
Investigations of Multi-Platform Data for Developing an Integrated Flood Information System in the Kalu River Basin, Sri Lanka
 , ,
, ,  ,
,
Abstract
:1. Introduction
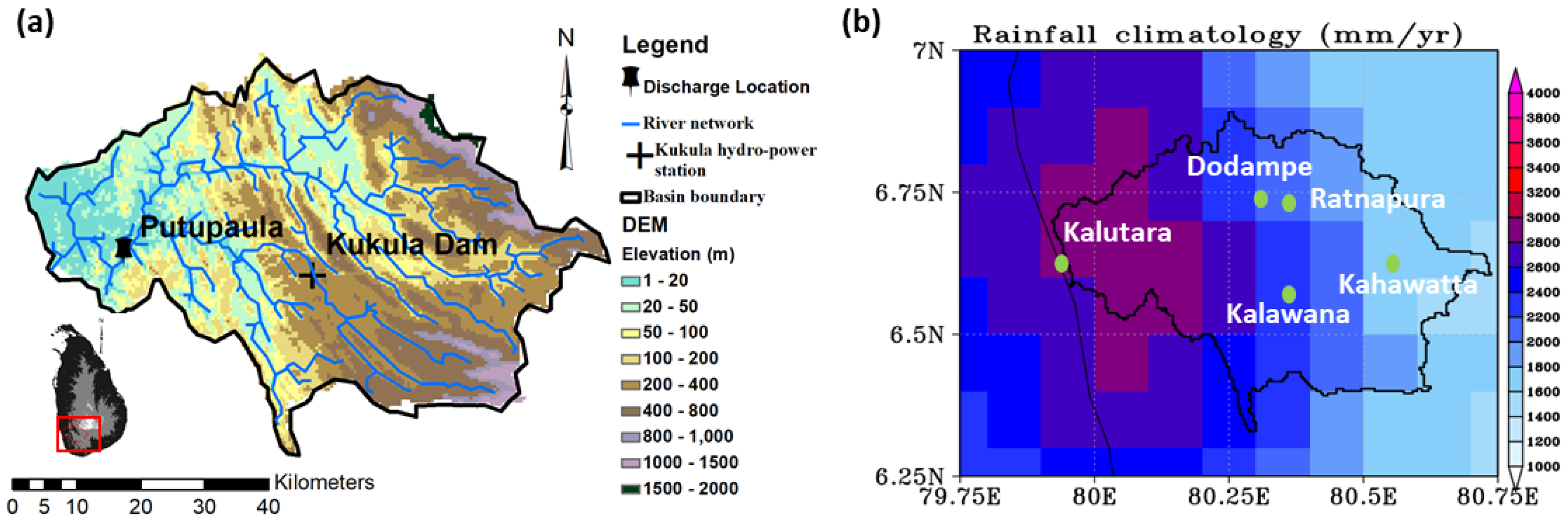
2. The Kalu River basin of Sri Lanka
3. Flood Information System, Data, and Model Set-Up
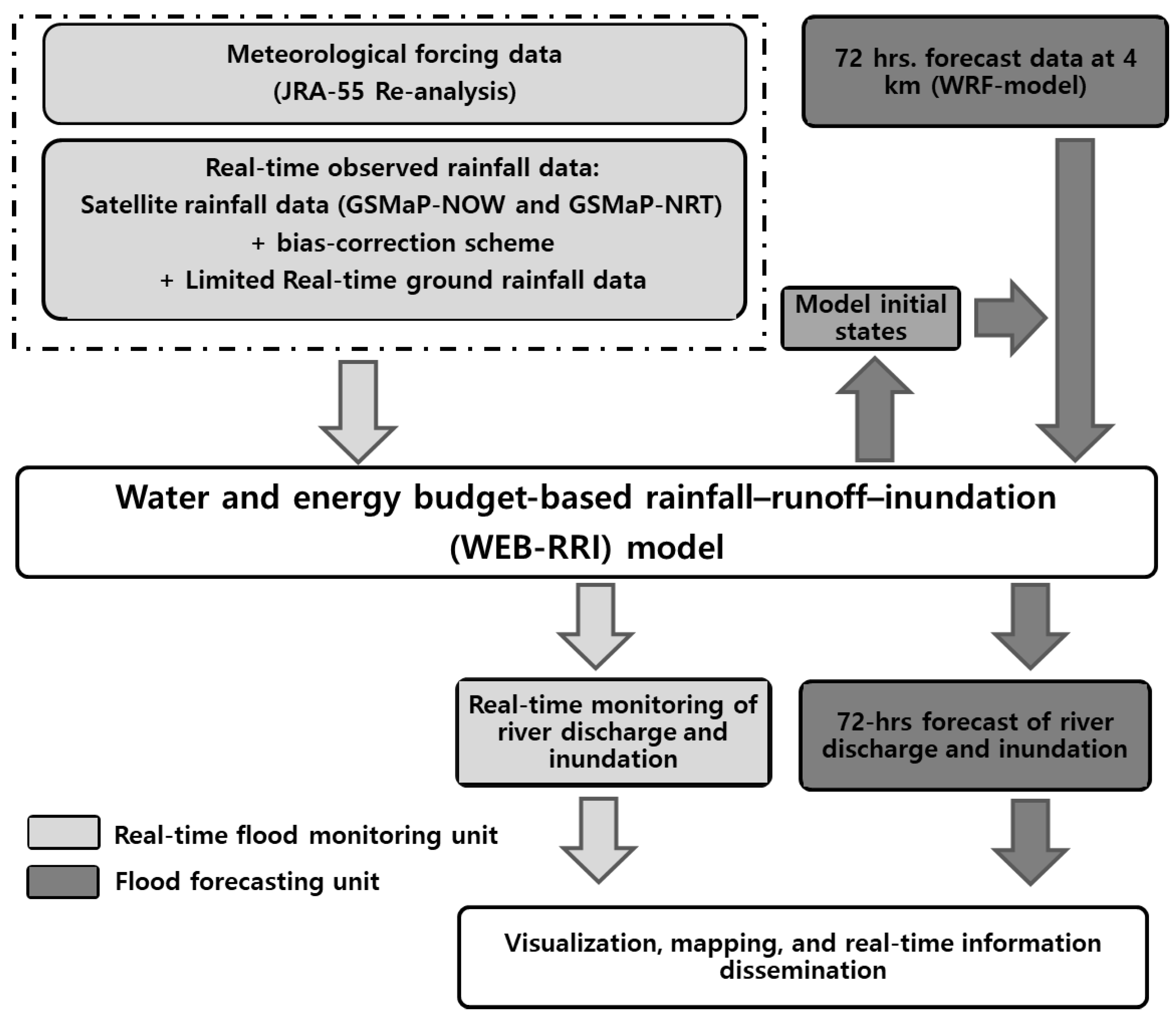
3.1. System Components and Data Integration
3.2. Meteorological Data
3.2.1. Japanese Reanalysis (JRA) Data
3.2.2. In-Situ Rainfall
3.2.3. Satellite Rainfall Products and Bias Correction
