling horizon includes T periods and is divided into two stages: Stage 1 (present stage) called the decision-making stage (including one period Δt), and Stage 2 (future stage) known as the residual stage of the flood forecast horizon (including (T−1) ·Δt periods), where T is the forecast horizon. The initial and final storage volumes (S0 and S2) and the inflow forecasting in two stages (i.e., I1 and I2) are known in DCCS, while the release volume in two stages (i.e., R1 and R2) and the carryover storage (S1) between the two stages are decision variables [34,35]. Only the release in Stage 1 (R1) and carryover storage (S1) is determined, and the window rolls over to the next period until the final scheduling period [28,29,36,37].
Due to the short forecast horizon and the large storage capacity, evaporation and leakage can be ignored [38], and the water-balance equations in the two stages are as follows:
where rk, Ik, and Rk are the release (in rate), inflow, and release in Stage k (k = 1, 2), respectively. S2 is assumed to be equal to FLSV (SL) to avoid additional flood risk [27]. That is, all the excess storage above the primary FLSV should be released in Stage 2, namely,
It is worth mentioning that S2 does not have to be equal to SL in practice, because the decision is updated when the model rolls over to the next period.
3.1.2. Forecast Errors and Flood Risk
In the real world, typical flood control systems feature an upstream reservoir for flood storage to protect the levee area downstream. In this study, flood risk represents the possibility of levee collapse caused by forecasted error rather than the dam failing [39].
Inflow forecasting error, characterized as the difference between actual and expected inflow, which includes the error of model inputs, structure, and parameters, might induce flood risk [40]. The flood risk in Stage 1 is assumed to be zero since the forecast error on a short horizon is small, and the inflow in Stage 1 is assumed to be deterministic, which is elaborated on by Ding et al. [27]. The inflow forecasting error (ε) and flood risk in Stage 2 are expressed as follows:
where I2 and represent actual and forecasted inflows. denotes the expected release in Stage 2; τ (·) is the downstream flood risk, which indicates the probability of the actual release exceeding the downstream safety threshold Qthres. δ is the flood-safety margin, which is the difference between downstream safety threshold Qthres and expected release . H (∙) is the probability density function of ε.
3.1.3. Power Generation in Two Stages
The power generation E in two stages is the total power generation of Stage 1 (E1) and Stage 2 (E2),
The power generation at Stage k (k = 1, 2) Ek is calculated as the product of hydro-turbine efficiency η, water head [(SSR(Sk−1) + SSR(Sk))/2 − SDR], and reservoir release Rk [32,40]. When the release in two stages is replaced by carryover storage according to the water balance in Equations (1) and (2), power generation Ek is the function of carryover storage S1, as expressed by Equation (7):
where SSR () is the stage-storage relationship of the reservoir, SSR (S0) and SSR (S1) represent the initial and ending water level of Stage 1, respectively, and SSR (SL) is the water level of SL. SDR is the downstream water level and can be simplified as a constant [32].
3.2. Model Formulation
3.2.1. Objective Function
A two-stage model is used to maximize power generation and minimize flood risk. In order to solve the problem of two conflicting objectives, the weighting factor ω (0 ≤ ω ≤ 1) is employed as a compromise after normalizing the two objectives, resulting in the following objective function:
where G1 and G2 are power generation and flood risk objectives, respectively. Emax is the maximum power generation in two stages without spilling and is equal to the product of installed capacity Nmax and two stages’ duration, i.e., Emax = Nmax × T∙Δt.
The marginal contributions of S1 to G1 and δ to G2 are given by
dE/dS1 has been proven to be positive if there is no spilled water, i.e., increasing carryover storage generates a net gain in power generation in the two-period hydropower scheduling under no spilled water [32]. SSR′ (S1) is the first-order derivative of SSR (S1) and is positive, i.e., SSR′ (S1) > 0 [37,41]. The forecast error series (ε) is assumed to follow an unbiased Gaussian distribution, and the marginal contribution of δ to G2 can be expressed as the second function of Equation (9) [27].
3.2.2. Constraints
Regular constraints for reservoir management problems, including water balance, downstream minimum water demand, storage capacity, and tolerable risk, are converted into the constraints for decision variables, i.e., S1 and δ, shown as follows:
where Qthres − δ denotes the expected volume of release in Stage 2, i.e., Qthres − δ = . is the carryover storage that Stage 1 releases water at the minimum downstream water demand, i.e., R1 = . It is worth noting that the downstream water demand in Stage 2 () is regarded to be satisfied since all carryover storage should be released in Stage 2. The carryover storage should not be lower than SL to guarantee water supply. In the meantime, the thresholds for the tolerance of flood risk (τ ≤ τr) should be met to guarantee downstream flood control [6,42]. That is, δ should be greater than the minimum safety margin δmin, and δmin is expressed as follows when the forecast error follows an unbiased Gaussian distribution [27]:
where Φ−1(∙) is the inverse of the cumulative probability function with a standard normal distribution.
Furthermore, the carryover storage constraints for maximum power generation in two stages should be met and written in Equation (12) because they are carryover storage thresholds for their MUPG not to be zero [32]. If they are not met, there will be abandoned water, resulting in extra flood risk without power generation improvement.
where stands for the minimum carryover storage and enables power generation in Stage 1 to reach its maximum value (E1 = ) without spilling as dE1/dS1 < 0, and is the maximum carryover storage that leads to the maximum power generation in Stage 2 without spilling (E2 = ) as dE2/dS1 > 0. When the initial storage capacity, inflow in two stages, the installed capacity of a reservoir Nmax, and the length of two stages are given, then and can be calculated as:
All these conversions are because the generation target is related to S1, while the flood risk target is only related to δ according to Equation (9).
3.2.3. Optimal Conditions
For convex programming, the Karush Kuhn Tucker (KKT) condition is the sufficient and necessary condition [43]. The solution of the model must be the extreme value point and the global optimal when it satisfies the KKT conditions [44,45]. According to the derivation above, the objective function is concave and all constraint functions are convex; thus, the problem is a convex programming problem, and KKT conditions for the two-stage model are written as:
where λ, , , and are shadow prices that quantify the additional value resulting from changing the constraints by one unit and satisfying that λ ≠ 0, , , ≥ 0. The optimal KKT conditions are obtained from Equation (14):
When all inequality constraints in Equation (14) are unbound, that is, = = = = = 0, then Equation (15) transforms:
Equation (16) indicates that the optimal condition obeys the marginal utility principle [28].
3.3. Trade-Offs between Power Generation and Flood Risk
The optimal conditions of the model demonstrate that trade-offs between power generation and flood risk are allocated carryover capacity (S1) and flood-safety margin (δ), which is determined by the relationships between the marginal utility of power generation (MUPG, f1) and that of flood risk (MUFR, f2). Therefore, in this section, the MUPG under various forecasted inflow and carryover storage is evaluated to obtain the allowable inflow range for hedging and trade-offs during DCCS. Besides, the effects of forecast uncertainty and risk tolerance on trade-offs and operation decisions are analyzed.
3.3.1. Evaluation of the Marginal Utility of Power Generation
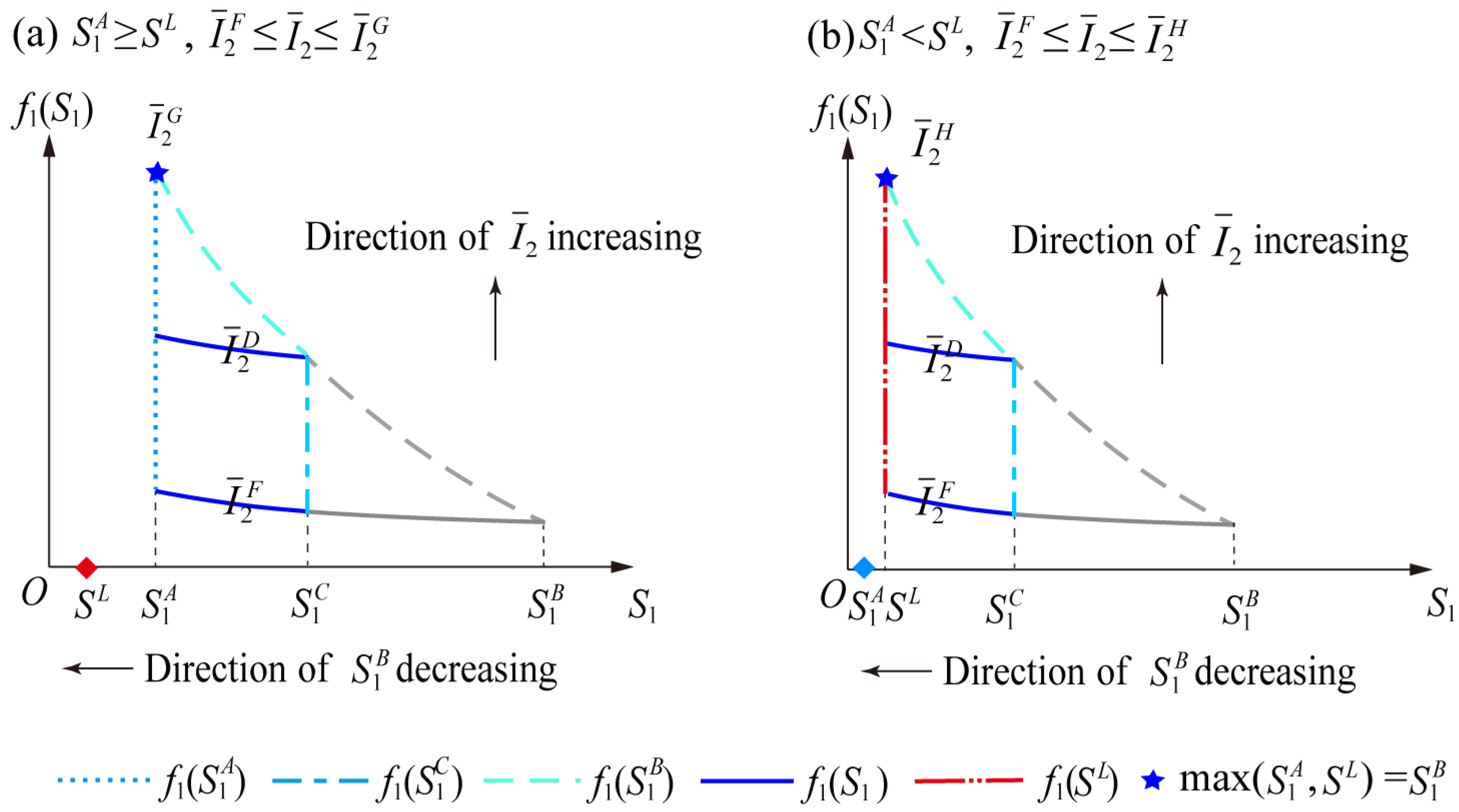
According to Equation (9), MUPG varies with inflows of two stages (i.e., I1 and ) and the carryover storage (S1). To evaluate the MUPG, the three influencing factors should be discussed separately, where MUPG was proven to increase with S1 by Zhao et al. [32], as shown by the solid blue line in Figure 3. The influence of I1 is analyzed through two scenarios, that is, a relatively large I1 resulting in ≥ SL and a small I1 leading to < SL. Then, this part focuses on the impacts of under each scenario since > is directly engaged in the allocation of S1 and δ.
When the given I1 is relatively large and triggers the maximum power generation in the Stage 1 constraint, i.e., ≥ SL, the lower bound of carryover storage is , as shown in Figure 3a. The bottom solid curve depicts the variation of MUPG with S1 under the forecasting inflow , which equals downstream water demand (i.e., = ) and is the minimum allowable inflow for trade-offs. The small forecasting inflow in Stage 2 causes the larger , i.e., > , where the solid gray curve indicates the infeasibility domain of MUPG. When increases from to , the curve of MUPG moves upward, decreases, and the upper bound of the carryover storage is . When Stage 1 releases available water to meet downstream water demand, the forecasting inflow causes power generation in Stage 2 to peak, i.e., = . When exceeds , the upper bound of carryover storage is , and the MUPG curve shortens with increasing . When = , power generation in two stages reaches its maximum, i.e., = , and the MUPG curve becomes a point. As a result, is the maximum forecasting inflow allowed for trade-offs during DCCS, and the forecasting inflow in the Stage 2 within [, ] allows for trade-offs under relatively large I1.
However, when the given I1 is relatively small, leading to < SL, the lower bound of carryover storage is SL, as shown in Figure 3b. is the forecasted inflow trigger of the maximum power generation of Stage 2 and FLSV constraints at the same time (i.e., = SL). Then, the forecasting inflow in Stage 2 within [, ] is allowed for trade-offs under a relatively small I1.
