
Acid Mine Drainage Discrimination Using Very High Resolution Imagery Obtained by Unmanned Aerial Vehicle in a Stone Coal Mining Area
Abstract
:1. Introduction
2. Materials and Methods
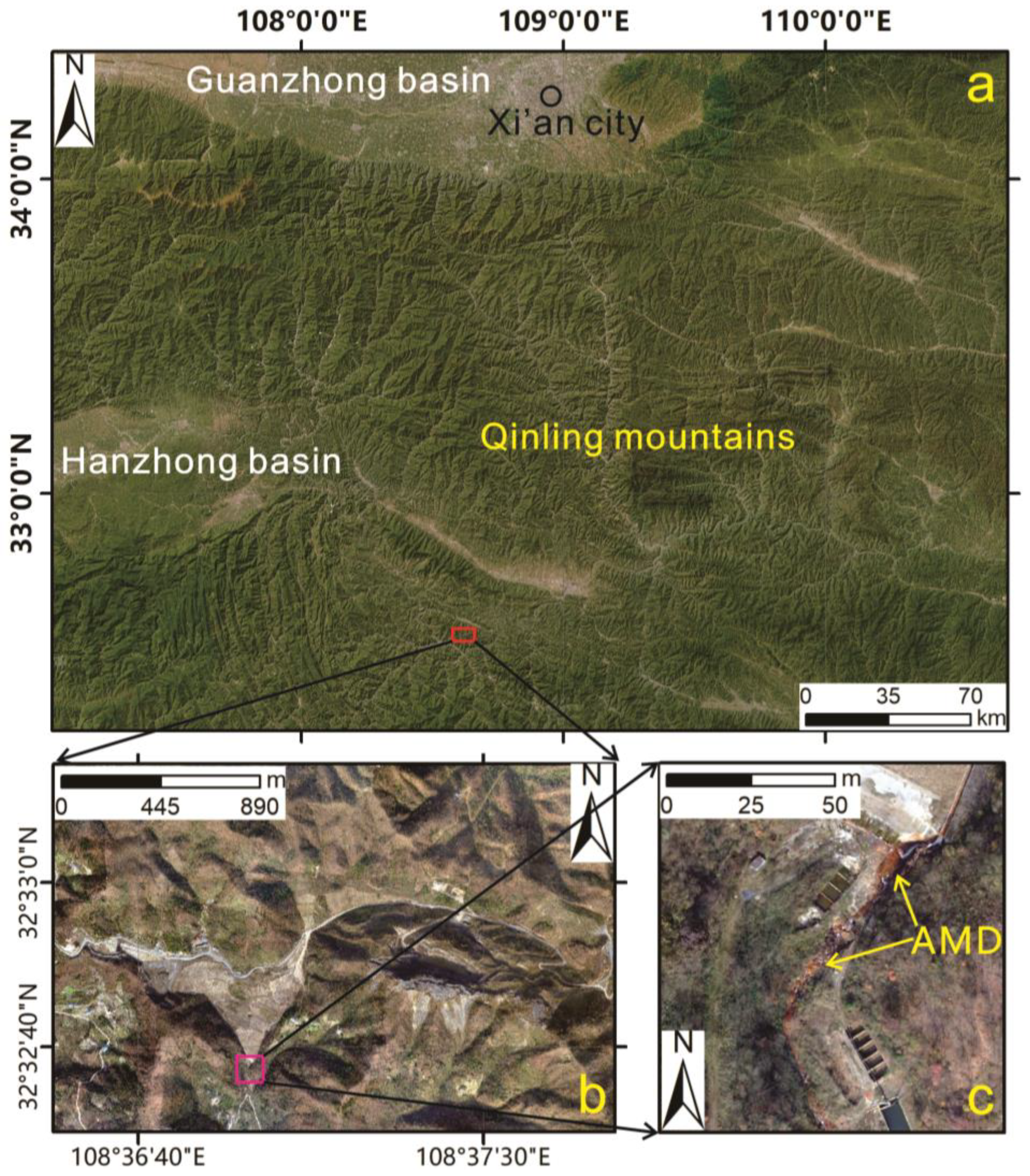
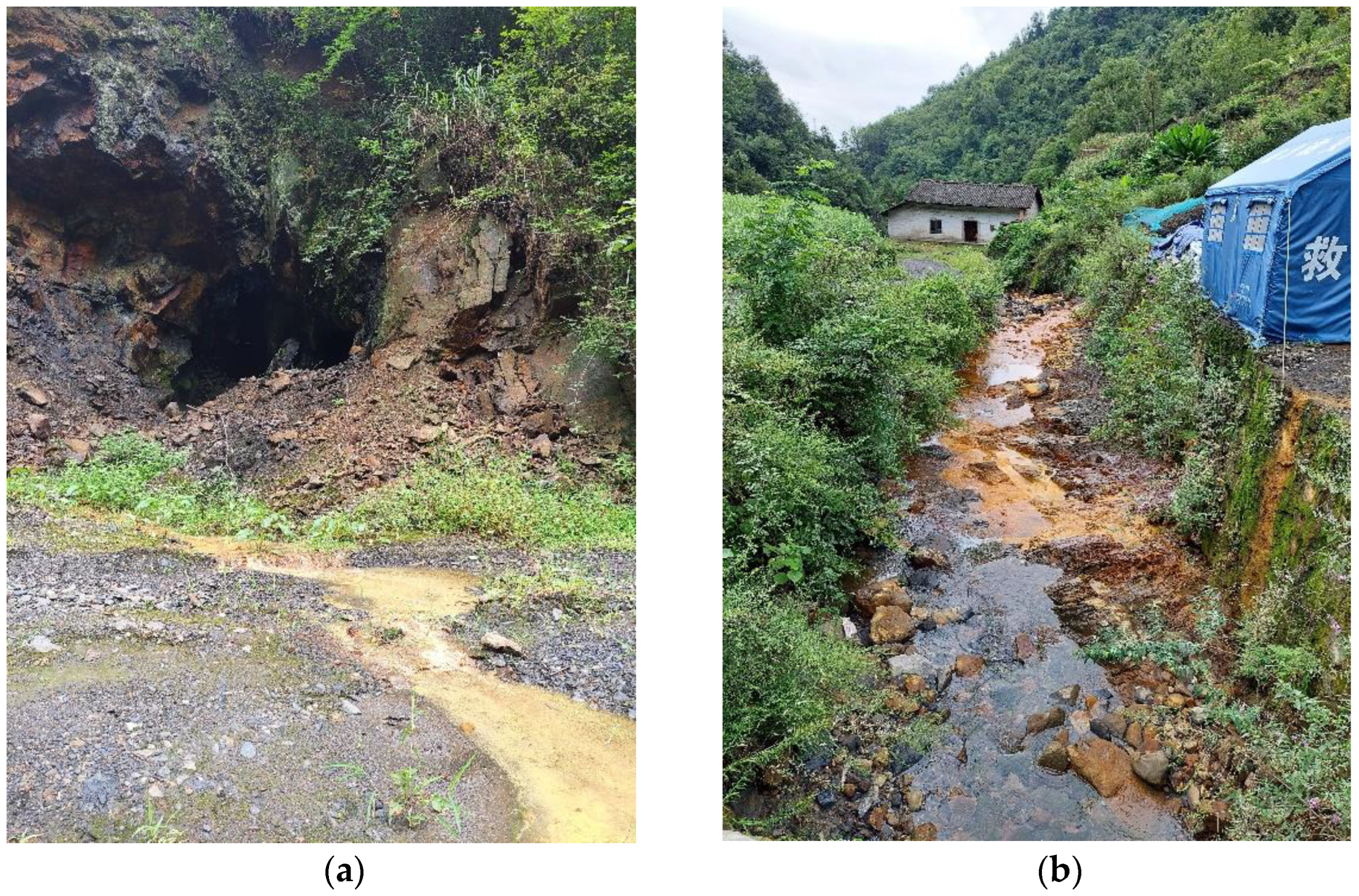
2.1. Study Area
2.2. The UAV Aerial Photography System
2.3. Pre-Processing
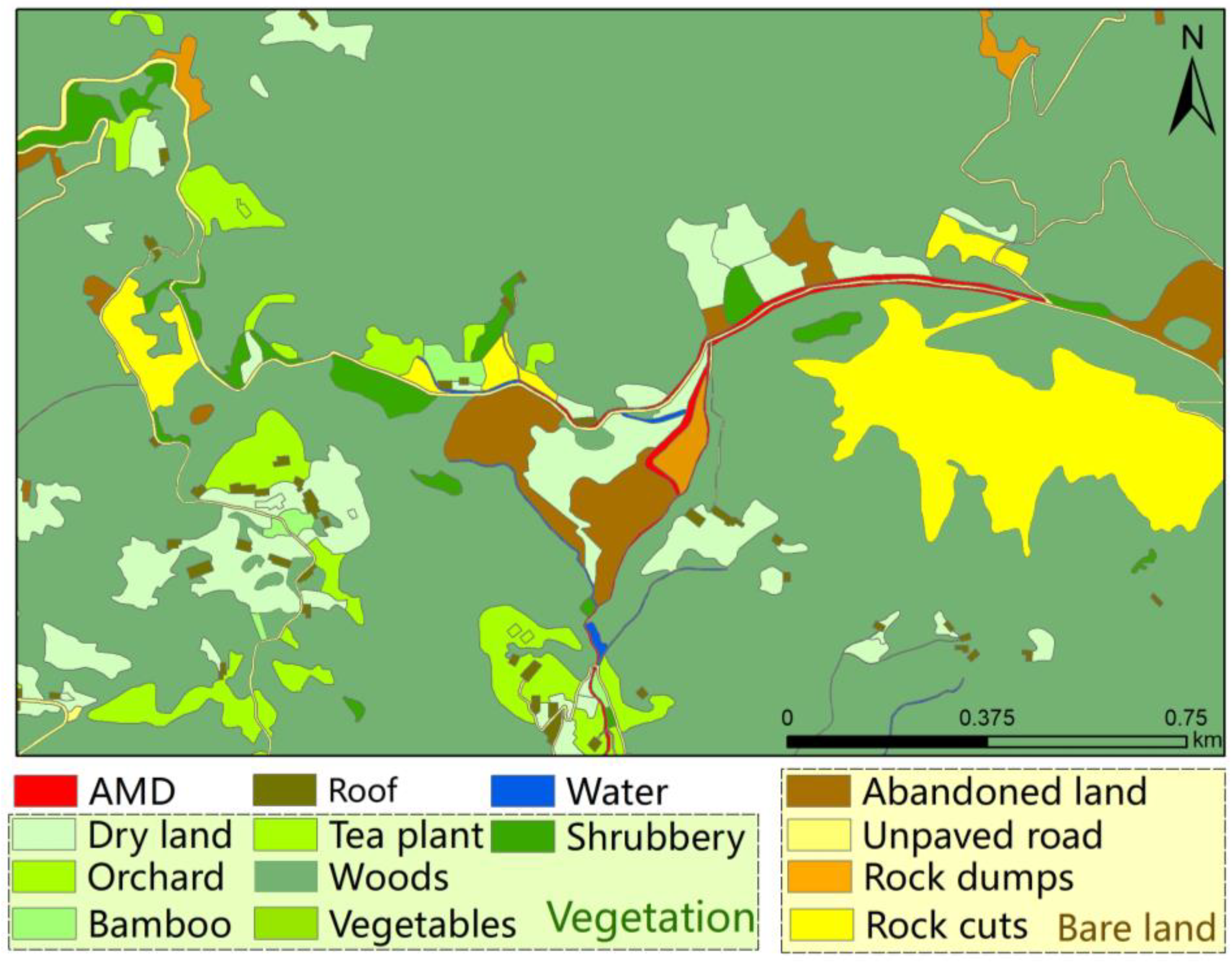
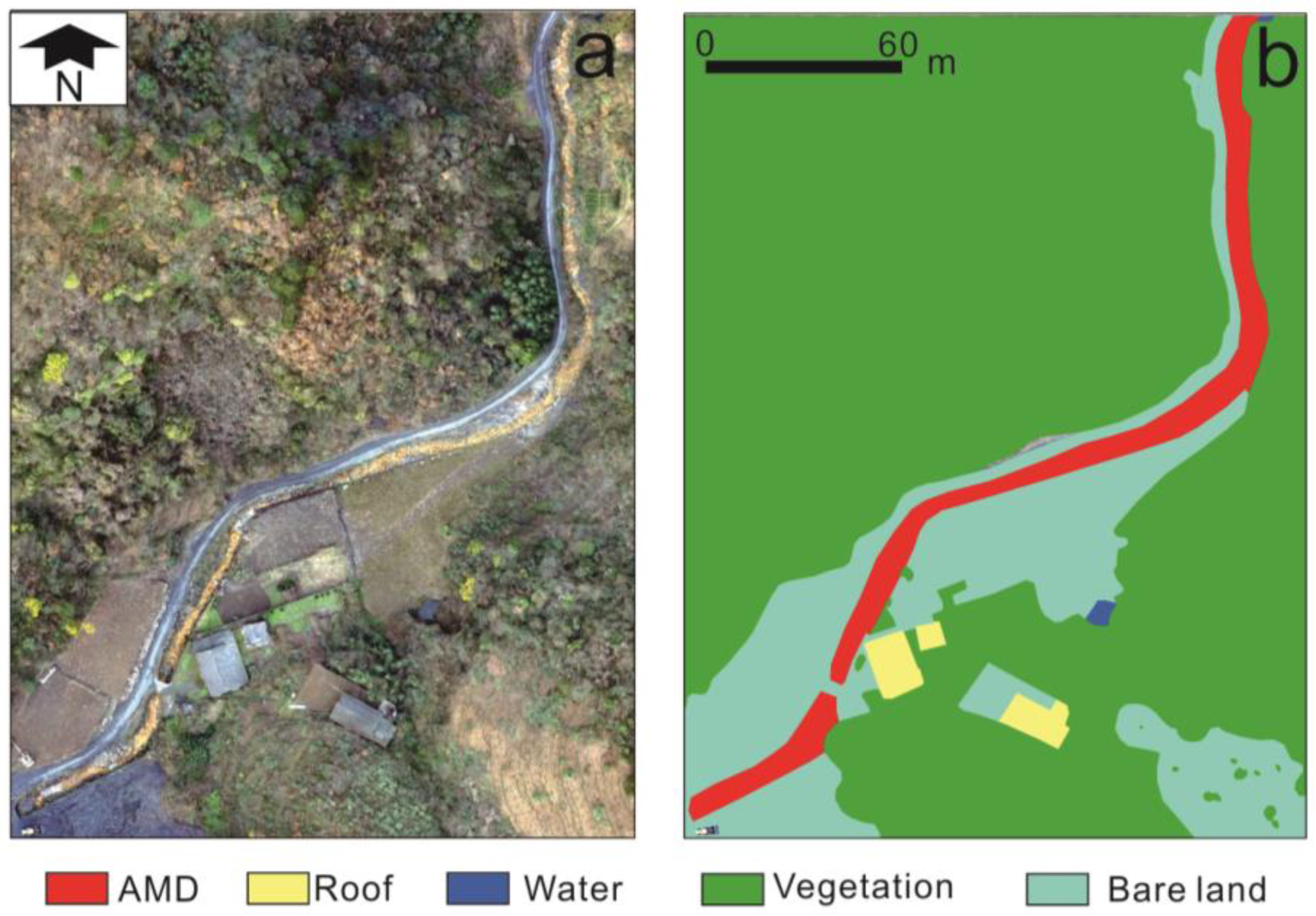
2.4. Ground Truth Data
2.5. Methods
2.5.1. Selection of Study Samples
2.5.2. Support Vector Machine
2.5.3. Random Forest
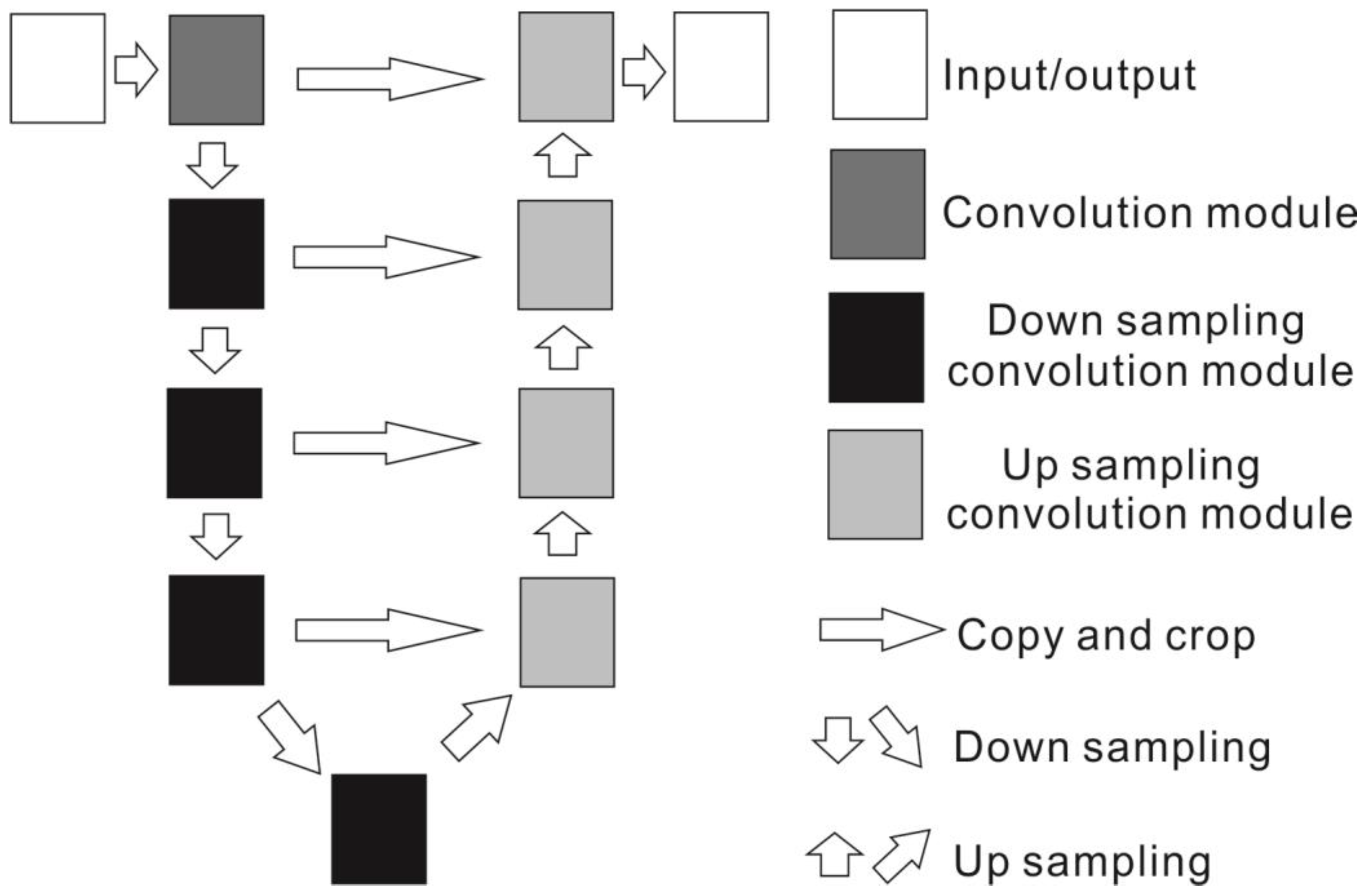
2.5.4. U-Net
2.5.5. Confusion Matrix
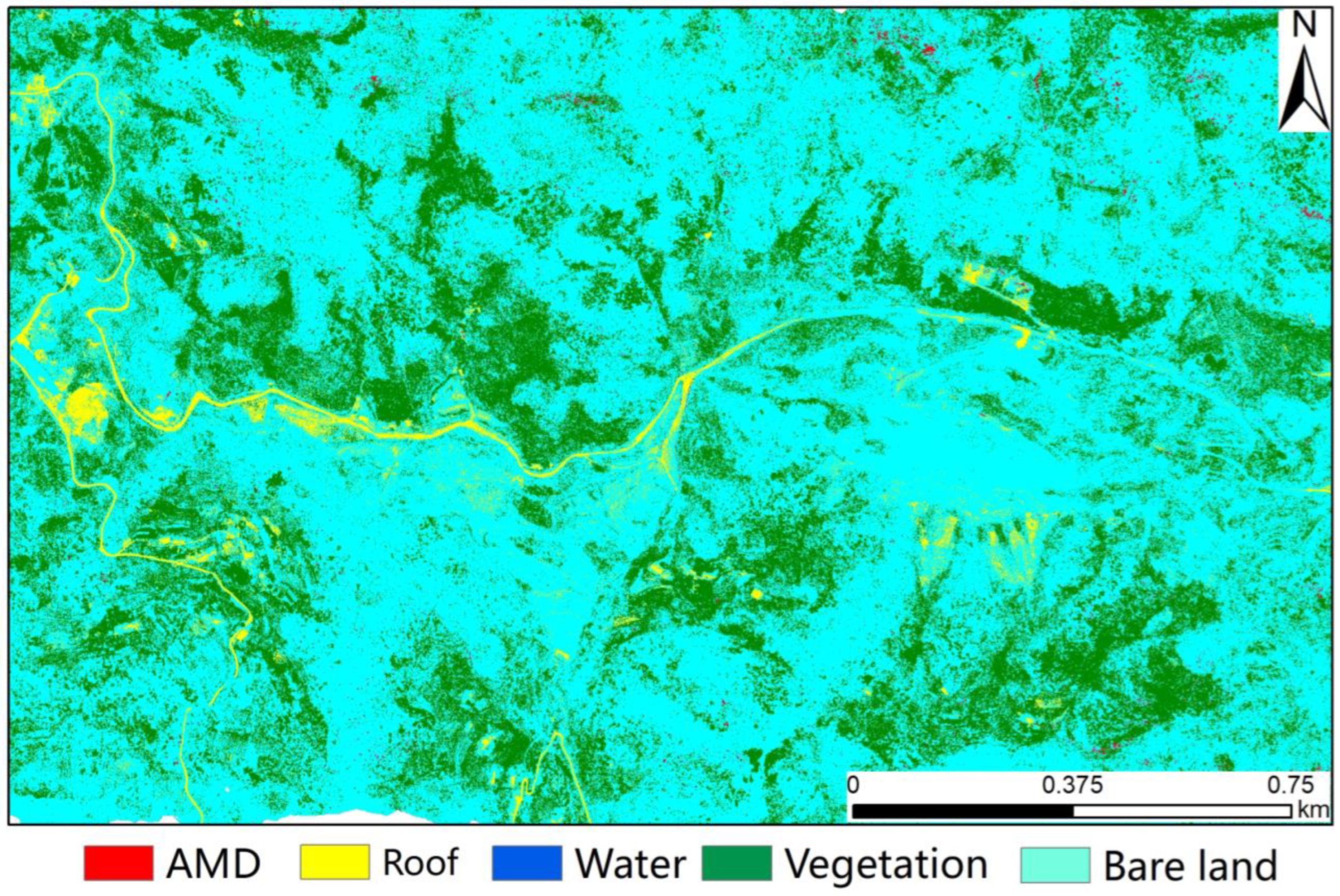
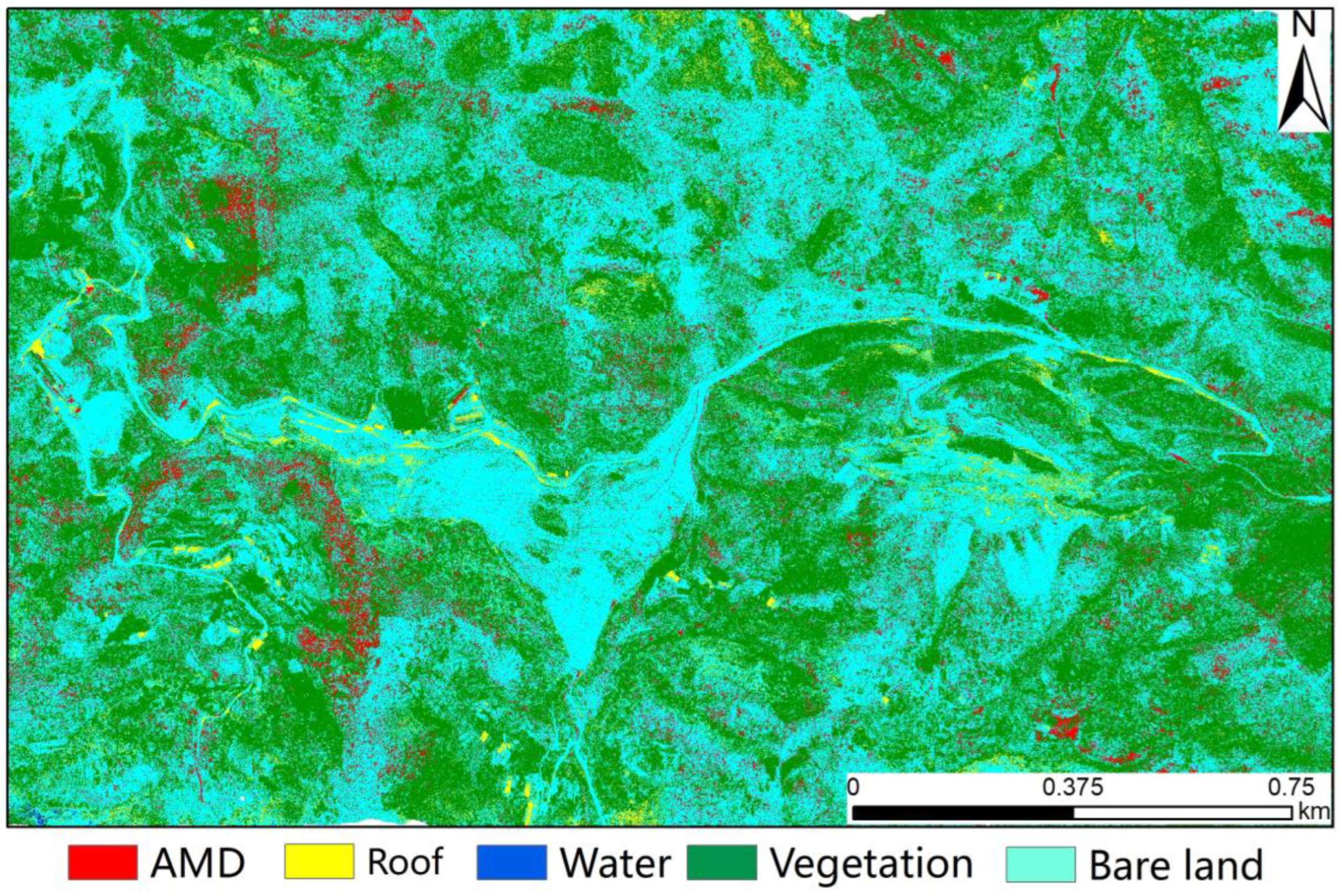
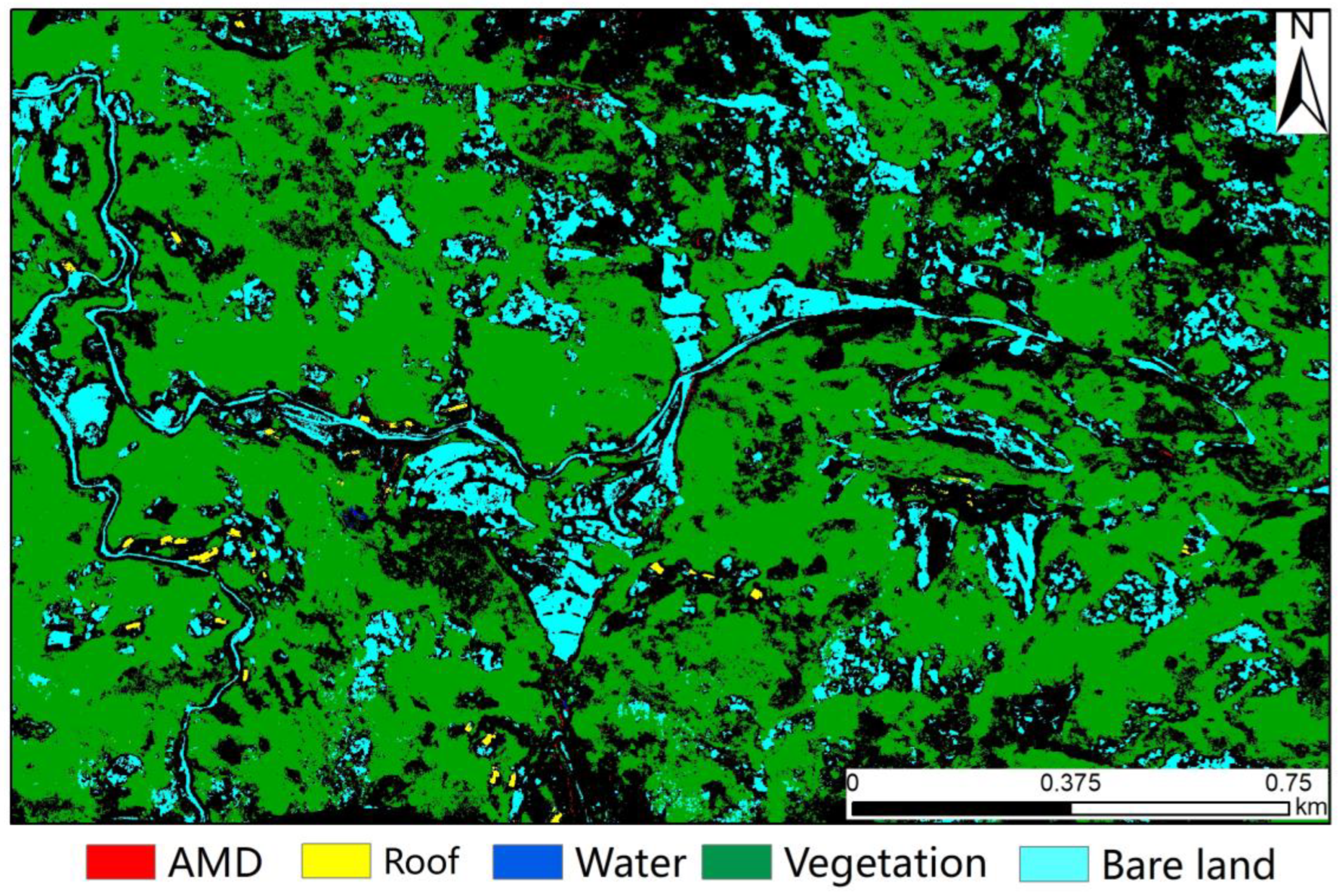
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Lottermoser, B. Mine Wastes; Springer: Berlin/Heidelberg, Germany, 2010; Volume 44, p. 085201. [Google Scholar]
- Liu, Q.; Chen, B.; Haderlein, S.; Gopalakrishnan, G.; Zhou, Y. Characteristics and environmental response of secondary minerals in AMD from Dabaoshan Mine, South China. Ecotoxicol. Environ. Saf. 2018, 155, 50–58. [Google Scholar] [CrossRef] [PubMed]