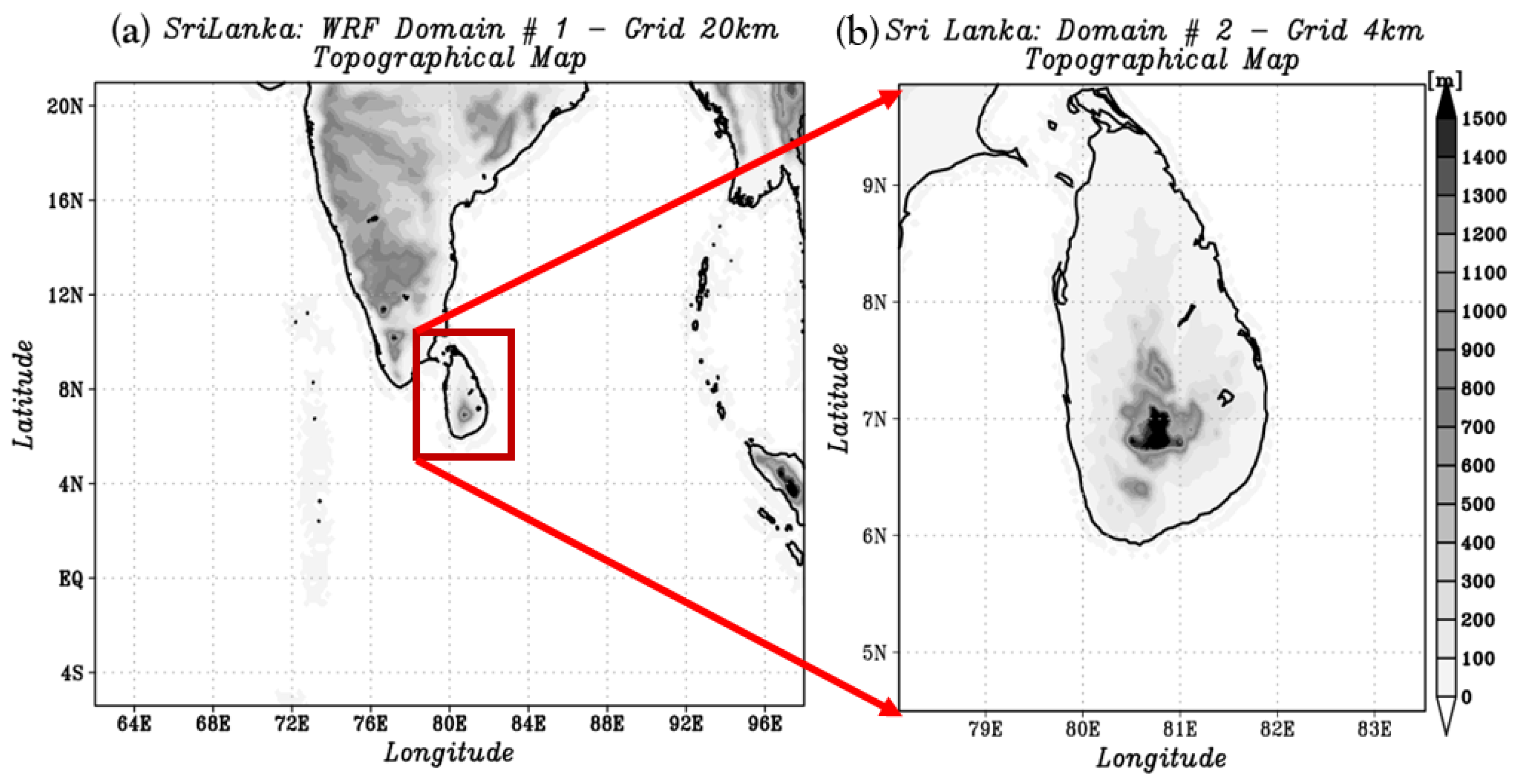
3.2.4. Meteorological Rainfall Forecasts
3.3. Hydrological Data and Model
3.3.1. Hydrological Data
Topographic Data, Soil Type, Land Use, and Vegetation Data
Discharge and Inundation Data
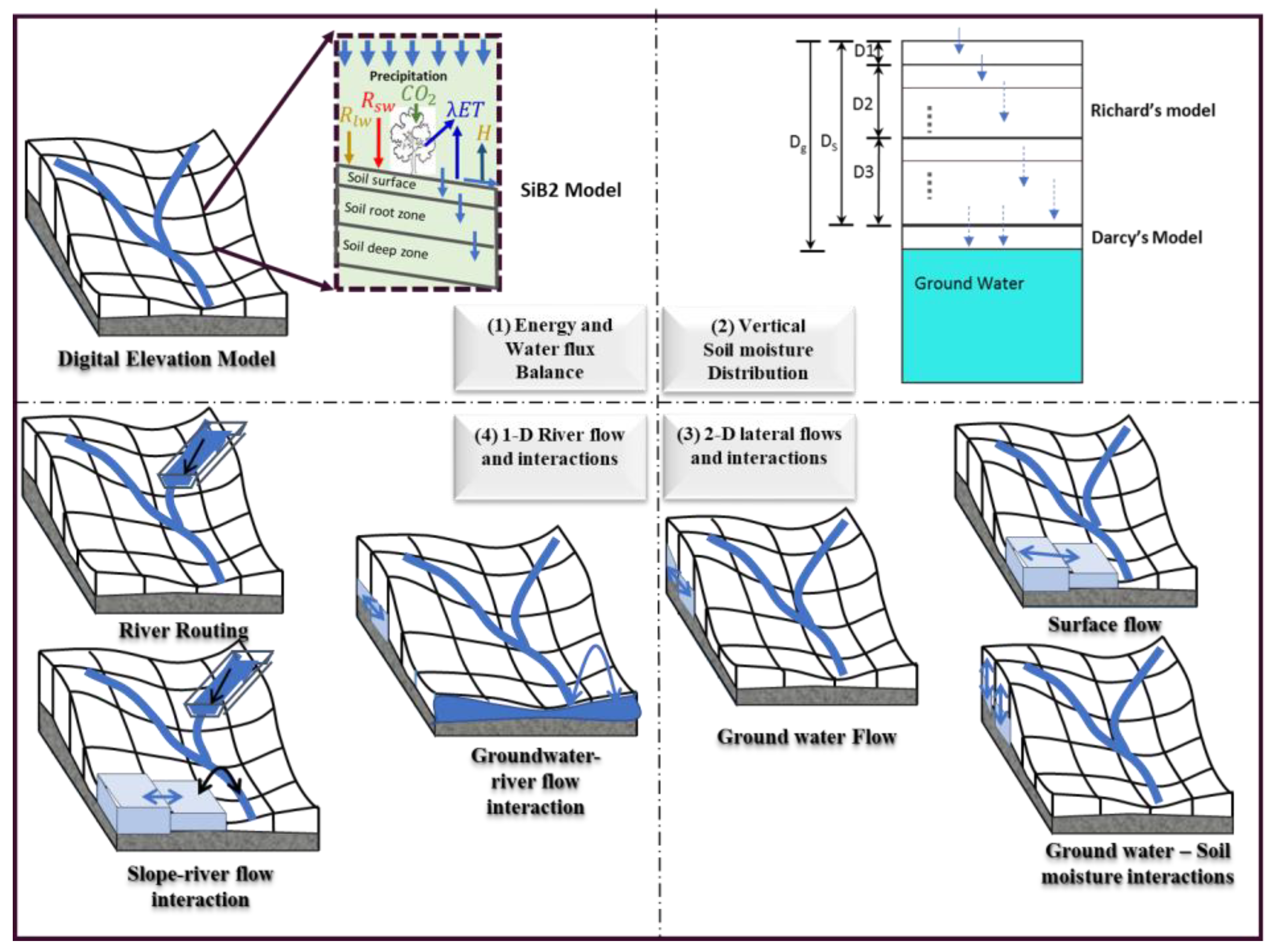
3.3.2. Hydrological Model and Model Setup
3.4. Evaluation Indices
3.4.1. Rainfall and Discharge Evaluation Indices
3.4.2. Flood Extent Evaluation Indices
4. Results
4.1. Rainfall Observation and Forecasts
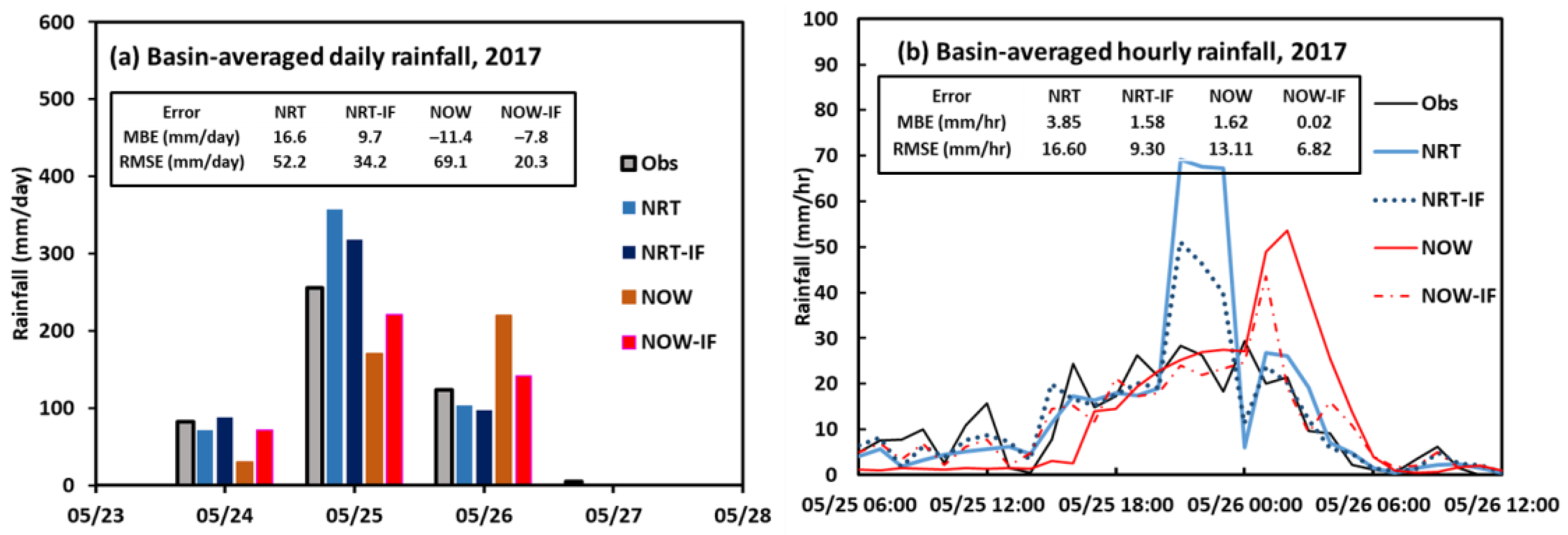