3.3.2. The Starting and Ending Points of Hedging
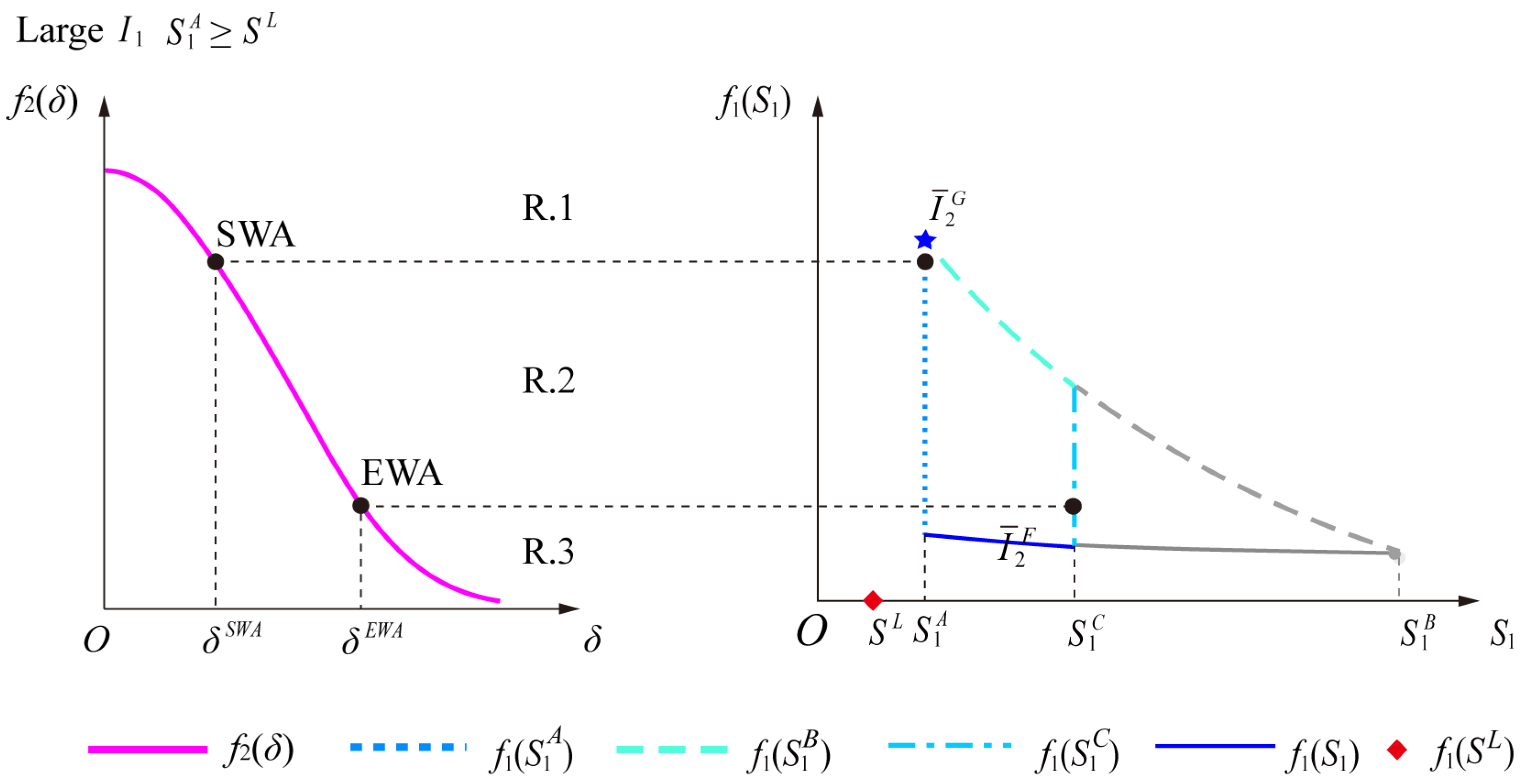
The starting and ending conditions (SWA and EWA) of hedging are important to characterize the range of hedging Figure 4 shows the SWA and EWA at the lower bound of carryover storage ().
As illustrated in Figure 4, and δSWA represent the forecasted inflow and flood-safety margin at the starting point (SWA) of hedging, causing the MUPG (f1()) at the lower bound of carryover storage () to equal the marginal utility of flood risk (MUFR, f2(δSWA)), i.e., f1() = f2(δSWA). Equation (17) can be used to calculate and δSWA.
When the lower bound is SL, the in Equation (17) needs to be replaced by SL. and δSWA under the lower bound of carryover storage SL are written as follows, illustrating that and δSWA vary with the inflow of Stage 1.
and δEWA are the forecasted inflow and flood-safety margin at the ending point of hedging, which make the MUPG (f1()) at the upper bound of carryover storage () equal the marginal utility of flood risk (MUFR, f2(δEWA)), i.e., f1() = f2(δEWA), and they are obtained by Equation (19),
However, the MUPG and MUFR cannot be equal when the upper bound of carryover is in real-world operation because of the forecast uncertainty. When S1 = , the power generation of Stage 2 has its maximum value without abandoned water. If the forecasted inflow is smaller than the actual inflow, the reservoir fails to increase power generation, which is accompanied by abandoned water and increasing flood risk. Thus, the MUFR is larger than the MUPG in this situation. SWA and EWA points, as shown in Figure 3, divide the relationship between MUPG and MUFR into three categories: R.1, R.2, and R.3.
- R.1:
- When the forecasted inflow () ranges from to or from to , the relatively large inflow illustrates a large flood risk, and the MUFR exceeds MUPG under optimal conditions in Appendix B1, i.e., f2(δ*) > f2(δSWA) = f1() or f2(δ*) > f2(δSWA) = f1(SL). As a result, carryover storage should be kept at its lowest level in order to accommodate a large, forecasted inflow and to reduce the potential flood risk in Stage 2. Under the lower bound , the optimal carryover storage and flood-safety margin are = , δ* = Qthres + SL − − . When the lower bound is SL, they are written as = SL, δ* = Qthres − .
- R.2.:
- When ranges from to , more carryover storage brings more power generation but also higher flood risk. The optimal carryover storage and flood-safety margin are to equalize the marginal utility, i.e., f2(δ*) = f1().
- R.3.:
- When ranges from to , the relatively small inflow shows that floodwater can be carried over to the next stage as much as possible, and the MUPG is always greater than MUFR based on Equation (A9), i.e., f1() > f2(δEWA) = f2(δ*). Therefore, the carryover storage should be kept at the upper bound of carryover storage, namely, Stage 1 releases the downstream water demand Rmin 1, and the remaining available water from Stage 1 is carried over to Stage 2 to increase power generation due to the relatively small forecasted inflow, i.e., = , δ* = Qthres + SL − − .
3.3.3. Effects of Forecast Uncertainty and Risk Tolerance
The forecasted inflows and flood-safety margins at SWA and EWA (i.e., δSWA and δEWA) are related to the forecast uncertainty of inflow (σ) based on Equations (17)–(19), illustrating that the hedging range (the difference between δEWA and δSWA) varies with σ. However, extremely tiny or very big forecast uncertainties result in little or huge flood risk, and the specific target is power generation or flood risk. This section first derives the minimum and maximum forecast uncertainties to identify the forecast uncertainty range permitted for hedging during DCCS and then investigates the effects of forecast uncertainty and risk tolerance on the hedging range.
- The allowable forecast uncertainty
According to the analysis in Section 3.1, G is a special point for DCCS application under the lower bound . When point G is the starting point of hedging, we have = , δG = Qthres + SL − − , f1() = f2(δG) (equal marginal utility principle), and the forecast uncertainty at point G is deduced from Equation (16), denoted by σmin,
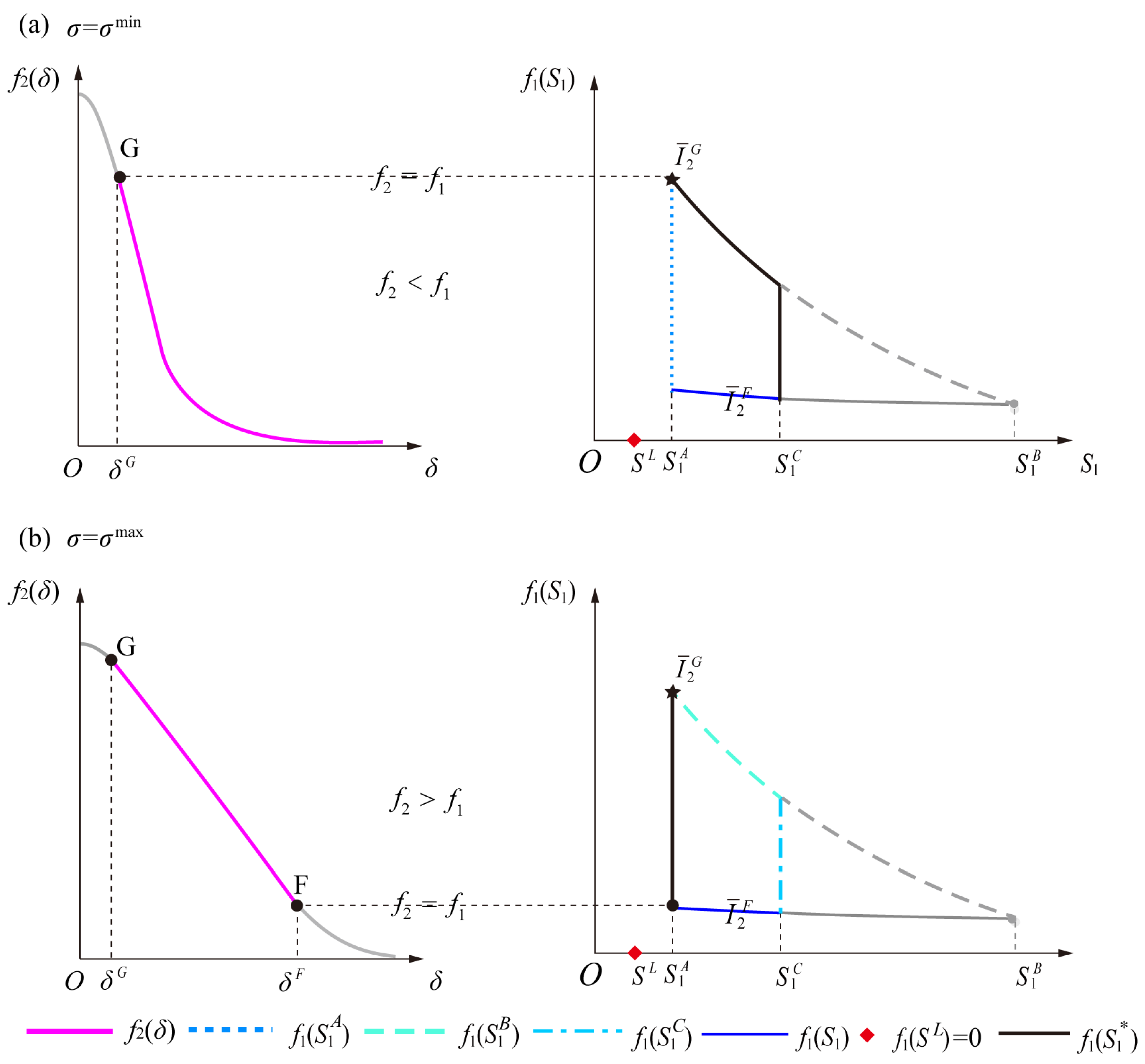
σmin, causing little flood risk, is the minimum forecast uncertainty for hedging, and power generation plays the dominant role within the allowable inflow range for DCCS application. There is no hedging between the two objectives until the forecasted inflow equals , and the power generation in two stages both reaches its maximum values (i.e., = , = ). According to Equation (15), the unique hedging point G is as shown in Figure 5a, and the optimal carryover storage is always equal to the upper bounds because MUPG is greater than MUFR (i.e., f1 > f2).
The other extreme case of hedging is when point F is the starting point of hedging and we have = , δF = Qthres + SL − − , f1() = f2(δF) (equal marginal utility principle), and the forecast uncertainty at point F is expressed as σmax,
σmax represents the maximum forecast uncertainty allowed for hedging, illustrating a relatively high flood risk, and the carryover storage remains at the lower bound (i.e., = ) to reduce the flood risk. There is no hedging between two objectives until the forecasted inflow is as small as the downstream water demand (2 = ). Because MUPG is less than MUFR (i.e., f1 < f2), when 2> , there is only one hedging point F, as shown in Figure 5b.