- Ferrier, G. Application of imaging spectrometer data in identifying environmental pollution caused by mining at Rodaquilar, Spain. Remote Sens. Environ. 1999, 68, 125–137. [Google Scholar] [CrossRef]
- Kemper, T.; Sommer, S. Estimate of heavy metal contamination in soils after a mining accident using reflectance spectroscopy. Environ. Sci. Technol. 2002, 36, 2742–2747. [Google Scholar] [CrossRef] [PubMed]
- Zvereva, V.P.; Frolov, K.R.; Lysenko, A.I. Formation of mine drainage in the Far Eastern region and its impact on the ecosphere and public health. Min. Sci. Technol. 2022, 7, 203–215. [Google Scholar] [CrossRef]
- Arefieva, O.; Nazarkina, A.V.; Gruschakova, N.V.; Skurikhina, J.E.; Kolycheva, V.B. Impact of mine waters on chemical composition of soil in the Partizansk Coal Basin, Russia. Int. Soil Water Conserv. Res. 2019, 7, 57–63. [Google Scholar] [CrossRef]
- Lazareva, E.; Myagkaya, I.; Kirichenko, I.; Gustaytis, M.; Zhmodik, S. Interaction of natural organic matter with acid mine drainage: In-situ accumulation of elements. Sci. Total Environ. 2019, 660, 468–483. [Google Scholar] [CrossRef]
- Banfield, J.F.; Welch, S.A. Microbial controls on the mineralogy of the environment. In Environmental Mineralogy; Vaughan, D.J., Wogelius, R.A., Eds.; Mineralogical Society of Great Britain and Ireland: London, UK, 2000; Volume 2, ISBN 978-963-463-133-0. [Google Scholar]