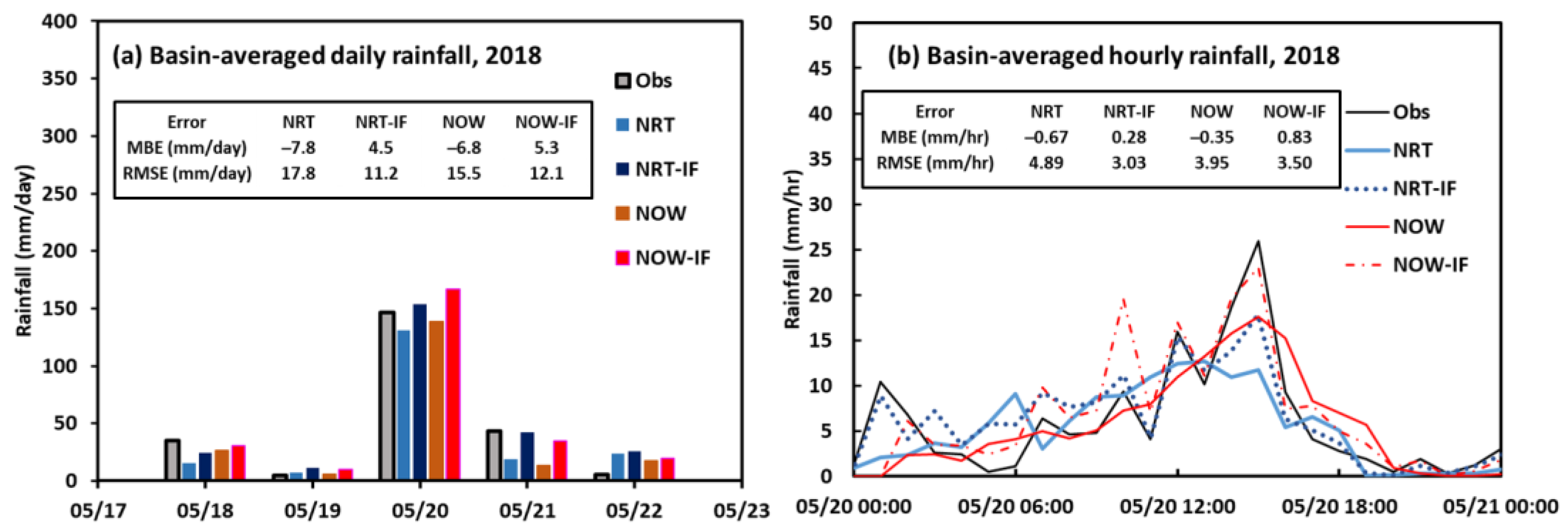
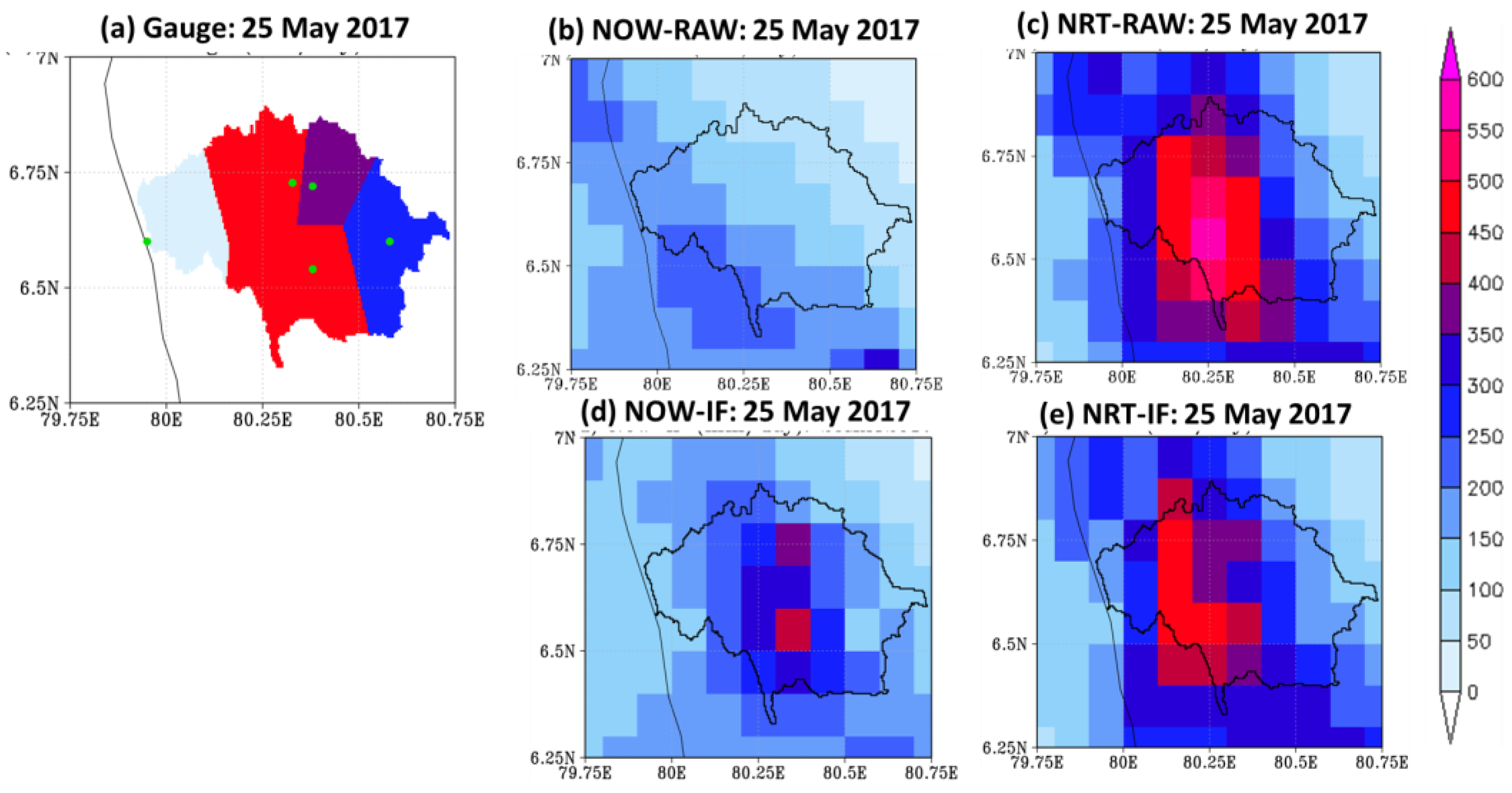
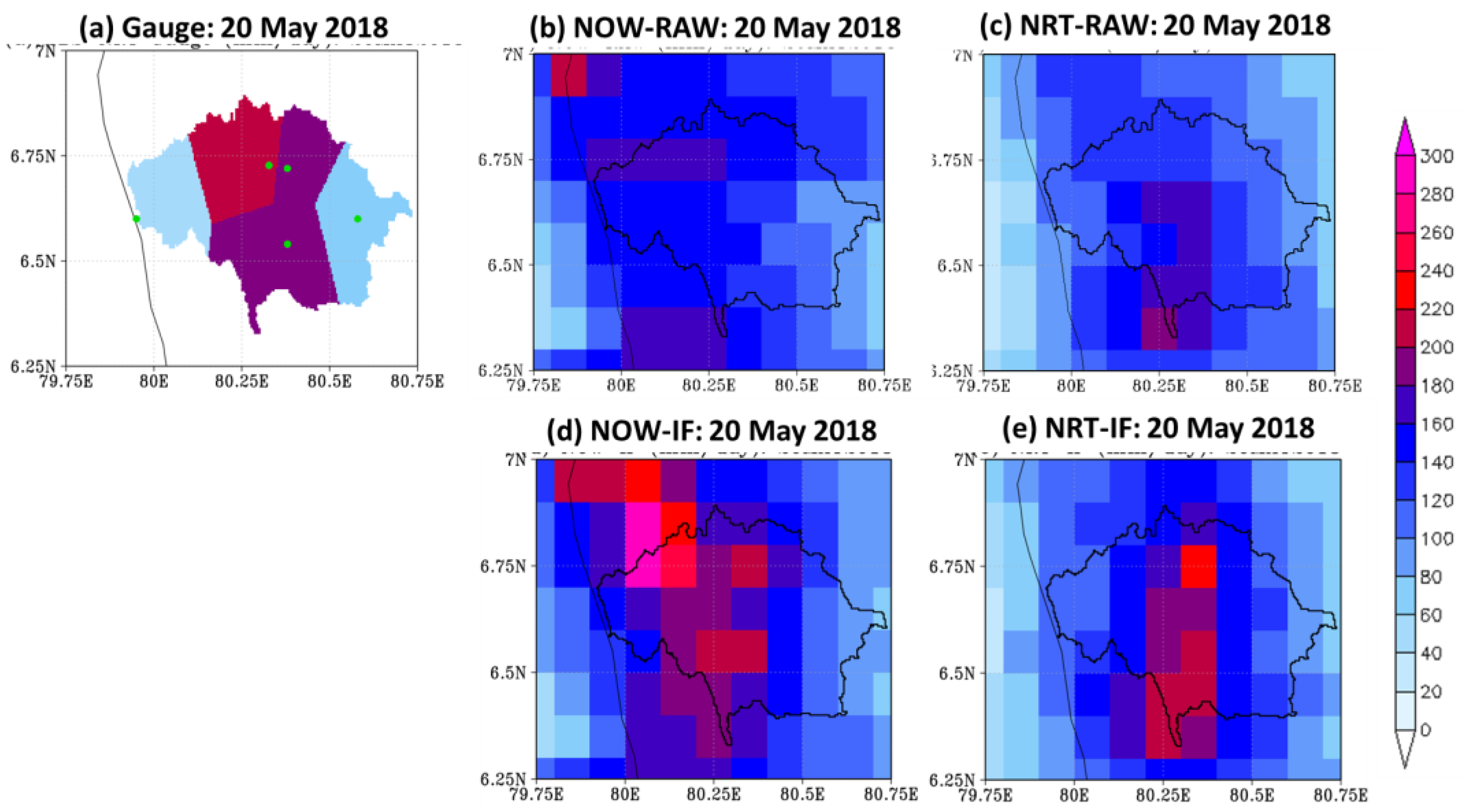
4.1.1. Satellite Rainfall (GSMaP) Products
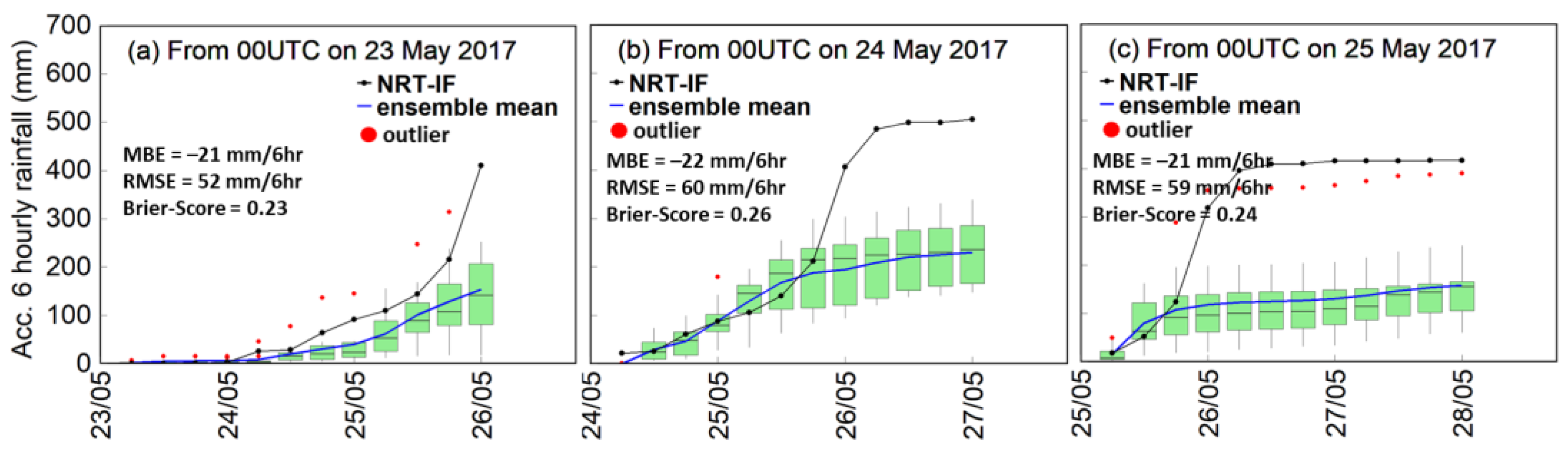
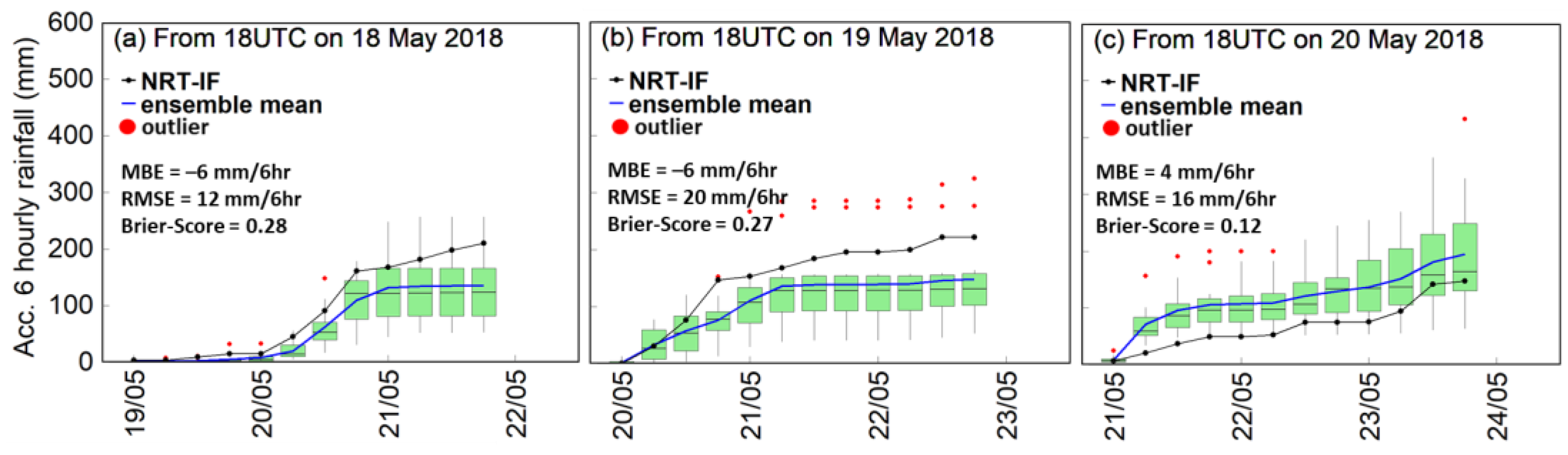
4.1.2. Ensemble Rainfall Forecasts
4.2. Comparison of Hydrological Simulations and Forecasts of River Discharges
4.2.1. Hydrological Simulations Driven by GSMaP Products
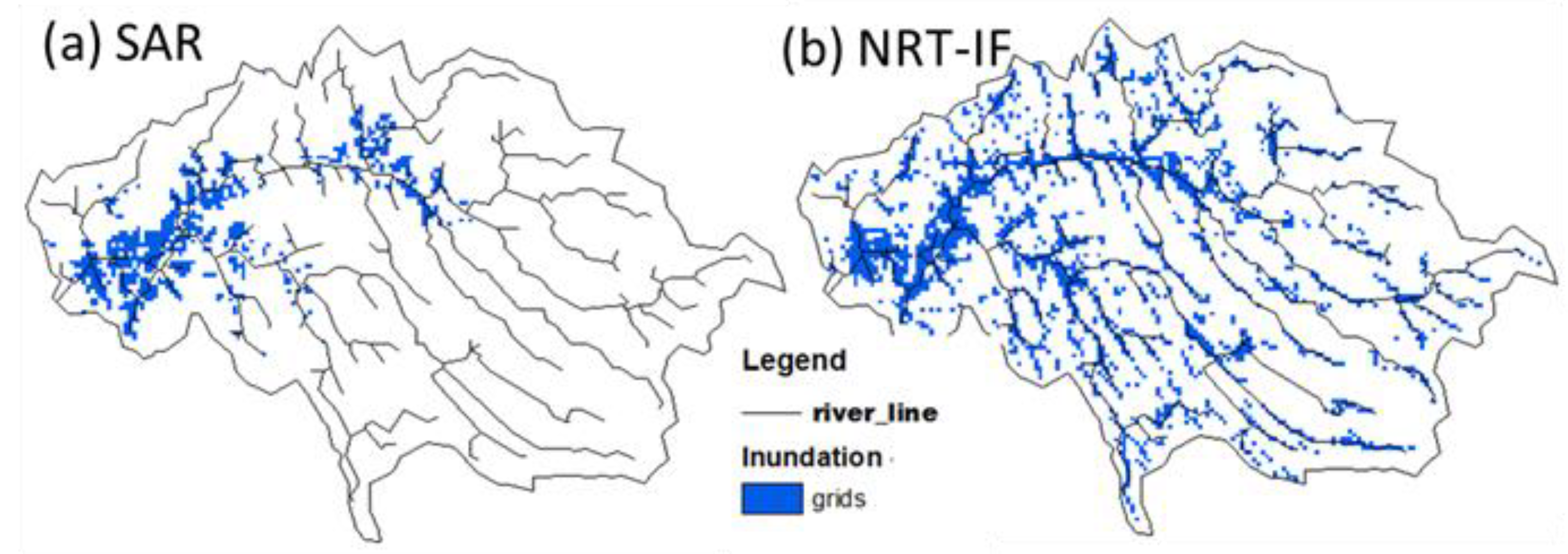
4.2.2. Inundation Extents Driven by the GSMaP Products
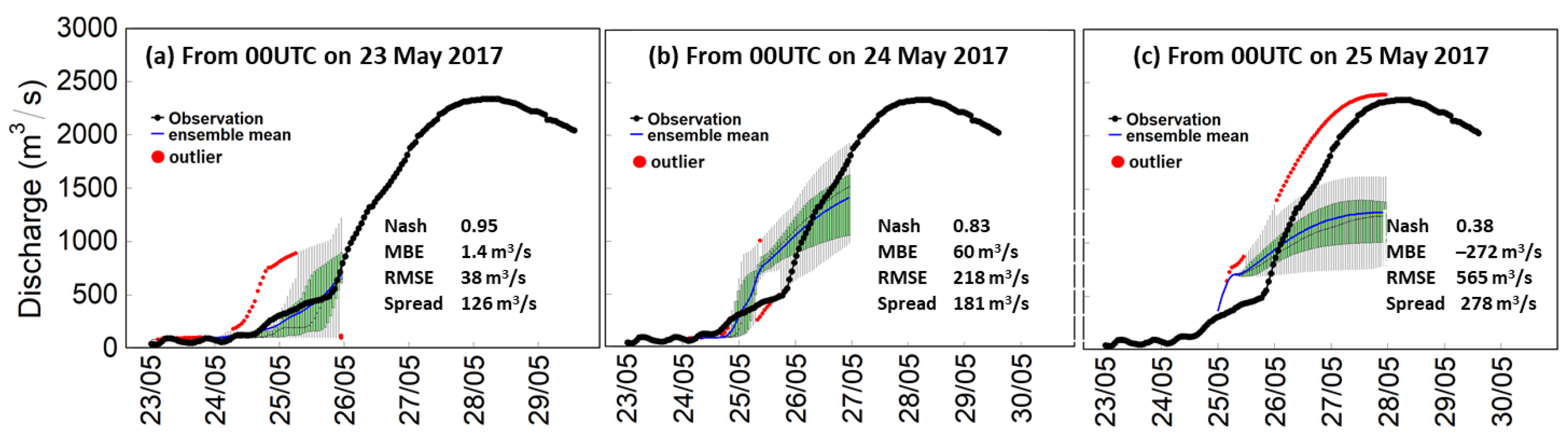