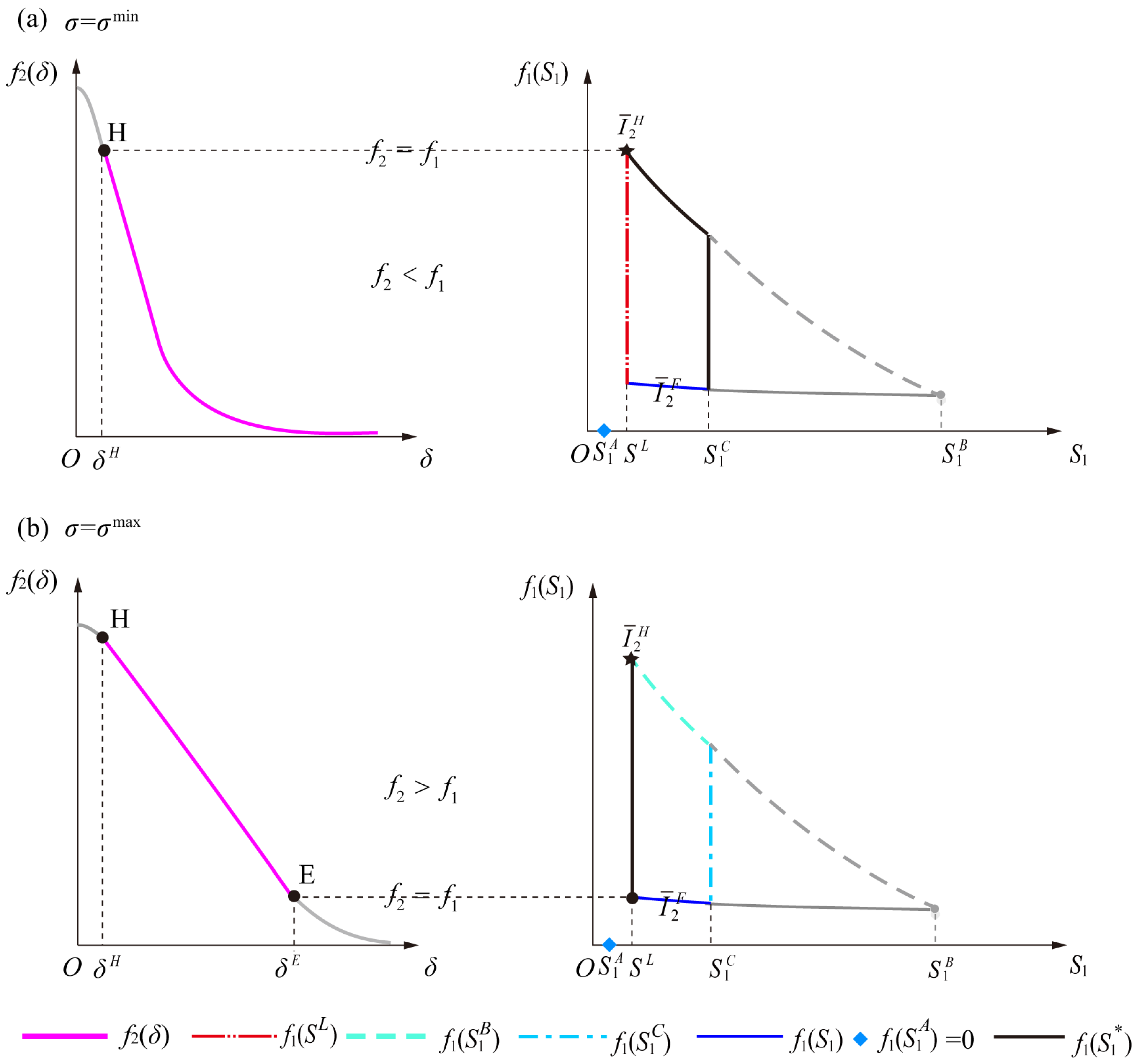
However, H and E are critical points for hedging when the lower bound changes to SL, as shown in Figure 6, and they are similar to the points G and F, respectively. When point H is the starting point of hedging, we have = SL, δH= Qthres − , f1(SL) = f2(δH), and and in Equation (20) for solving σmin are replaced by SL and , respectively. If point E is the starting point of hedging, we have = SL, δE = Qthres − , f1(SL) = f2(δE), and in Equation (21) for σmax becomes SL. Equation (22) expresses σmin and σmax under the lower bound SL:
To summarize, trade-offs and hedging between power generation and flood risk occur only when the forecast uncertainty falls within the range defined by Equations (20)–(22), i.e., σmin ≤ σ≤σmax. If σ < σmin, causing too little flood risk, the power generation objective takes precedence over the flood risk objective during DCCS, which requires carryover storage as high as its upper bounds, and the optimal carryover storage under different forecasted inflows is represented by black solid curves in Figure 5a and Figure 6a, S= min{, }; if σ > σmax, resulting in a very large flood risk, then the reduced flood risk always dominates over the increasing power generation during DCCS, which calls for carryover storage as low as its lower bounds, and optimal solutions are represented by black solid curves in Figure 5b and Figure 6b, = max{, SL}.
- 2.
- Combined impacts of forecast uncertainty and risk tolerance
In order to assess the effects of forecast uncertainty and risk tolerance, the minimal flood-safety margin (δmin) was introduced by Ding et al. [23]. According to Equation (11), δmin decreases as the risk tolerance (τr) increases and the forecast uncertainty (σ) decreases. ΔSWA and δEWA, defined in Section 3.2, are the flood-safety margins at the start and end points of hedging, respectively, when the minimum flood-safety margin (δmin) constraint is unbinding. However, the flood-safety margin range for hedging may be altered when δmin is considered.
Choosing a σ from the allowable forecast uncertainty range for hedging, there are three possible cases under various τr: Case 1 (δmin < δSWA), Case 2 (δSWA ≤ δmin ≤ δEWA), and Case 3 (δmin > δEWA), because τr is only related to δmin but is not relevant to δSWA and δEWA. The flood-safety margin range for hedging in Case 1 is the same as the unbinding δmin; that range is from δmin to δEWA in Case 2, and there is no hedging in Case 3. That is, as risk tolerance decreases, there are fewer opportunities for hedging between power generation and flood risk, and the flood risk objective becomes more important for reservoirs.
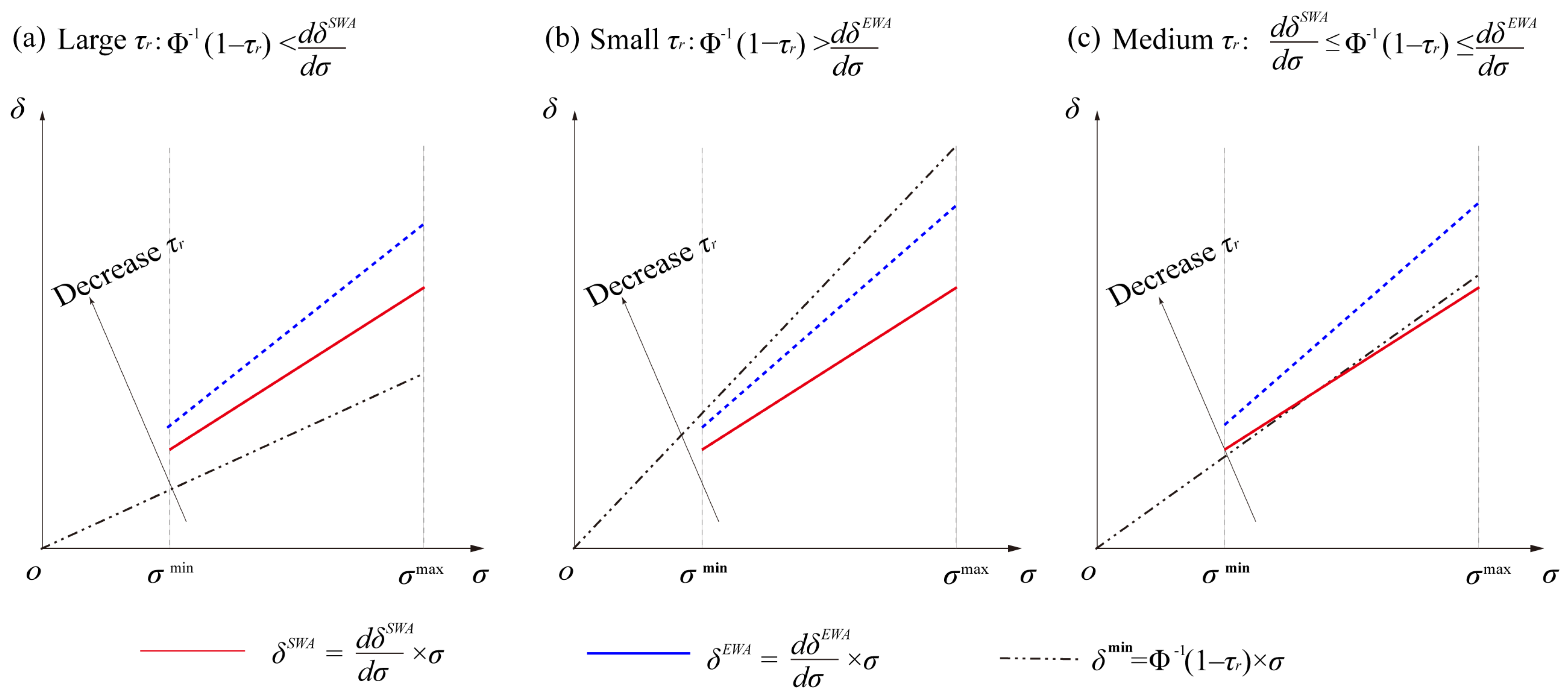
Forecast uncertainty complicates the connections among δmin, δSWA, and δEWA for a given τr. To evaluate the influence of σ, the trends of increasing δmin, δSWA, and δEWA as σ increases are deduced in Appendix A, i.e., dδmin/dσ = Փ−1(1-τr) > 0, dδEWA/dσ > dδSWA/dσ > 0, and the increase rates of dδEWA/dσ and dδSWA/dσ as σ increase are derived to be small according to Equations (A3) and (A5). They are assumed to be zero here for simplicity (i.e., d2δSWA/dσ2≈0, d2δEWA/dσ2≈0). As a result, when the given τr is very small (i.e., Փ−1(1 − τr) > dδEWA/dσ) or very large (i.e., Փ−1(1 − τr) < dδSWA/dσ), forecast uncertainty does not influence the relationships among δmin, δSWA, and δEWA within its allowable range [σmin, σmax], as illustrated in Figure 7a,b. That is, only Case 1 (i.e., δmin < δSWA) exists under a large risk tolerance, whereas only Case 3 (δmin > δEWA) occurs with a small risk tolerance. Furthermore, as seen in Figure 7c, increasing forecast uncertainty affects the starting of hedging when the risk tolerance is medium and satisfies dδSWA/dσ ≤ Փ−1(1 − τr) ≤ dδEWA/dσ, and the range for hedging may be narrowed.
In conclusion, various risk tolerances have an independent effect on the flood-safety range for hedging, but the effects of forecast uncertainty on the hedging range are heavily dependent on the risk tolerance. However, the effects of risk tolerances and forecast uncertainty can still be generalized into three cases, namely, Case 1 (δmin < δSWA), Case 2 (δSWA ≤ δmin ≤ δEWA), and Case 3 (δmin > δEWA).