- Singer, P.C.; Stumm, W. Kinetics of the oxidation of ferrous iron. In Proceedings of the Second Symposium on Coal Mine Draiage Research, National Coal Association/Bituminous Coal Research, Pittsburgh, PA, USA, 14–15 May 1968; Wiley: New York, NY, USA, 1968; pp. 12–34. [Google Scholar]
- Bowles, J.F.W. Hydroxides. In Encyclopedia of Geology, 2nd ed.; Alderton, D., Elias, S.A., Eds.; Academic Press: Oxford, UK, 2021; pp. 442–451. ISBN 978-0-08-102909-1. [Google Scholar]
- Schwertmann, U. Effect of pH on the formation of goethite and hematite from ferrihy-drite. Clays Clay Miner. 1983, 31, 277–284. [Google Scholar] [CrossRef]
- Das, S.; Hendry, M.J.; Essilfie-Dughan, J. Transformation of two-line ferrihydrite to goethite and hematite as a function of pH and temperature. Environ. Sci. Technol. 2011, 45, 268–275. [Google Scholar] [CrossRef]
- Desborough, G.A.; Smith, K.S.; Lowers, H.A.; Swayze, G.A.; Hammarstrom, J.M.; Diehl, S.F.; Leinz, R.W.; Driscoll, R.L. Min-eralogical and chemical characteristics of some natural jarosites. Geochim. Cosmochim. Acta 2010, 74, 1041–1056. [Google Scholar] [CrossRef] [Green Version]