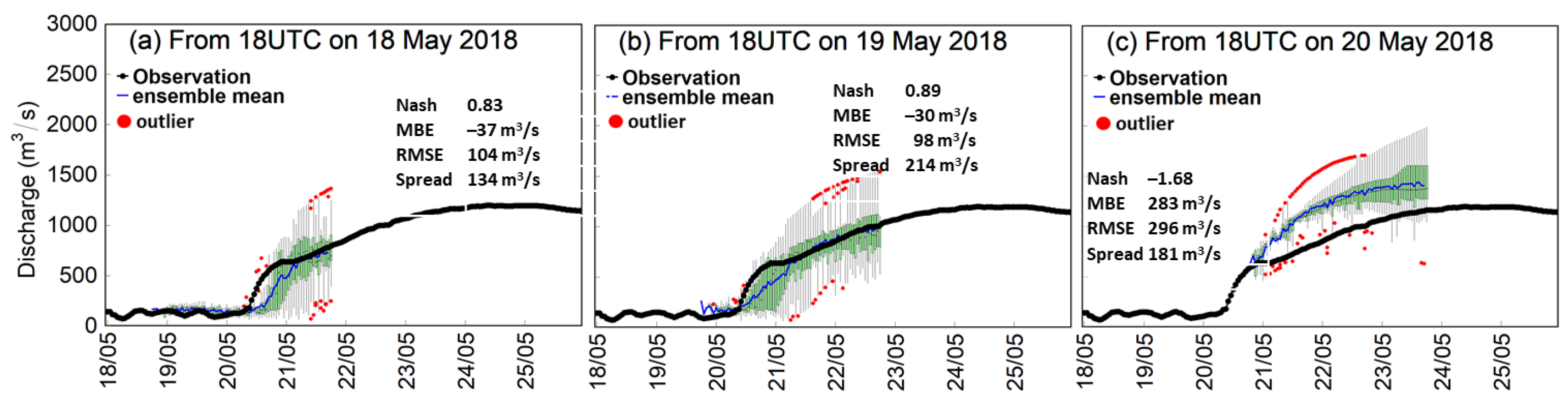
4.2.3. Hydrological Forecasts Driven by the Ensemble Rainfall Forecasts
5. Discussions
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Hirabayashi, Y.; Mahendran, R.; Koirala, S.; Konoshima, L.; Yamazaki, D.; Watanabe, S.; Kim, H.; Kanae, S. Global flood risk under climate change. Nat. Clim. Chang. 2013, 3, 816–821. [Google Scholar] [CrossRef]
- IPCC. The Physical Science Basis. Contribution of Working Group I to the Sixth Assessment Report of the Intergovernmental Panel on Climate Change; Cambridge University Press: Cambridge, UK; New York, NY, USA, 2021; p. 2391. [Google Scholar] [CrossRef]
- Winsemius, H.C. Global drivers of future river flood risk. Nat. Clim. Chang. 2015, 6, 381–385. [Google Scholar] [CrossRef] [Green Version]
- United Nations International Strategy for Disaster Reduction (UNISDR). Economic Losses, Poverty and Disasters: 1998–2017; ISDR: Geneva, Switzerland, 2018; p. 31. Available online: https://www.unisdr.org/files/61119_credeconomiclosses.pdf (accessed on 12 March 2023).