3.3.4. The Optimal Hedging Rules (OHR)
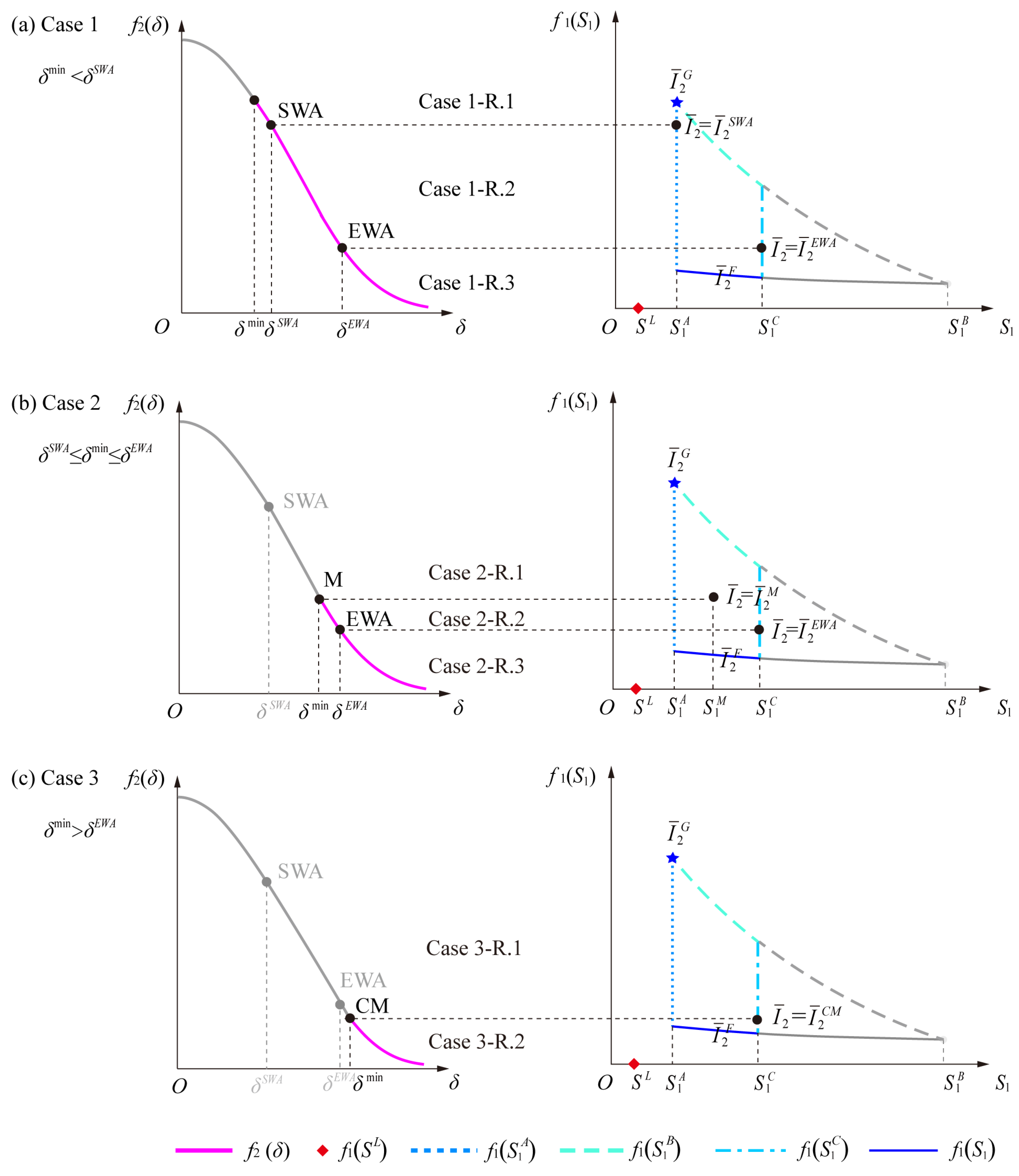
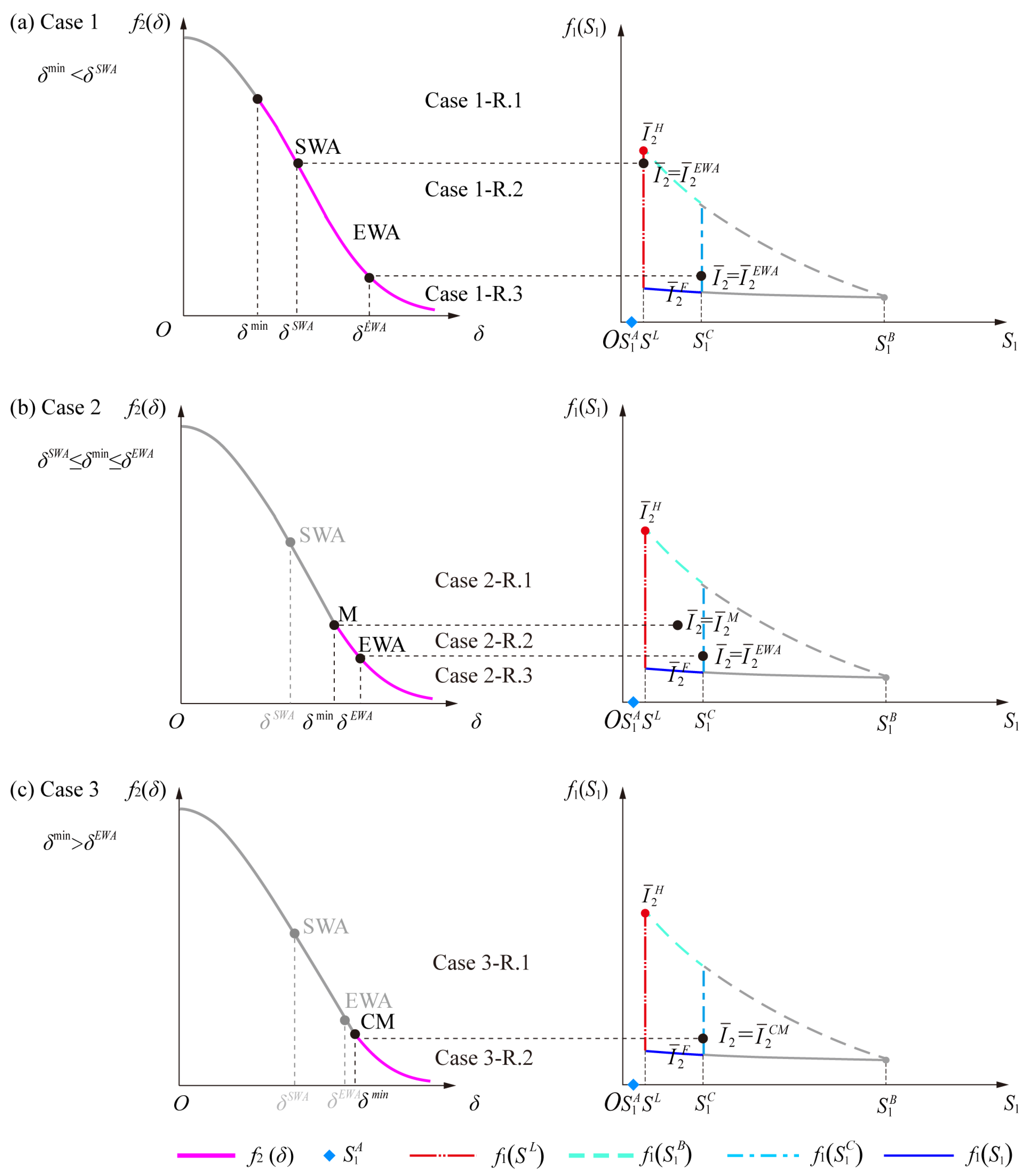
The optimal hedging rules (OHR) for three cases are derived based on the optimal conditions of the model and are given in Appendix B. Figure 8 and Figure 9 show the relationship between MUFR (f2) and MUPG (f1) for the three cases under different lower bounds of carryover storage, where the left panel shows the variation of MUFR (f2) with the increasing δmin, and the right panel shows the variation of MUPG (f1) with the decreasing .
- Case 1: δmin < δSWA
As demonstrated in Figure 8a, when the minimum flood-safety margin is smaller than the flood margin at the starting point of hedging, δmin < δSWA, which has no influence on the start and end points of hedging. As a result, the optimal hedging rule under this case is the same as unbinding δmin. There are three relationships between MUPG and MUFR denoted as Case 1-R.1, Case 1-R.2, and Case 1-R.3 under different inflow conditions, which are the same as R.1, R.2, and R.2 in Section 3.2, respectively. The optimal solutions under different inflow conditions can be summarized as follows when the lower bound is :
When the lower bound is SL, as shown in Figure 9a, the maximum allowable inflow changes from to , and the optimal carryover storage in the first subfunction in Equation (23) is SL, which is written as follows:
- 2.
- Case 2: δSWA ≤ δmin ≤ δEWA
Figure 8b and Figure 9b show the relationships between MUPG and MUFR under the medium safety margin, i.e., δSWA ≤ δmin≤ δEWA. Point M is the new beginning point for hedging, where the flood-safety margin is δmin. The range for hedging is narrowed since δmin is greater than δSWA, illustrating that much more flood-safety margin is required to reduce flood risk if the risk tolerance declines or the forecast uncertainty under a medium risk tolerance increase. The corresponding carryover storage and forecasted inflow to point M are acquired by the marginal utility principle, i.e., f1() = f2(δmin),
Similar to Case 1, the start and end points of hedging continue to categorize the relationship between marginal utilities of power generation and flood risk into three types, denoted by Case 2-R.1, Case 2-R.2, and Case 2-R.3.
Case 2-R.1: When the inflow in Stage 2 meets < ≤ , according to Equation (A10), the marginal utility of power generation exceeds the maximum marginal utility of flood risk f2(δmin), i.e., f1(S1) > f1() = f2(δmin), indicating that allocating available water after meeting the minimum safety margin requirement for carryover storage will increase power generation, i.e., δ* = δmin, = Qthres + SL − − δmin.
Case 2-R.2: When the forecasted inflow ranges from to , the optimal carryover storage and flood-safety margin satisfy the marginal utility principle, i.e., f1() = f2(δ*).
The optimal solutions for Case 2-R.3 are the same as for Case 1-R.3.
Then, the optimal solutions of Case 2 under different lower bounds can be generalized as follows:
- 3.
- Case 3: δmin > δEWA
As shown in Figure 8c and Figure 9c, there is no hedging between power generation and flood risk since the flood-safety margin for hedging is less than the feasible region of flood-safety margin for flood control, i.e., δ* ≥ δmin > δEWA. is a special inflow that raises the carryover capacity to its upper bound while decreasing the optimal flood-safety margin to its lowest value, i.e., + δmin = Qthres + SL − .
Case 3-R.1: The marginal utility of power generation always exceeds that of flood risk when the forecasted inflow ranges from to according to the KKT conditions in Equation (A10).
Case 3-R.2: When < , the carryover storage can be kept at its upper bounds due to the small forecasted inflow, and the optimal solutions are = , δ* = Qthres + SL − − .
The optimal solutions under different lower bounds are the same except for the maximum allowable inflow for trade-offs and can be summarized as Equation (27):
The operation operation rules under different levels of inflow forecast uncertainty and risk tolerance can be summarized in Table 1.
4. Application Results
4.1. Inputs of Model
In the two-stage model, we assumed that the weight ω for power generation is 0.2 and the preference for flood risk is 0.8. The reason for such an assumption is that the lower weight for power generation restricts the rise in optimal carryover storage to ensure the relatively small flood risk to guarantee downstream flood safety. However, ω is not a fixed value that can be determined by decision-makers. If decision-makers prefer to increase storage volume for improved power generation but with higher flood risk, the weight can be assigned a higher value.
SSR(S) is the stage-storage relationship that fits well with a function of 0.00325 × abs(S − 3,913,450)0.407 + 184.10. The efficiency coefficient of the turbine η equaled 8.5, and the stage downstream water level SDR was 184.5 m based on the Nierji Reservoir Operation Manual issued in 2014.
The forecast horizon included three days (T = 3), where one day was for Stage 1 (decision stage, Δt = 24 h) and two days were for Stage 2 (future stage, (T − 1)∙Δt = 48 h). To guarantee the safety of the downstream levee, the reservoir safety discharge Qthres was 1600 m3/s according to the historical data. The downstream water demand, including municipal, industrial, agricultural, and environmental flow, was 200 m3/s.
4.2. Optimal Hedging Rules Experiment
This section applies the derivation from Chapter 3 to obtain the allowable forecast uncertainty range for hedging during DCCS, as well as the range of forecast uncertainty and risk tolerance under three cases. As the carryover storage is stored at the flood recession stage, the inflow in Stage 1 should be slightly larger than that in Stage 2. To be reasonable, we used the series of inflows in stages 1 and 2 ranging from 1.036 × 108 to 1.728 × 107 m3 and 1.728 × 108 to 3.456 × 107 m3, respectively.