- Fraser, S. Discrimination and identification of ferric oxides using satellite thematic mapper data: A Newman case study. Int. J. Remote Sens. 1991, 12, 614–635. [Google Scholar] [CrossRef]
- Gopinathan, P.; Parthiban, S.; Magendran, T.; Al-Quraishi, A.M.F.; Singh, A.K.; Singh, P.K. Mapping of ferric (Fe3+) and ferrous (Fe2+) iron oxides distribution using band ratio techniques with aster data and geochemistry of Kanjamalai and Godumalai, Tamil Nadu, South India. Remote Sens. Appl. Soc. Environ. 2020, 18, 100306. [Google Scholar]
- Jackisch, R.; Lorenz, S.; Zimmermann, R.; Möckel, R.; Gloaguen, R. Drone-borne hyperspectral monitoring of acid mine drainage: An example from the Sokolov Lignite District. Remote Sens. 2018, 10, 385. [Google Scholar] [CrossRef] [Green Version]
- Mielke, C.; Boesche, N.K.; Rogass, C.; Kaufmann, H.; Gauert, C.; De Wit, M. Spaceborne mine waste mineralogy monitoring in South Africa, applications for modern push-broom missions: Hyperion/OLI and EnMAP/Sentinel-2. Remote Sens. 2014, 6, 6790–6816. [Google Scholar] [CrossRef] [Green Version]
- Chalkley, R.; Crane, R.A.; Eyre, M.; Hicks, K.; Jackson, K.-M.; Hudson-Edwards, K.A. A multi-scale feasibility study into acid mine drainage (AMD) monitoring using same-day observations. Remote Sens. 2023, 15, 76. [Google Scholar] [CrossRef]