- Perera, D.; Seidou, O.; Agnihotri, J.; Mehmood, H.; Rasmy, M. Challenges and Technical Advances in Flood Early Warning Systems (FEWSs), in Flood Impact Mitigation and Resilience Enhancement; IntechOpen: London, UK, 2020; Available online: https://www.intechopen.com/chapters/72571 (accessed on 12 March 2023).
- UN Early Warning Action Plan at COP27. Available online: https://public.wmo.int/en/media/press-release/early-warnings-all-action-plan-unveiled-cop27 (accessed on 12 March 2023).
- Sanchez Lozano, J.; Romero Bustamante, G.; Hales, R.C.; Nelson, E.J.; Williams, G.P.; Ames, D.P.; Jones, N.L. A Streamflow Bias Correction and Performance Evaluation Web Application for GEOGloWS ECMWF Streamflow Services. Hydrology 2021, 8, 71. [Google Scholar] [CrossRef]
- Werner, M.; Schellekens, J.; Gijsbers, P.; van Dijk, M.; van den Akker, O.; Heynert, K. The Delft-FEWS flow forecasting system. Environ. Modell. Softw. 2012, 40, 65–77. [Google Scholar] [CrossRef] [Green Version]
- Alfieri, L.; Burek, P.; Dutra, E.; Krzeminski, B.; Muraro, D.; Thielen, J.; Pappenberger, F. GloFAS-global ensemble streamflow forecasting and flood early warning. Hydrol. Earth Syst. Sci. 2013, 17, 1161–1175. [Google Scholar] [CrossRef] [Green Version]
- Lavers, D.A.; Harrigan, S.; Andersson, E.; Richardson, D.S.; Prudhomme, C.; Pappenberger, F. A vision for improving global flood forecasting. Environ. Res. Lett. 2019, 14, 121002. [Google Scholar] [CrossRef] [Green Version]
- Demargne, J.; Wu, L.; Regonda, S.K.; Brown, J.D.; Lee, H.; He, M.; Seo, D.-J.; Hartman, R.; Herr, H.D.; Fresch, M.; et al. The science of NOAA’s operational hydrologic ensemble forecast service. Bull. Am. Meteorol. Soc. 2014, 95, 79–98. [Google Scholar] [CrossRef]
- Thielen, J.; Bartholmes, J.; Ramos, M.H.; de Roo, A. The European Flood Alert System—Part 1: Concept and development. Hydrol. Earth Syst. Sci. 2009, 13, 125–140. [Google Scholar] [CrossRef] [Green Version]
- Bartholmes, J.C.; Thielen, J.; Ramos, M.H.; Gentilini, S. The European flood alert system EFAS Part 2: Statistical skill assessment of probabilistic and deterministic operational forecasts. Hydrol. Earth Syst. Sci. 2009, 13, 141–153. [Google Scholar] [CrossRef] [Green Version]
- Emerton, R.E.; Stephens, E.M.; Pappenberger, F.; Pagano, T.C.; Weerts, A.H.; Wood, A.W.; Salamon, P.; Brown, J.D.; Hjerdt, N.; Donnelly, C.; et al. Continental and global scale flood forecasting systems. Wiley Interdiscip. Rev. Water 2016, 3, 391–418. [Google Scholar] [CrossRef] [Green Version]
- Sayama, T.; Yamada, M.; Sugawara, Y.; Yamazaki, D. Ensemble flash flood predictions using a high-resolution nationwide distributed rainfall-runoff model: Case study of the heavy rain event of July 2018 and Typhoon Hagibis in 2019. Prog. Earth Planet Sci. 2020, 7, 75. [Google Scholar] [CrossRef]
- Ma, W.; Ishitsuka, Y.; Takeshima, A.; Hibino, K.; Yamazaki, D.; Yamamoto, K.; Kachi, M.; Oki, R.; Oki, T.; Yoshimura, K. Applicability of a nationwide flood forecasting system for Typhoon Hagibis 2019. Sci. Rep. 2021, 11, 10213. [Google Scholar] [CrossRef] [PubMed]
- Hoedjes, J.C.B.; Kooiman, A.; Maathuis, B.H.P.; Said, M.Y.; Becht, R.; Limo, A.; Mumo, M.; Nduhiu-Mathenge, J.; Shaka, A.; Su, B. A Conceptual Flash Flood Early Warning System for Africa, Based on Terrestrial Microwave Links and Flash Flood Guidance. ISPRS Int. J. Geo-Inf. 2014, 3, 584–598. [Google Scholar] [CrossRef] [Green Version]
- Chitwatkulsiri, D.; Miyamoto, H.; Irvine, K.N.; Pilailar, S.; Loc, H.H. Development and Application of a Real-Time Flood Forecasting System (RTFlood System) in a Tropical Urban Area: A Case Study of Ramkhamhaeng Polder, Bangkok, Thailand. Water 2022, 14, 1641. [Google Scholar] [CrossRef]
- Manzoor, Z.; Ehsan, M.; Khan, M.B.; Manzoor, A.; Akhter, M.M.; Sohail, M.T.; Hussain, A.; Shafi, A.; Abu-Alam, T.; Abioui, M. Floods and flood management and its socio-economic impact on Pakistan: A review of the empirical literature. Front. Environ. Sci. 2022, 10, 1–14. [Google Scholar] [CrossRef]
- Smith, P.J.; Brown, S.; Dugar, S. Community Based Early Warning Systems for flood risk mitigation in Nepal. Nat. Hazards Earth Syst. Sci. 2017, 17, 423–437. [Google Scholar] [CrossRef] [Green Version]
- Sai, F.; Cumiskey, L.; Weerts, A.; Bhattacharya, B.; Khan, R. Towards impact-based flood forecasting and warning in Bangladesh: A case study at the local level in Sirajganj district. Nat. Hazards Earth Syst. Sci. Discuss. 2018, 2018, 1–20. [Google Scholar] [CrossRef]
- Nanditha, J.; Mishra, V. On the need of ensemble flood forecast in India. Water Secur. 2021, 12, 100086. [Google Scholar] [CrossRef]
- Tan, J.; Petersen, W.A.; Kirstetter, P.E.; Tian, Y. Performance of IMERG as a function of spatiotemporal scale. J. Hydrometeorol. 2017, 18, 307–319. [Google Scholar] [CrossRef]
- Skofronick-Jackson, G.; Kirschbaum, D.; Petersen, W.; Huffman, G.; Kidd, C.; Stocker, E.; Kakar, R. The Global Precipitation Measurement (GPM) mission’s scientific achievements and societal contributions: Reviewing four years of advanced rain and snow observations. Quart. J. Roy. Meteor. Soc. 2018, 144, 27–48. [Google Scholar] [CrossRef] [Green Version]
- Huffman, G.J.; Bolvin, D.T.; Braithwaite, D.; Hsu, K.; Joyce, R.; Kidd, C.; Nelkin, E.J.; Sorooshian, S.; Tan, J.; Xie, P. Algorithm Theoretical Basis Document (ATBD) Version 5.2 for the NASA Global Precipitation Measurement (GPM) Integrated Multi-satellitE Retrievals for GPM (I-MERG); GPM Project 2019; NASA: Greenbelt, MD, USA, 2019; p. 38. Available online: https://gpm.nasa.gov/sites/default/files/document_files/IMERG_ATBD_V06.pdf (accessed on 12 March 2023).