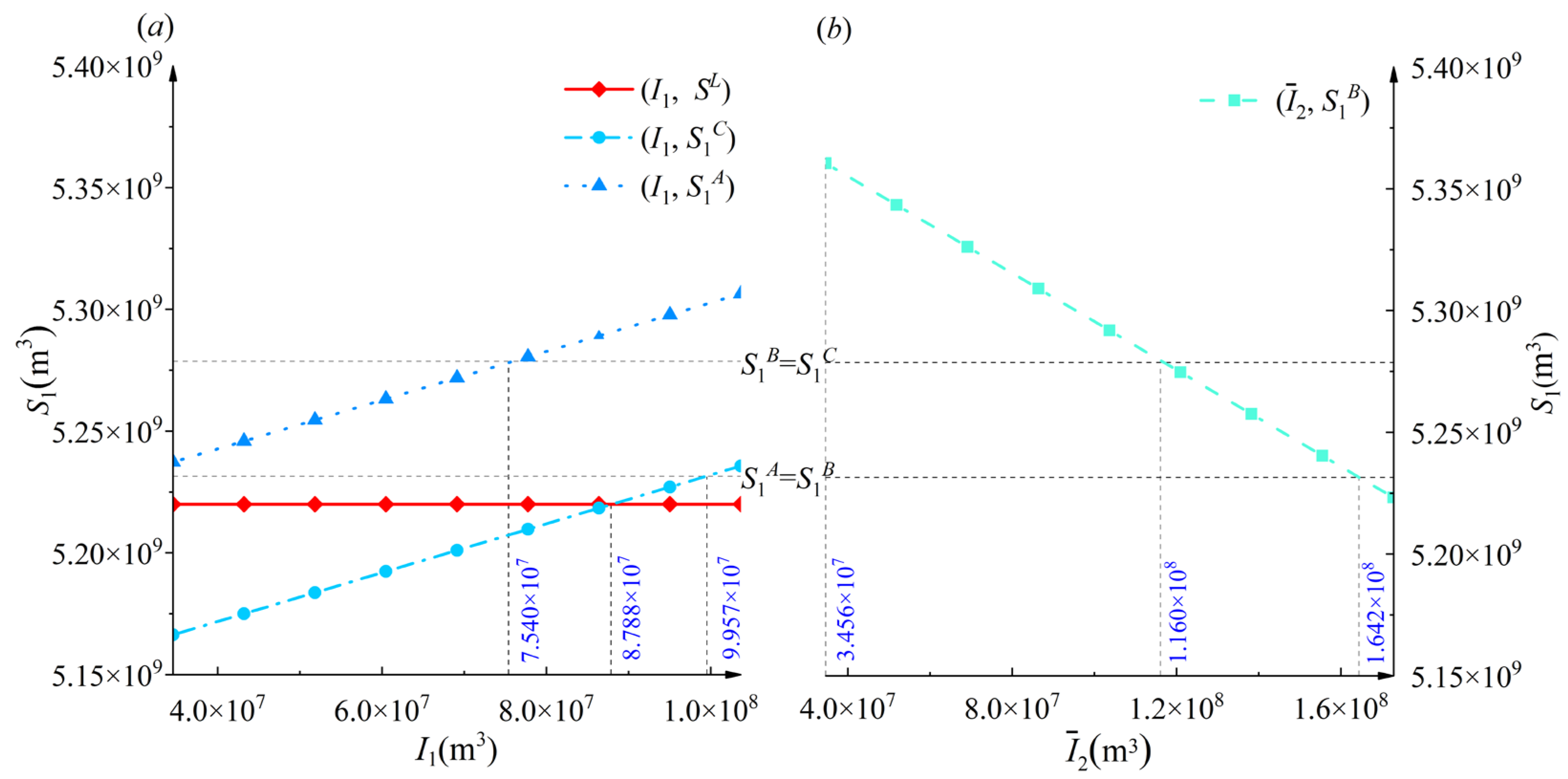
Figure 10 shows that the bounds of carryover storage vary with different inflows, in which the bounds of carryover storage (, ) increase as the inflow in Stage 1 (I1) increases, while falls as the forecasted inflow in Stage 2 () rises. For I1 ≤ 8.788 × 107 m3, the lower bound is SL (5.220 × 109 m3), and the maximum power generation of Stage 1 () limits the lower bound when I1 > 8.788 × 107 m3. The critical forecasted inflow () for the upper bound is 1.160 × 108 m3 when I1 = 7.540 × 107 m3. That is, is the upper bound (ranging from 5.237 × 109 to 5.279 × 109 m3) when 3.456 × 107 ≤ I1 ≤ 7.540 × 107 m3 and 3.456 × 107 ≤ ≤ 1.160 × 108 m3 because of ≥ . That bound shifts to , which increases from 5.279 × 109 to 5.361 × 109 m3 when 7.540 × 107 < I1 ≤ 9.957 × 107 m3 and 1.160 × 108 < ≤ 1.642 × 108 m3. In particular, = = 5.231 × 109 m3 when I1 = 9.957 × 107 m3 and = 1.642 × 108 m3, illustrating that the maximum forecasted inflow for hedging () is 1.642 × 108 m3. Besides, the minimum forecasted inflow is equivalent to 3.456 × 107 m3 according to the downstream water demand.
According to the feasible domain of the carryover storage and the allowable inflow range obtained above, the forecast uncertainty range allowed for hedging during DCCS can be derived, using Equations (20) and (21), which is within [2.309 × 107, 5.450 × 107].
Based on historical data, the estimated forecast error of inflows followed the normal distribution, i.e., ε~N (μ = −3.11 × 106, (σ = 2.368 × 107)2). Then, the flood-safety margins at the starting and ending points of hedging were calculated via Equations (17)–(19), i.e., δSWA = 1.037 × 108 m3 and δEWA = 1.054 × 108 m3. The ranges of risk tolerance τr corresponding to three cases (i.e., δmin < δSWA, δSWA ≤ δmin ≤ δEWA, and δmin > δEWA) were derived by δmin = μ + σ∙Φ−1(1 − τr) and are listed in Table 2.
Furthermore, three different risk tolerances (5 × 10−3, 4.50 × 10−6, 7.93 × 10−7) were chosen from its range obtained above to derive the forecast uncertainty ranges corresponding to three cases, and the results are shown in Table 2. When τr = 5 × 10−3, δmin is always smaller than δSWA at any forecast uncertainty within its allowable range for hedging. For example, if μ = 0, σ = 3.456 × 107, then δmin < δSWA can be known since δmin = 9.210 × 107 m3 and δSWA = 1.501 × 108 m3. When τr = 4.50 × 10−6, Case 2 (δSWA ≤ δmin ≤ δEWA) occurs under forecast uncertainty ranging from 2.309 × 107 to 3.456 × 107 or within [3.974 × 107, 5.450 × 107], while Case 3 (δmin > δEWA) happens at a relatively small range of forecast uncertainty, i.e., (3.456 × 107, 3.974 × 107). When τr is 7.93 × 10−7, there is no hedging between power generation and flood risk within the allowable forecast uncertainty range.
In summary, all three cases exist when risk tolerance decreases under a given forecast uncertainty and all three cases exist. However, whether one or two of the three cases exist depends on the values of the given risk tolerance, which is consistent with the theoretical derivation.
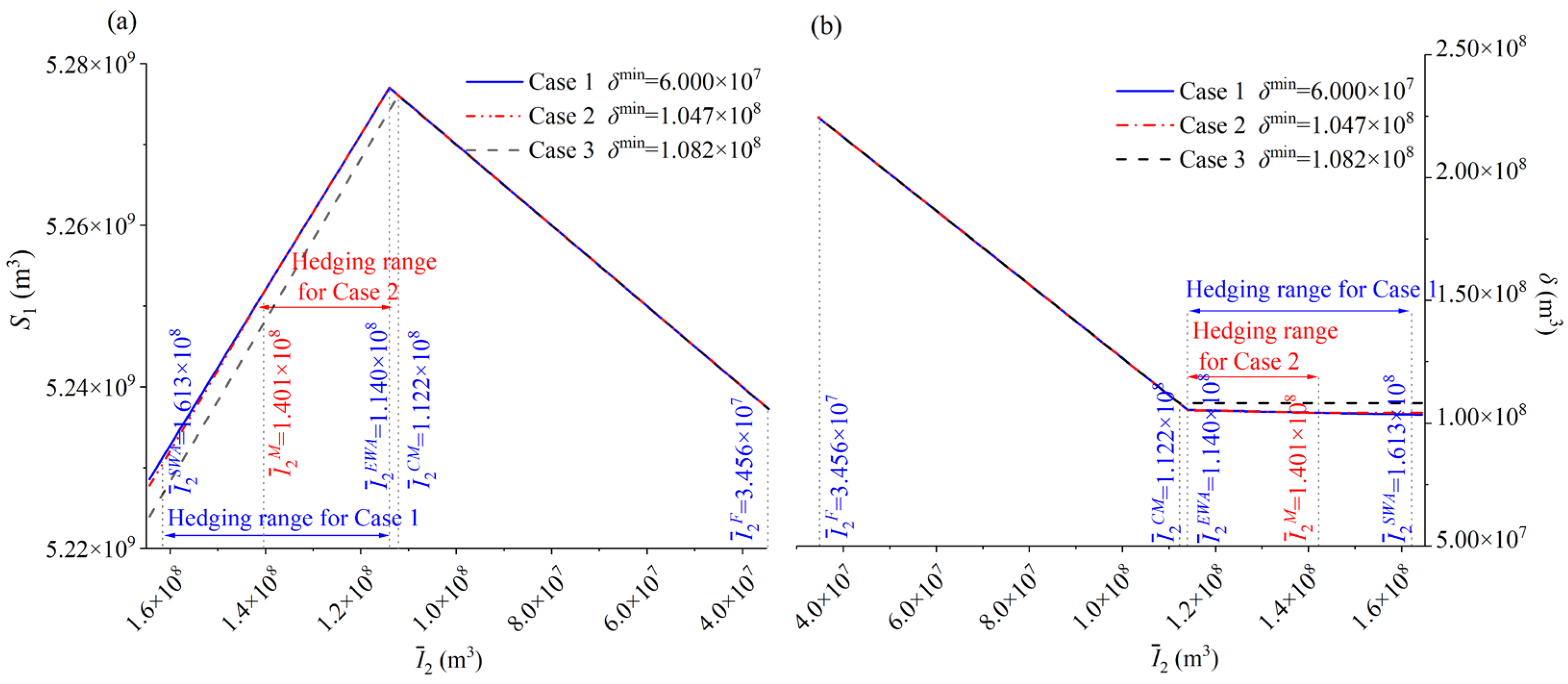
Following that, the optimal solutions for three cases are calculated to quantify the effects of various minimum flood-safety margins on the operation decisions. The solid blue curves, red dotted curves, and black dashed curves in Figure 11 represent τr = 5 × 10−3, 4.50 × 10−6, and 7.93 × 10−7, corresponding to Case 1, 2, and 3, respectively, and δmin takes the values of 6.000 × 107 m3, 1.047 × 108 m3, 1.082 × 108 m3 for the three cases under current forecast level (σ = 2.368 × 107). As τr decreases in Figure 11, the hedging range is narrowed down, and there is no hedging when τr is small enough.
As shown in Figure 11a, the optimal carryover storage () for three cases declines slightly with the increasing δmin under the same within [1.613 × 108 m3 to 1.401 × 108 m3], where they represent the inflows at the starting points of hedging for cases 1 and 2, respectively, namely, = 1.613 × 108 m3 and = 1.401 × 108 m3. For example, when = 1.613 × 108 m3, corresponds to three cases: 5.229 × 109 m3, 5.228 × 109 m3, and 5.224 × 109 m3, respectively. Under the same ranging from 1.401 × 108 m3 () to 1.140 × 108 m3 (), is the same for Cases 1 and 2 because hedging exists within the inflow range, and for Case 3 is less than for Cases 1 and 2. When ranges from 1.140 × 108 m3 () to 1.122 × 108 m3 (), equals the upper bound of carryover storage for Cases 1 and 2, while for Case 3 is the carryover storage net of δmin and less than its upper bound. If the forecasted inflow is within [3.456 × 107 m3, 1.122 × 108 m3], then 3.456 × 107 m3, representing the minimum allowable inflow for hedging, i.e., , the three curves overlapping indicate that for three cases is equal. The tendency of optimal flood-safety margins (δ*) in three cases is the opposite to that of carryover storage, as shown in Figure 11b.