- Bacova, D.; Khairutdinov, A.M.; Gago, F. Cosmic geodesy contribution to geodynamics monitoring. IOP Conf. Ser. Earth Environ. Sci. 2021, 906, 12074. [Google Scholar] [CrossRef]
- Golik, V.I.; Klyuev, R.V.; Martyushev, N.V.; Brigida, V.; Efremenkov, E.A.; Sorokova, S.N.; Mengxu, Q. Tailings utilization and zinc extraction based on mechanochemical activation. Materials 2023, 16, 726. [Google Scholar] [CrossRef]
- Swayze, G.A.; Smith, K.S.; Clark, R.N.; Sutley, S.J.; Pearson, R.M.; Vance, J.S.; Hageman, P.L.; Briggs, P.H.; Meier, A.L.; Singleton, M.J.; et al. Using imaging spectroscopy to map acidic mine waste. Environ. Sci. Technol. 2000, 34, 47–54. [Google Scholar] [CrossRef]
- Isgró, M.A.; Basallote, M.D.; Caballero, I.; Barbero, L. Comparison of UAS and sentinel-2 multispectral imagery for water quality monitoring: A case study for acid mine drainage affected areas (SW Spain). Remote Sens. 2022, 14, 4053. [Google Scholar] [CrossRef]
- Montero, I.C.; Brimhall, G.H.; Alpers, C.N.; Swayze, G.A. Characterization of waste rock associated with acid drainage at the Penn Mine, California, by ground-based visible to short-wave infrared reflectance spectroscopy assisted by digital map-ping. Chem. Geol. 2005, 215, 453–472. [Google Scholar] [CrossRef] [Green Version]