- Kubota, T.; Aonashi, K.; Ushio, T.; Shige, S.; Takayabu, Y.N.; Kachi, M.; Arai, Y.; Tashima, T.; Masaki, T.; Kawamoto, N.; et al. Global Satellite Mapping of Precipitation (GSMaP) Products in the GPM Era. In Satellite Precipitation Measurement. Advances in Global Change Research; Levizzani, V., Kidd, C., Kirschbaum, D., Kummerow, C., Nakamura, K., Turk, F., Eds.; Springer: Cham, Switzerland, 2020; Volume 67, pp. 355–373. [Google Scholar]
- Khairul, I.M.; Mastrantonas, N.; Rasmy, M.; Koike, T.; Takeuchi, K. Inter-Comparison of Gauge-Corrected Global Satellite Rainfall Estimates and Their Applicability for Effective Water Resource Management in a Transboundary River Basin: The Case of the Meghna River Basin. Remote Sens. 2018, 10, 828. [Google Scholar] [CrossRef] [Green Version]
- Mastrantonas, N.; Bhattacharya, B.; Shibuo, Y.; Rasmy, M.; Espinoza-Dávalos, G.; Solomatine, D. Evaluating the Benefits of Merging Near-Real-Time Satellite Precipitation Products: A Case Study in the Kinu Basin Region, Japan. J. Hydrometeorol. 2019, 20, 1213–1233. [Google Scholar] [CrossRef]
- Tashima, T.; Kubota, T.; Mega, T.; Ushio, T.; Oki, R. Precipitation extremes monitoring using the near-real-time GSMaP product. Remote Sens. 2020, 13, 5640–5651. [Google Scholar] [CrossRef]
- Zhou, L.; Rasmy, M.; Takeuchi, K.; Koike, T.; Selvarajah, H.; Ao, T. Adequacy of Near-Real-Time Satellite Precipitation Products in Driving Flood Discharge Simulation in the Fuji River Basin, Japan. Appl. Sci. 2021, 11, 1087. [Google Scholar] [CrossRef]
- Zhou, L.; Koike, T.; Takeuchi, K.; Rasmy, M.; Onuma, K.; Ito, H.; Selvarajah, H.; Liu, L.; Li, X.; Ao, T. A Study on Availability of Ground Observations and Its Impacts on Bias Correction of Satellite Precipitation Products and Hydrologic Simulation Efficiency. J. Hydrol. 2022, 310, 127595. [Google Scholar] [CrossRef]
- Cloke, H.L.; Pappenberger, F. Ensemble flood forecasting: A review. J. Hydrol. 2009, 375, 613–626. [Google Scholar] [CrossRef]
- Webster, P.J.; Jian, J.; Hopson, T.M.; Hoyos, C.D.; Agudelo, P.A.; Chang, H.-R.; Curry, J.A.; Grossman, R.L.; Palmer, T.; Subbiah, A.R. Extended-Range Probabilistic Forecasts of Ganges and Brahmaputra Floods in Bangladesh. Bull. Am. Meteorol. Soc. 2010, 91, 1493–1514. [Google Scholar] [CrossRef] [Green Version]
- Cuo, L.; Pagano, T.C.; Wang, Q.J. A review of quantitative precipitation forecasts and their use in short- to medium-range streamflow forecasting. J. Hydrometeorol. 2011, 12, 713–728. [Google Scholar] [CrossRef]
- Ushiyama, T.; Sayama, T.; Tatebe, Y.; Fujioka, S.; Fukami, K. Numerical Simulation of 2010 Pakistan Flood in the Kabul River Basin by Using Lagged Ensemble Rainfall Forecasting. J. Hydrometeorol. 2014, 15, 193–211. Available online: http://www.jstor.org/stable/24914368 (accessed on 12 March 2023). [CrossRef]
- Bowler, N.; Arribas, A.; Mylne, K.; Robertson, K.; Beare, S. The MOGREPS short-range ensemble prediction system. Q. J. R. Meteorol. Soc. 2008, 134, 703–722. [Google Scholar] [CrossRef]
- Molteni, F.R.; Buizza, R.; Palmer, T.N.; Petroliagis, T. The ECMWF Ensemble Prediction System: Methodology and validation. Q. J. R. Meteorol. Soc. 1996, 122, 73–119. [Google Scholar] [CrossRef]
- Toth, Z.; Kalnay, E. Ensemble forecasting at NCEP and the breeding method. Mon. Weather Rev. 1997, 125, 3297–3319. [Google Scholar] [CrossRef]
- Wu, W.; Emerton, R.; Duan, Q.; Wood, A.W.; Wetterhall, F.; Robertson, D.E. Ensemble flood forecasting: Current status and future opportunities. Wiley Interdiscip. Rev. Water 2020, 62, e1432. [Google Scholar] [CrossRef]
- Ho, J.-Y.; Liu, C.-H.; Chen, W.-B.; Chang, C.-H.; Lee, K.T. Using ensemble quantitative precipitation forecast for rainfall-induced shallow landslide predictions. Geosci. Lett. 2022, 9, 22. [Google Scholar] [CrossRef]
- Chessa, P.A.; Lalaurette, F. Verification of the ECMWF Ensemble Prediction System Forecasts: A Study of Large-scale Patterns. Weather. Forecast. 2001, 16, 611–619. [Google Scholar] [CrossRef]
- Vegad, U.; Mishra, V. Ensemble streamflow prediction considering the influence of reservoirs in Narmada River Basin, India. Hydrol. Earth Syst. Sci. 2022, 26, 6361–6378. [Google Scholar] [CrossRef]
- Patel, A.; Yadav, S.M. Stream flow prediction using TIGGE ensemble precipitation forecast data for Sabarmati river basin. Water Supply 2022, 22, 8317–8336. [Google Scholar] [CrossRef]
- Manikanta, V.; Nikhil Teja, K.; Das, J.; Umamahesh, N. On the verification of ensemble precipitation forecasts over the Godavari River basin. J. Hydrol. 2023, 616, 128794. [Google Scholar] [CrossRef]
- Van der Knijff, J.; Younis, J.; de Roo, A. LISFLOOD: A GIS-based distributed model for river basin scale water balance and flood simulation. Int. J. Geogr. Inf. Sci. 2010, 24, 189–212. [Google Scholar] [CrossRef]
- Yamazaki, D.; Sato, T.; Kanae, S.; Hirabayashi, Y.; Bates, P.D. Regional flood dynamics in a bifurcating mega delta simulated in a global river model. Geophys. Res. Lett. 2014, 41, 3127–3135. [Google Scholar] [CrossRef] [Green Version]
- Sayama, T.; Ozawa, G.; Kawakami, T.; Nabesaka, S.; Fukami, K. Rainfall-Runoff-Inundation Analysis of Pakistan Flood 2010 at the Kabul River Basin. Hydrol. Sci. J. 2012, 57, 298–312. [Google Scholar] [CrossRef]
- Rasmy, M.; Sayama, T.; Koike, T. Development of Water and Energy Budget-Based Rainfall-Runoff-Inundation Model (WEB-RRI) and Its Verification in the Kalu and Mundeni River Basins, Sri Lanka. J. Hydrol. 2019, 579, 124163. [Google Scholar] [CrossRef]
- Nandalal, K.D.W. Use of a hydrodynamic model to forecast floods of Kalu River in Sri Lanka. J. Flood Risk Manag. 2009, 2, 151–158. [Google Scholar] [CrossRef]
- Kobayashi, S.; Ota, Y.; Harada, Y.; Ebita, A.; Moriya, M.; Onoda, H.; Onogi, K.; Kamahori, H.; Kobayashi, C.; Endo, H.; et al. The JRA-55 Reanalysis: General specifications and basic characteristics. J. Meteor. Soc. Jpn. 2015, 93, 5–48. [Google Scholar] [CrossRef] [Green Version]
- Kubota, T.; Shige, S.; Hashizume, H.; Aonashi, K.; Takahashi, N.; Seto, S.; Hirose, M.; Takayabu, Y.N.; Ushio, T.; Nakagawa, K.; et al. Global precipitation map using satellite-borne microwave radiometers by the GSMaP project: Production and validation. IEEE Trans. Geosci. Remote Sens. 2007, 45, 2259–2275. [Google Scholar] [CrossRef]
- Aonashi, K.; Awaka, J.; Hirose, M.; Kozu, T.; Kubota, T.; Liu, G.; Shige, S.; Kida, S.; Seto, S.; Takahashi, N.; et al. GSMaP passive, microwave precipitation retrieval algorithm: Algorithm description and validation. J. Meteor. Soc. Jpn. 2009, 87A, 119–13640. [Google Scholar] [CrossRef] [Green Version]