4.3. Comparison with the Current Operation Rules
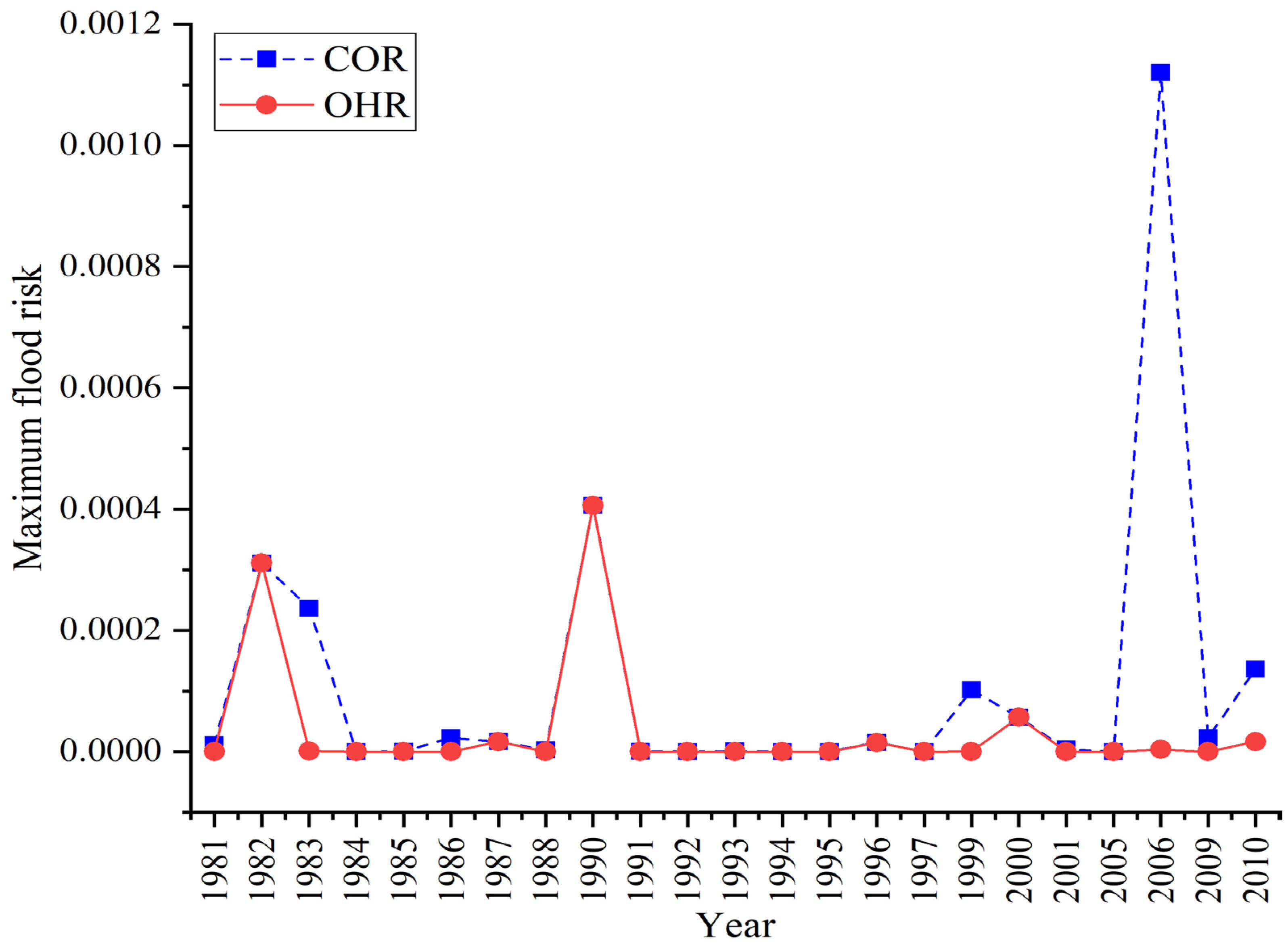
In this section, the OHR is used in continuous scheduling from 1981 to 2010, based on the forecasted inflow data from historical records. The operation period in flood and non-flood seasons lasts three days and ten days, respectively. Nierji’s risk tolerance is 0.005 and δmin = 6.023 × 107, thus, the optimal solutions are the same as in Case 1. The performance of OHR is compared to that of current operating rules (COR) in flood risk and power generation, as shown in Figure 12 and Table 3, respectively.
Figure 12 illustrates the maximum flood risk under two operation rules from 1981 to 2010. The maximum flood risk in each year for OHR is the maximum value chosen from the flood risk sets when OHR was applied, compared with the maximum flood risk selected from the flood risk sets when COR was used at the same period. The results show that the maximum flood risk can be reduced during OHR application, especially in 1981, 1983, 1986, 1999, 2006, 2009, and 2010. In fact, the maximum risk of other years was also lower, but the risk reductions are difficult to show in the graph because both the flood risk and the reduction were very small and close to 0. In addition, the maximum flood risk in extra wet years (1989 and 1998) and extra dry years (2002, 2003, 2007, and 2008) was not estimated since OHR was inapplicable. For extra wet years, the excessive inflows resulted in spills, and controlling flood risk was the unique objective, whereas in extra dry years, the inflow was insufficient to fulfill downstream water demand, and the storage volume was lower than the FLSV to satisfy downstream water demand.
Table 3 shows that, in comparison to the COR, the OHR outperformed in terms of increasing power generation on an annual average in flood and non-flood seasons, as well as in wet, normal, and dry years. Although both flood and non-flood seasons benefitted from the elevated storage volume for improving power generation, the non-flood season saw more increases than the flood season. For wet, normal, and dry years, the OHR had the best performance in dry years.
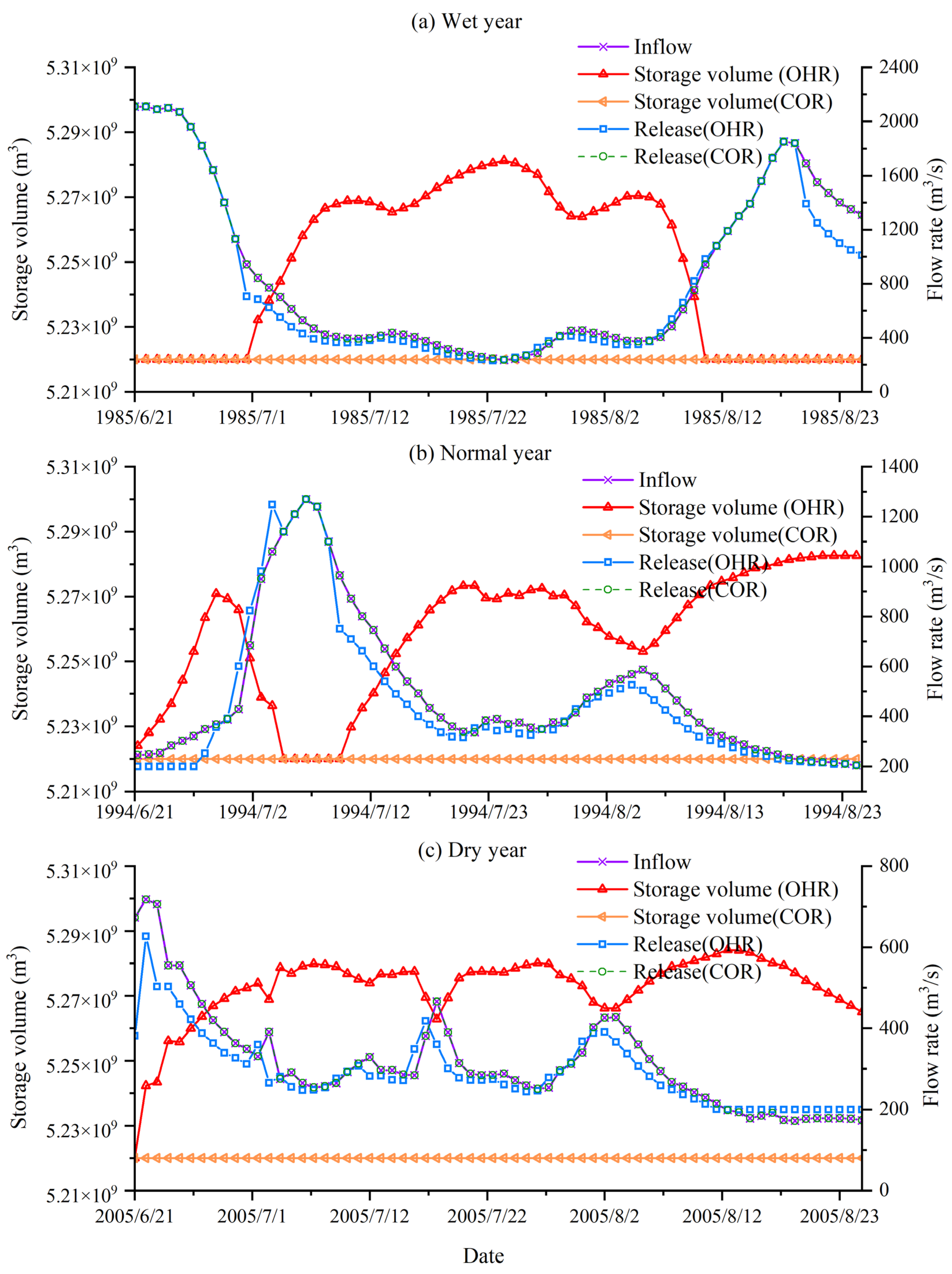
Furthermore, the scheduling processes for three hydrological years were demonstrated in order to investigate storage volume under OHR, with 1985, 1994, and 2005 representing wet, normal, and dry years, respectively. As shown in Figure 13, the storage volume increased from 1 July to 11 August and remained at 5.220 × 109 m3 at the end of the main flood season in 1985, despite being at the flood recession stage, because the forecasted inflow at the end of the main flood season continued to exceed its maximum allowable inflow for DCCS. The storage volume in 1994 and 2005 was raised using OHR almost the whole main flood season, but the raised storage volume at the end of the main flood season in 1994 was greater than that in 2005 (5.282 × 109 m3 versus 5.265 × 109 m3) since the inflow at the end of the main flood season in 2005 was less than the downstream water demand. Over these three years, OHR performance was beneficial in increasing storage capacity and limiting energy losses due to inflow constraints.
5. Conclusions
This study focused on hydro-economic and mathematical analysis and derived the OHR to reveal trade-offs between power generation and flood risk under different forecasted inflows, forecast uncertainties, and risk tolerance. The conclusions are summarized as follows:
- (1)
- Hedging and trade-offs between power generation and flood risk exist during DCCS only when the forecasted inflow is greater than the minimum downstream water demand and less than the inflow that allows power generation in two stages to reach its peak without spilling.
- (2)
- We identified the forecast uncertainty range that allows for hedging between two objectives by calculating the minimum and maximum forecast uncertainties. If the forecast uncertainty is greater than its maximum, reducing flood risk is the unique objective considered by decision-makers. If the forecast uncertainty is less than its minimum, the carryover storage keeping at its upper bounds meets the current flood control standard.
- (3)
- Compared to forecast uncertainty, downstream risk tolerance plays a more important role in determining which case of the OHR is adopted in real-world operations.
- (4)
- In the real-world application, compared with COR, OHR had an excellent performance in power generation improvement in dry years, indicating that OHR can alleviate the energy crisis during dry years.
It should be noted that this method is suitable for areas with less abundant water resources, and extra wet or extra dry regions cannot be applied. Furthermore, some simplifications and assumptions, such as the given weight and forecast errors following a Gaussian distribution and the adaptation to climate change, should be studied in the future.
Author Contributions
Conceptualization, L.Z., W.D. and Y.P.; methodology, L.Z.; software, L.Z., W.D. and S.J.; validation, W.D., curation, L.Z.; writing—original draft preparation, L.Z.; writing—review and editing, J.R.L., W.D. and X.Z.; supervision, G.W. All authors have read and agreed to the published version of the manuscript.
Funding
This work was supported by the National Key Research and Development Project of China (2016YFC0400903), the National Natural Science Foundation of China (Grants No. 51779030, 51709108, 52079015, 51925902, 51709036).
Data Availability Statement
Not applicable.
Acknowledgments
The first author would like to acknowledge the Chinese Scholarship Council (CSC) for supporting her Ph.D. study at the University of California, Davis (UCD).
Conflicts of Interest
The authors declare that they have no conflict of interest.