- Flores, H.; Lorenz, S.; Jackisch, R.; Tusa, L.; Contreras, I.C.; Zimmermann, R.; Gloaguen, R. UAS-based hyperspectral environmental monitoring of acid mine drainage affected waters. Minerals 2021, 11, 182. [Google Scholar] [CrossRef]
- Richter, N.; Staenz, K.; Kaufmann, H. Spectral unmixing of airborne hyperspectral data for baseline mapping of mine tailings areas. Int. J. Remote Sens. 2008, 29, 3937–3956. [Google Scholar] [CrossRef]
- Choe, E.; van der Meer, F.; van Ruitenbeek, F.; van der Werff, H.; de Smeth, B.; Kim, K.W. Mapping of heavy metal pollution in stream sediments using combined geo-chemistry, field spectroscopy, and hyperspectral remote sensing: A case study of the Rodalquilar mining area, SE Spain. Remote Sens. Environ. 2008, 112, 3222–3233. [Google Scholar] [CrossRef]
- Shang, J.; Morris, B.; Howarth, P.; Lévesque, J.; Staenz, K.; Neville, B. Mapping mine tailing surface mineralogy using hyperspectral remote sensing. Can. J. Remote Sens. 2009, 35, S126–S141. [Google Scholar] [CrossRef]
- Davies, G.E.; Calvin, W.M. Mapping acidic mine waste with seasonal airborne hyper-spectral imagery at varying spatial scales. Environ. Earth Sci. 2017, 76, 1–14. [Google Scholar] [CrossRef]