- Joyce, R.J.; Janowiak, J.E.; Arkin, P.A.; Xie, P. CMORPH: A method that produces global precipitation estimates from passive microwave and infrared data at high spatial and temporal resolution. J. Hydrometeorol. 2004, 5, 487–503. [Google Scholar] [CrossRef]
- Ushio, T.; Sasashige, K.; Kubota, T.; Shige, S.; Okamoto, K.; Aonashi, K.; Inoue, T.; Takahashi, N.; Iguchi, T.; Kachi, M.; et al. A Kalman filter approach to the Global Satellite Mapping of Precipitation (GSMaP) from combined passive microwave and infrared radiometric data. J. Meteorol. Soc. Jpn. 2009, 87A, 137–151. [Google Scholar] [CrossRef] [Green Version]
- Chen, S.; Hu, J.; Zhang, A.; Min, C.; Huang, C.; Liang, Z. Performance of near real-time Global Satellite Mapping of Precipitation estimates during heavy precipitation events over northern China. Theor. Appl. Climatol. 2019, 135, 877–891. [Google Scholar] [CrossRef]
- Skamarock, W.C.; Klemp, J.B.; Dudhia, J.; Gill, D.O.; Zhiquan, L.; Berner, J.; Wang, W.; Powers, J.G.; Duda, M.G.; Barker, D.M.; et al. A Description of the Advanced Research WRF Model Version 4; Technical Report NCAR/TN-475+STR for National Center for Atmospheric Research: Boulder, CO, USA, 2019. [Google Scholar] [CrossRef]
- Zhou, X.; Zhu, Y.; Hou, D.; Luo, Y.; Peng, J.; Wobus, R. Performance of the New NCEP Global Ensemble Forecast System in a Parallel Experiment. Weather Forecast. 2017, 32, 1989–2004. [Google Scholar] [CrossRef]
- Marsigli, C.; Boccanera, F.; Montani, A.; Paccagnella, T. The COSMO-LEPS mesoscale ensemble system: Validation of the methodology and verification. Nonlin. Process. Geophys. 2005, 12, 527–536. [Google Scholar] [CrossRef] [Green Version]
- Lehner, B.; Verdin, K.; Jarvis, A. New global hydrography derived from spaceborne elevation data. Eos Trans. Am. Geophys. Union 2008, 89, 2. [Google Scholar] [CrossRef]
- Sellers, P.J.; Tucker, C.J.; Collatz, G.J.; Los, S.; Justice, C.O.; Dazlich, D.A.; Randall, D. A revised land surface parameterization (SiB2) for atmospheric GCMs, Part I: Model formulation. J. Clim. 1996, 9, 676–705. [Google Scholar] [CrossRef]
- Sellers, P.J.; Tucker, C.J.; Collatz, G.J.; Los, S.; Justice, C.O.; Dazlich, D.A.; Randall, D. A revised land surface parameterization (SiB2) for atmospheric GCMs, Part II: The generation of global fields of terrestrial biophysical parameters from satellite data. J. Clim. 1996, 9, 706–737. [Google Scholar] [CrossRef]
- Wang, L.; Koike, T.; Yang, K.; Jackson, T.J.; Bindlish, R.; Yang, D. Development of a distributed biosphere hydrological model and its evaluation with the Southern Great Plains Experiments (SGP97 and SGP99). J. Geophys. Res. 2009, 114, D08107. [Google Scholar] [CrossRef] [Green Version]
- Brier, G.W. Verification of forecasts expressed in terms of probability. Mon. Weather Rev. 1950, 78, 1–3. [Google Scholar] [CrossRef]
- Bates, P.; De Roo, A. A simple raster-based model for flood inundation simulation. J. Hydrol. 2000, 236, 54–77. [Google Scholar] [CrossRef]
- Liu, Z.; Merwade, V.; Jafarzadegan, K. Investigating the role of model structure and surface roughness in generating flood inundation extents using one- and two-dimensional hydraulic models. J. Flood Risk Manag. 2019, 12, e12347. [Google Scholar] [CrossRef] [Green Version]
- Braun, S. Aerosol, Cloud, Convection, and Precipitation (ACCP) Science & Applications. March 2022. Available online: https://aos.gsfc.nasa.gov/docs/ACCP_Science_Narrative-(Mar2022).pdf (accessed on 22 July 2022).
- Yoshimoto, S.; Amarnath, G. Applications of Satellite-Based Rainfall Estimates in Flood Inundation Modeling—A Case Study in Mundeni Aru River Basin, Sri Lanka. Remote Sens. 2017, 9, 998. [Google Scholar] [CrossRef] [Green Version]
- Tam, T.H.; Abd Rahman, M.Z.; Harun, S.; Hanapi, M.N.; Kaoje, I.U. Application of Satellite Rainfall Products for Flood Inundation Modelling in Kelantan River Basin, Malaysia. Hydrology 2019, 6, 95. [Google Scholar] [CrossRef] [Green Version]
- Ushiyama, T.; Sayama, T.; Iwami, Y. Ensemble Flood Forecasting of Typhoons Talas and Roke at Hiyoshi Dam Basin. J. Disaster Res. 2016, 11, 1032–1039. [Google Scholar] [CrossRef]
- Magnusson, L.; Källén, E. Factors influencing skill improvements in the ECMWF forecasting system. Mon. Weather Rev. 2013, 141, 3142–3153. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Station Name | Latitude (N) | Longitude (E) |
|---|---|---|---|
| 1 | Kahawatta | 6.6 | 80.58 |
| 2 | Kalawana | 6.54 | 80.38 |
| 3 | Ratnapura | 6.72 | 80.38 |
| 4 | Dodampe | 6.73 | 80.32 |
| 5 | Kalutara | 6.6 | 79.95 |
| 6 | Putupaula (discharge only) | 6.6 | 79.95 |
| No. | Flood Event | Event Period |
|---|---|---|
| 1 | Historical (major) flood | 25 May 2017~2 June 2017 |
| 2 | Minor flood | 20 May 2018~28 May 2028 |
| 3 | False alarm | 24 May 2018 |
| Event | Errors (Units) | Discharge Derived from GSMaP Products | |||
|---|---|---|---|---|---|
| NRT | NRT-IF | NOW | NOW-IF | ||
| Nash–Sutcliffe Efficiency (-) | 0.98 | 0.99 | 0.77 | 0.97 | |
| May 2017 | RMSE (m3/s) | 80.90 | 80.02 | 357.42 | 118.51 |
| MBE (m3/s) | −16.34 | 34.91 | −226.88 | −54.79 | |
| Nash–Sutcliffe Efficiency (-) | 0.50 | 0.93 | 0.26 | 0.87 | |
| May 2018 | RMSE (m3/s) | 300.34 | 109.57 | 363.79 | 150.24 |
| MBE (m3/s) | −200.40 | 12.71 | −245.47 | −52.65 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rasmy, M.; Yasukawa, M.; Ushiyama, T.; Tamakawa, K.; Aida, K.; Seenipellage, S.; Hemakanth, S.; Kitsuregawa, M.; Koike, T. Investigations of Multi-Platform Data for Developing an Integrated Flood Information System in the Kalu River Basin, Sri Lanka. Water 2023, 15, 1199. https://doi.org/10.3390/w15061199
Rasmy M, Yasukawa M, Ushiyama T, Tamakawa K, Aida K, Seenipellage S, Hemakanth S, Kitsuregawa M, Koike T. Investigations of Multi-Platform Data for Developing an Integrated Flood Information System in the Kalu River Basin, Sri Lanka. Water. 2023; 15(6):1199. https://doi.org/10.3390/w15061199
Chicago/Turabian StyleRasmy, Mohamed, Masaki Yasukawa, Tomoki Ushiyama, Katsunori Tamakawa, Kentaro Aida, Sugeeshwara Seenipellage, Selvarajah Hemakanth, Masaru Kitsuregawa, and Toshio Koike. 2023. "Investigations of Multi-Platform Data for Developing an Integrated Flood Information System in the Kalu River Basin, Sri Lanka" Water 15, no. 6: 1199. https://doi.org/10.3390/w15061199