Nomenclature
| OHR | The optimal hedging rules. |
| DCCS | Dynamic control of carryover storage. |
| FLSV(SL) | Flood-limited storage volume. |
| Δt | One period of two-stage operation. |
| T | Forecast horizon. |
| S0, Sk | Initial storage volume of Stage 1 and storage at the end of Stage k (k = 1, 2). |
| Ik, Rk | Actual inflow and release volume in Stage k (k = 1, 2). |
| , | Forecasted inflow and release volume in Stage 2. |
| ε | Inflow forecasting error in Stage 2. |
| Qthres | The threshold discharge capacity for the downstream safety. |
| δ | Forecasted flood-safety margin. |
| σ | Forecast uncertainty of inflow in Stage 2. |
| Ek | Power generation in stage k (k = 1, 2). |
| SSR(S0), SSR(Sk) | The initial stage-storage relationship water level in Stage 1 and stage-storage relationship at the end of Stage k (k = 1, 2). |
| SDR | Downstream water level. |
| G1, G2 | Power generation and flood risk objectives, respectively. |
| , | Marginal utilities of power generation and flood risk, respectively. |
| ω | The weight is designed for power generation. |
| δmin | Minimum flood-safety margin required for flood risk in Stage 2. |
| Maximum power capacity in Stage k (k = 1, 2). | |
| The lower bound of carryover storage originated from maximum power generation of Stage 1. | |
| The upper bound of carryover storage originated from maximum power generation of Stage 2. | |
| Minimum downstream water demand. | |
| The upper bound of carryover storage originated from downstream water demand of Stage 2. | |
| τr | Risk tolerance. |
| A specific forecasted inflow that triggers the maximum power generation in two stages without spilling when the lower bound of carryover storage is . | |
| A specific forecasted inflow that triggers the maximum power generation in two stages without spilling when the lower bound of carryover storage is SL. | |
| A specific forecasted inflow that triggers the maximum power generation in Stage 2 and downstream water demand constraints at the same time. | |
| The minimum allowable inflow for DCCS application, which is equal to the minimum downstream water demand. | |
| δSWA, | Flood-safety margin and forecasted inflow at the starting hedging point that marginal utility of power generation equals marginal utility of flood risk, i.e., f1() = f2(δSWA). |
| δEWA, | Flood-safety margin and forecasted inflow at the ending hedging point that marginal utility of flood risk equals marginal utility of power generation (), i.e., f1() = f2(δEWA). |
| MUPG(f1(S1)) | Marginal utility of power generation in Stage 1. |
| MUFR (f2(δ)) | Marginal utility of flood risk in Stage 2. |
| σmin, σmax | Minimum and maximum allowed forecast uncertainty for hedging, respectively. |
| dδSWA/dσ | The trend of δSWA as σ increases. |
| dδEWA/dσ | The trend of δEWA as σ increases. |
| d2δSWA/dσ2 | The trend of dδSWA/ dσ as σ increases. |
| d2δEWA/dσ2 | The trend of dδEWA/ dσ as σ increases. |
| Optimal carryover storage from Stage 1 to Stage 2. | |
| δ* | Optimal flood-safety margin in Stage 2. |
| The carryover storage makes the marginal utility of power generation equal minimum marginal utility of flood risk, i.e., f2(δmin) = f1(). | |
| The inflow for situation f2(δmin) = f1(). | |
| The inflow for situation δ = δmin, S1 = . |
Appendix A
According to the definition of δmin, the trend of δmin as σ increases (dδmin/dσ) can be expressed as:
In Equation (A1), dδmin/dσ is positive and monotonically increases because Փ−1(1 − τr) is positive.
dδSWA/dσ illustrates the trend of δSWA as σ increases:
where the molecular δSWA/σ2 − 1/(I1 + ) is smaller than δSWA/σ2; therefore, dδSWA/dσ is greater than δSWA/σ − σ/δSWA. δSWA is defined as the difference between the threshold for downstream levees Qthres and the release at point SWA (i.e., δSWA = Qthres − ), which is larger than the difference between Qthres and the threshold of turbine release capacity () since the maximum power generation binding lead to ≤ Rmax. To ensure downstream safety, the threshold of turbine release capacity was designed far lower than the downstream levee threshold [19], i.e., Qthres − Rmax 2 > σ. As a result, δSWA = Qthres-> σ and dδSWA/dσ > δSWA/σ − σ/δSWA > 0.
d2δSWA/dσ2 illustrates the trend of dδSWA/dσ as σ increases:
To judge the characteristic of d2δSWA/dσ2 for simplicity, assume that δSWA = σ and 1/(I1 + ) = 0. Then, the actual value of d2δSWA/dσ2 is close to (−2/σ) and can be derived since σ < δSWA < σ2, that is, the denominator is one order of σ higher than the numerator.
dδEWA/dσ measures the trend of δEWA as σ increases:
dδEWA/dσ is calculated in the same way as the process in Equation (A2), and δEWA is larger than δSWA based on its definition; hence, dδEWA/dσ > dδSWA/dσ > 0.
d2δEWA/dσ2 measures the trend of dδEWA/dσ as σ increases:
Similar to the trend of d2δSWA/dσ2, −1 < d2δSWA/dσ2 < 0 can be derived.
Appendix B
The optimality conditions change with different limitations working according to Equation (15).
- Without considering δmin.
- 2.
- When < < or < < , f2(δ*) is larger than f2(δSWA) that exceeds MUHG, i.e., f2(δ*) > f2(δSWA) = f1() or f2(δ*) > f2(δSWA) = f1(SL), allocating as much space as possible or all of the space above FLSV, which depends on the lower bound of carryover storage, to accommodate the relative larger inflows to reduce flood risk. The optimal conditions of R.1 under different lower bounds of carryover storage can be written as Equations (A6) and (A7):which suggests little or no water storage and the shadow price of the lower bound for carryover storage is positive, i.e., > 0 or > 0.
When ≤ ≤ , the price shadow of all the inequality constraints is to be zero. We have f1() = f2(δ*), and the optimality conditions of R.2 are:
When ≤ ≤ , we have f1() = f2(δSWA) > f2(δ*), the shadow price of the upper bound of carryover storage is positive (i.e., > 0), and the optimality conditions of R.3 are:
- 3.
- Case 1
When δmin is smaller than δSWA, the optimal conditions are the same as the optimal conditions without considering δmin since it will not alter the space of hedging and decision making.
- 4.
- Case 2
When δSWA ≤ δmin ≤ δEWA and the forecasted inflow satisfies < ≤ or < ≤ , the MUPG exceeds MUFR, i.e., f1() > f1() = f2(δmin), implying that floodwater should be stored after satisfying the minimum flood-safety margin. Under this situation, the shadow price of the minimum safety margin constraint is positive, i.e., > 0, and the optimality conditions are:
The optimal solutions of Case 2-R.2 and Case 2-R.3 are consistent with R.2 and R.3, respectively.
- 5.
- Case 3
δmin is larger than δEWA, illustrating a very small flood risk, and the optimal conditions of Case 3-R.1 and Case 3-R.2 are the same as Equations (A9) and (A10).
References
- Panwar, N.L.; Kaushik, S.C.; Kothari, S. Role of renewable energy sources in environmental protection: A review. Renew. Sust. Energ. Rev. 2011, 15, 1513–1524. [Google Scholar] [CrossRef]
- Fallah-Mehdipour, E.; Bozorg Haddad, O.; Mariño, M.A. Real-time operation of reservoir system by genetic programming. Water Resour. Manag. 2012, 26, 4091–4103. [Google Scholar] [CrossRef]
- Gupta, P.; Singh, S.P.; Jangid, A.; Kumar, R. Characterization of black carbon in the ambient air of Agra, India: Seasonal variation and meteorological influence. Adv. Atmos. Sci. 2017, 34, 1082–1094. [Google Scholar] [CrossRef]
- Kuriqi, A.; Pinheiro, A.N.; Sordo-Ward, A.; Bejarano, M.D.; Garrote, L. Ecological impacts of run-of-river hydropower plants—Current status and prospects on the brink of energy transition. Renew. Sustain. Energy Rev. 2021, 142, 110833. [Google Scholar] [CrossRef]
- Oliveira, R.; Loucks, D.P. Operating rules for multireservoir systems. Water Resour. Res. 1997, 33, 839–852. [Google Scholar] [CrossRef]
- Zhao, J.; Cai, X.; Wang, Z. Optimality conditions for a two-stage reservoir operation problem. Water Resour. Res. 2011, 47, W08503. [Google Scholar] [CrossRef]
- Ortiz-Partida, J.P.; Kahil, T.; Ermolieva, T.; Ermoliev, Y.; Lane, B.; Sandoval-Solis, S.; Wada, Y. A two-stage stochastic optimization for robust operation of multipurpose reservoirs. Water Resour. Manag. 2019, 33, 3815–3830. [Google Scholar] [CrossRef] [Green Version]
- Kelman, J.; Damazio, J.M.; Marien, J.L.; Da Costa, J.P. The determination of flood control volumes in a multireservoir system. Water Resour. Res. 1989, 25, 337–344. [Google Scholar] [CrossRef]
- Shah MA, R.; Rahman, A.; Chowdhury, S.H. Challenges for achieving sustainable flood risk management. J. Flood Risk Manag. 2018, 11, S352–S358. [Google Scholar] [CrossRef] [Green Version]
- Yao, H.; Dong, Z.; Jia, W.; Ni, X.; Chen, M.; Zhu, C.; Li, D. Competitive relationship between flood control and power generation with flood season division: A case study in downstream Jinsha River Cascade Reservoirs. Water 2019, 11, 2401. [Google Scholar]
- Mu, J.; Ma, C.; Zhao, J.; Lian, J. Optimal operation rules of Three-gorge and Gezhouba cascade hydropower stations in flood season. Energy Conv. Manag. 2015, 96, 159–174. [Google Scholar] [CrossRef]
- Shang, Y.; Lu, S.; Ye, Y.; Liu, R.; Shang, L.; Liu, C.; Meng, X.; Li, X.; Fan, Q. China’ energy-water nexus: Hydropower generation potential of joint operation of the Three Gorges and Qingjiang cascade reservoirs. Energy 2018, 142, 14–32. [Google Scholar] [CrossRef]
- Xie, A.; Liu, P.; Guo, S.; Zhang, X.; Jiang, H.; Yang, G. Optimal design of seasonal flood limited water levels by jointing operation of the reservoir and floodplains. Water Resour. Manag. 2018, 32, 179–193. [Google Scholar] [CrossRef]
- Chen, J.; Guo, S.; Li, Y.; Liu, P.; Zhou, Y. Joint operation and dynamic control of flood limiting water levels for cascade reservoirs. Water Resour. Manag. 2013, 27, 749–763. [Google Scholar] [CrossRef]
- Zhou, Y.; Guo, S.; Liu, P.; Xu, C. Joint operation and dynamic control of flood limiting water levels for mixed cascade reservoir systems. J. Hydrol. 2014, 519, 248–257. [Google Scholar] [CrossRef]
- Li, X.; Guo, S.; Liu, P.; Chen, G. Dynamic control of flood limited water level for reservoir operation by considering inflow uncertainty. J. Hydrol. 2010, 391, 124–132. [Google Scholar] [CrossRef]
- Jiang, Z.; Sun, P.; Ji, C.; Zhou, J. Credibility theory based dynamic control bound optimization for reservoir flood limited water level. J. Hydrol. 2015, 529, 928–939. [Google Scholar] [CrossRef]
- Liu, G.; Qin, H.; Shen, Q.; Tian, R.; Liu, Y. Multi-objective optimal scheduling model of dynamic control of flood limit water level for cascade reservoirs. Water 2019, 11, 1836. [Google Scholar] [CrossRef] [Green Version]
- Huang, X.; Xu, B.; Zhong, P.-A.; Yao, H.; Yue, H.; Zhu, F.; Lu, Q.; Sun, Y.; Mo, R.; Li, Z.; et al. Robust multiobjective reservoir operation and risk decision-making model for real-time flood control coping with forecast uncertainty. J. Hydrol. 2022, 605, 127334. [Google Scholar] [CrossRef]
- Gong, Y.; Liu, P.; Cheng, L.; Chen, G.; Zhou, Y.; Zhang, X.; Xu, W. Determining dynamic water level control boundaries for a multi-reservoir system during flood seasons with considering channel storage. J. Flood Risk Manag. 2020, 13, e12586. [Google Scholar] [CrossRef]
- Chen, L.; Singh, V.P.; Lu, W.; Zhang, J.; Zhou, J.; Guo, S. Streamflow forecast uncertainty evolution and its effect on real-time reservoir operation. J. Hydrol. 2016, 540, 712–726. [Google Scholar] [CrossRef]
- Huang, K.; Ye, L.; Chen, L.; Wang, Q.; Dai, L.; Zhou, J.; Singh, V.P.; Huang, M.; Zhang, J. Risk analysis of flood control reservoir operation considering multiple uncertainties. J. Hydrol. 2018, 565, 672–684. [Google Scholar] [CrossRef]