- Sares, M.; Hauff, P.; Peters, D.; Coulter, D. Characterizing sources of acid rock drain-age and resulting water quality impacts using hyperspectral remote sensing—Examples from the Upper Arkansas. In Proceedings of the Advanced Integration of Geospatial Technologies in Mining Reclamation, Atlanta, GA, USA, 7–9 December 2004. [Google Scholar]
- Crowley, J.; Williams, D.; Hammarstrom, J.; Piatak, N.; Chou, I.-M.; Mars, J. Spectral reflectance properties (0.4–2.5 μm) of secondary Fe-oxide, Fe-hydroxide, and Fe-sulphate-hydrate minerals associated with sulphide-bearing mine wastes. Geochem. Explor. Environ. Anal. 2003, 3, 219–228. [Google Scholar] [CrossRef]
- Davies, G.E.; Calvin, W.M. Quantifying iron concentration in local and synthetic acid mine drainage: A new technique using handheld field spectrometers. Mine Water Environ. 2016, 36, 299–309. [Google Scholar] [CrossRef]
- Booysen, R.; Gloaguen, R.; Lorenz, S.; Zimmermann, R.; Nex, P.A. Geological remote sensing. In Reference Module in Earth Systems and Environmental Sciences, 2nd ed.; Elsevier: Amsterdam, The Netherlands, 2020; Volume 64, pp. 267–274. [Google Scholar]