- Nayak, M.A.; Herman, J.D.; Steinschneider, S. Balancing flood risk and water supply in California: Policy search integrating short-term forecast ensembles with conjunctive use. Water Resour. Res. 2018, 54, 7557–7576. [Google Scholar] [CrossRef]
- Lu, J.; Li, G.; Cheng, C.; Liu, B. A long-term intelligent operation and management model of cascade hydropower stations based on chance constrained programming under multi-market coupling. Environ. Res. Lett. 2021, 16, 055034. [Google Scholar] [CrossRef]
- Ouarda, T.B.; Labadie, J.W. Chance-constrained optimal control for multireservoir system optimization and risk analysis. Stoch. Environ. Res. Risk Assess. 2001, 15, 185–204. [Google Scholar] [CrossRef]
- Simonovic, S. Influence of different downstream users on single multipurpose reservoir operation by chance constraints. Can. J. Civ. Eng. 1988, 15, 596–600. [Google Scholar] [CrossRef]
- Ding, W.; Zhang, C.; Peng, Y.; Zeng, R.; Zhou, H.; Cai, X. An analytical framework for flood water conservation considering forecast uncertainty and acceptable risk. Water Resour. Res. 2015, 51, 4702–4726. [Google Scholar] [CrossRef]
- Draper, A.J.; Lund, J.R. Optimal hedging and carryover storage value. J. Water Resour. Plann. Manag. 2004, 130, 83–87. [Google Scholar] [CrossRef] [Green Version]
- You, J.Y.; Cai, X. Hedging rule for reservoir operations: 1. A theoretical analysis. Water Resour. Res. 2008, 44, W01415. [Google Scholar] [CrossRef]
- You, J.Y.; Cai, X. Hedging rule for reservoir operations: 2. A numerical model. Water Resour. Res. 2008, 44, W01416. [Google Scholar] [CrossRef]
- Zhao, T.; Zhao, J.; Liu, P.; Lei, X. Evaluating the marginal utility principle for long-term hydropower scheduling. Energy Conv. Manag. 2015, 106, 213–223. [Google Scholar] [CrossRef]
- Tan, Q.F.; Wen, X.; Fang, G.H.; Wang, Y.Q.; Qin, G.H.; Li, H.M. Long-term optimal operation of cascade hydropower stations based on the utility function of the carryover potential energy. J. Hydrol. 2020, 580, 124359. [Google Scholar] [CrossRef]
- Li, H.; Liu, P.; Guo, S.; Ming, B.; Cheng, L.; Zhou, Y. Hybrid two-stage stochastic methods using scenario-based forecasts for reservoir refill operations. J. Water Resour. Plann. Manag. 2018, 144, 04018080. [Google Scholar] [CrossRef]
- Wan, W.; Zhao, J.; Lund, J.R.; Zhao, T.; Lei, X.; Wang, H. Optimal hedging rule for reservoir refill. J. Water Resour. Plann. Manag. 2016, 142, 04016051. [Google Scholar] [CrossRef]
- Zhang, X.; Liu, P.; Xu, C.-Y.; Gong, Y.; Cheng, L.; He, S. Real-time reservoir flood control operation for cascade reservoirs using a two-stage flood risk analysis method. J. Hydrol. 2019, 577, 123954. [Google Scholar] [CrossRef]
- Quinn, J.D.; Reed, P.M.; Giuliani, M.; Castelletti, A. Rival framings: A framework for discovering how problem formulation uncertainties shape risk management trade-offs in water resources systems. Water Resour. Res. 2017, 53, 7208–7233. [Google Scholar] [CrossRef]
- Jain, S.K. Investigating the behavior of statistical indices for performance assessment of a reservoir. J. Hydrol. 2010, 391, 90–96. [Google Scholar] [CrossRef]
- Kim, T.H.; Kim, B.; Han, K.Y. Application of fuzzy TOPSIS to flood hazard mapping for levee failure. Water 2019, 11, 592. [Google Scholar] [CrossRef] [Green Version]
- Valipour, M.; Banihabib, M.E.; Behbahani, S.M.R. Comparison of the ARMA, ARIMA, and the autoregressive artificial neural network models in forecasting the monthly inflow of Dez dam reservoir. J. Hydrol. 2013, 476, 433–441. [Google Scholar] [CrossRef]
- Pérez-Díaz, J.I.; Wilhelmi, J.R. Assessment of the economic impact of environmental constraints on short-term hydropower plant operation. Energy Policy 2010, 38, 7960–7970. [Google Scholar] [CrossRef]
- Georgakakos, K.P.; Graham, N.E. Potential benefits of seasonal inflow prediction uncertainty for reservoir release decisions. J. Appl. Meteorol. Climatol. 2008, 47, 1297–1321. [Google Scholar] [CrossRef]
- Jane, J.Y. Necessary and sufficient optimality conditions for mathematical programs with equilibrium constraints. J. Math. Anal. Appl. 2005, 307, 350–369. [Google Scholar]
- Kyparisis, J. On uniqueness of Kuhn-Tucker multipliers in nonlinear programming. Math. Program. 1985, 32, 242–246. [Google Scholar] [CrossRef]
- Herskovits, J. Feasible direction interior-point technique for nonlinear optimization. J. Optim. Theory Appl. 1998, 99, 121–146. [Google Scholar] [CrossRef]
- Zeng, X.; Lund, J.R.; Cai, X. Linear Versus Nonlinear (Convex and Concave) Hedging Rules for Reservoir Optimization Operation. Water Resour. Res. 2021, 57, e2020WR029160. [Google Scholar] [CrossRef]
Figure 1.
The location of the Nierji basin in China.

Figure 2.
Illustration of the dynamic rolling-horizon operation scheme.

Figure 3.
The variation of MUPG under different lower bounds as carryover storage increases when the forecasted inflow ranges from to >: (a) lower bound is ( ≥ SL); (b) lower bound is SL ( < SL).
Figure 3.
The variation of MUPG under different lower bounds as carryover storage increases when the forecasted inflow ranges from to >: (a) lower bound is ( ≥ SL); (b) lower bound is SL ( < SL).

Figure 4.
The relationship between MUFR (left, f2) and MUPG (right, f1) when the inflow is relatively large and the lower bound is without considering minimum flood-safety margin constraint.
Figure 4.
The relationship between MUFR (left, f2) and MUPG (right, f1) when the inflow is relatively large and the lower bound is without considering minimum flood-safety margin constraint.

Figure 8.
The relationship between marginal utilities of (left) flood risk (f2) and (right) power generation (f1) with under three values of δmin when the lower bound of carryover storage is : (a) Case 1: δmin < δSWA, (b) Case 2: δSWA ≤ δmin ≤ δEWA, (c) Case 3: δEWA < δmin.
Figure 8.
The relationship between marginal utilities of (left) flood risk (f2) and (right) power generation (f1) with under three values of δmin when the lower bound of carryover storage is : (a) Case 1: δmin < δSWA, (b) Case 2: δSWA ≤ δmin ≤ δEWA, (c) Case 3: δEWA < δmin.

Figure 9.
The relationship between marginal utilities of (left) flood risk (f2) and (right) power generation (f1) under three values of δmin when the lower bound of carryover storage is SL: (a) Case 1: δmin < δSWA, (b) Case 2: δSWA ≤ δmin ≤ δEWA, (c) Case 3: δmin > δEWA.
Figure 9.
The relationship between marginal utilities of (left) flood risk (f2) and (right) power generation (f1) under three values of δmin when the lower bound of carryover storage is SL: (a) Case 1: δmin < δSWA, (b) Case 2: δSWA ≤ δmin ≤ δEWA, (c) Case 3: δmin > δEWA.

Figure 5.
Relationship between MUFR (left, f2) and MUPG (right, f1) under minimum and maximum forecast uncertainties when the lower bound is : (a) σ = σmin; (b) σ = σmax.
Figure 5.
Relationship between MUFR (left, f2) and MUPG (right, f1) under minimum and maximum forecast uncertainties when the lower bound is : (a) σ = σmin; (b) σ = σmax.

Figure 6.
The relationship between MUFR (left, f2) and MUPG (right, f1) under minimum and maximum forecast uncertainties when the lower bound is SL: (a) σ = σmin; (b) σ = σmax.
Figure 6.
The relationship between MUFR (left, f2) and MUPG (right, f1) under minimum and maximum forecast uncertainties when the lower bound is SL: (a) σ = σmin; (b) σ = σmax.

Figure 7.
The minimum flood-safety margin (δmin) changes with forecast uncertainty (σ) and risk tolerance (τr), and flood-safety margins the at start and end of hedging (δSWA and δEWA) vary with different σ.
Figure 7.
The minimum flood-safety margin (δmin) changes with forecast uncertainty (σ) and risk tolerance (τr), and flood-safety margins the at start and end of hedging (δSWA and δEWA) vary with different σ.

Figure 10.
The bounds of carryover storage under different inflows: (a) and vary with increasing I1 (left); (b) varies with increasing (right).
Figure 10.
The bounds of carryover storage under different inflows: (a) and vary with increasing I1 (left); (b) varies with increasing (right).

Figure 11.
The OHR for three cases caused by three risk tolerances τr when confronting different inflows: (a) the optimal carryover storage () and (b) the optimal flood-safety margin (δ*).
Figure 11.
The OHR for three cases caused by three risk tolerances τr when confronting different inflows: (a) the optimal carryover storage () and (b) the optimal flood-safety margin (δ*).

Figure 12.
The maximum flood risk using COR and OHR from 1981 to 2010.

Figure 13.
Comparison of storage volume for OHR and COR under a: (a) wet year; (b) normal year; (c) dry year.
Figure 13.
Comparison of storage volume for OHR and COR under a: (a) wet year; (b) normal year; (c) dry year.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
The OHR for different inflows under various forecast uncertainty and risk tolerance.
| Cases | The Forecasted Inflow in Stage 2 for DCCS | The Optimal Solutions |
|---|---|---|
| Case 1: δmin < δSWA | R.1: < ≤ or < ≤ . | Little water or no water is stored, and carryover storage is kept at the lower bound of DCCS ( = or = SL). |
| R.2: < ≤ . | Hydropower generation and flood risk are balanced (f1() = f2(δ*)). | |
| R.3: < ≤ . | Carryover storage volume remains at the upper bound of DCCS ( = ). | |
| Case 2: δSWA ≤ δmin ≤ δEWA | R.1: < ≤ or < ≤ . | After meeting δmin, the inflow from Stage 1 is carried over to Stage 2 ( = Qthres + SL − − δmin). |
| R.2: < ≤ . | The optimal solutions are the same as in Case 1-R.2. | |
| R.3: < ≤ . | The optimal solutions are the same as in Case 1-R.3. | |
| Case 3: δmin > δEWA | R.1: < ≤ or < ≤ . | The optimal solutions are the same as in Case 2-R.1. |
| R.2: < ≤ . | The optimal solutions are the same as in Case 1-R.3. |
Table 2.
The range of forecast uncertainty and risk tolerance corresponds to three cases.
| Cases | Range of τr σ = 2.368 × 107 | Range of σ (×107) | ||
|---|---|---|---|---|
| τr = 5 × 10−3 | τr = 4.50 × 10−6 | τr = 7.93 × 10−7 | ||
| Case 1: δmin < δSWA | (5.410 × 10−6, 0.500) | [2.309, 5.450] | -- | -- |
| Case 2: δSWA ≤ δmin ≤δEWA | [3.730 × 10−6, 5.410 × 10−6] | -- | [2.309, 3.456], [3.974, 5.450] | -- |
| Case 3: δmin > δEWA | (0.000, 5.410 × 10−6) | -- | (3.456, 3.974) | [2.309, 5.450] |
Table 3.
Comparison of the power generation between COR and OHR (108 kWh).
| Methods | Annual Average | Flood Season | Non-Flood Season | Wet Year | Normal Year | Dry Year |
|---|---|---|---|---|---|---|
| COR | 6.36 | 3.23 | 3.13 | 7.93 | 6.57 | 4.63 |
| OHR | 6.62 | 3.34 | 3.28 | 8.15 | 6.74 | 4.99 |
| Change | 0.26 | 0.11 | 0.15 | 0.22 | 0.17 | 0.33 |
| Rate | 4.09% | 4.02% | 4.79% | 2.77% | 2.59% | 7.13% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Zhang, L.; Lund, J.R.; Ding, W.; Zhang, X.; Jin, S.; Wang, G.; Peng, Y. An Analytical Framework for Investigating Trade-Offs between Reservoir Power Generation and Flood Risk. Water 2022, 14, 3841. https://doi.org/10.3390/w14233841
AMA Style
Zhang L, Lund JR, Ding W, Zhang X, Jin S, Wang G, Peng Y. An Analytical Framework for Investigating Trade-Offs between Reservoir Power Generation and Flood Risk. Water. 2022; 14(23):3841. https://doi.org/10.3390/w14233841
Chicago/Turabian StyleZhang, Lin, Jay R. Lund, Wei Ding, Xiaoli Zhang, Sifan Jin, Guoli Wang, and Yong Peng. 2022. "An Analytical Framework for Investigating Trade-Offs between Reservoir Power Generation and Flood Risk" Water 14, no. 23: 3841. https://doi.org/10.3390/w14233841
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.