- Jia, Z.; Lv, T. Geological characteristics and stone-bearing coal analysis of dove formation in Shuanglong Area, Ankang City. Coal 2014, 23, 52–53. [Google Scholar]
- Liu, X.; Lian, X.; Yang, W.; Wang, F.; Han, Y.; Zhang, Y. Accuracy assessment of a UAV direct georeferencing method and impact of the configuration of ground control points. Drones 2022, 6, 30. [Google Scholar] [CrossRef]
- He, K.; Liu, B.; Hu, X.; Zhou, R.; Xi, C.; Ma, G.; Han, M.; Li, Y.; Luo, G. Rapid characterization of landslide-debris flow chains of geologic hazards using multi-method investigation: Case study of the Tiejiangwan LDC. Rock Mech. Rock Eng. 2022, 55, 5183–5208. [Google Scholar] [CrossRef]
- Liu, X.; Zhu, W.; Lian, X.; Xu, X. Monitoring mining surface subsidence with multi-temporal three-dimensional unmanned aerial vehicle point cloud. Remote Sens. 2023, 15, 374. [Google Scholar] [CrossRef]
- Zhao, Z. Researching on 3D modeling of small object with tilt photogrammetry and Context Capture. Digit. Technol. Appl. 2020, 38, 29–31. [Google Scholar]
- Mazzoni, D.; Garay, M.J.; Davies, R.; Nelson, D. An operational MISR pixel classifier using support vector machines. Remote Sens. Environ. 2007, 107, 149–158. [Google Scholar] [CrossRef]
- Zhang, R.; Ma, J. State of the art on remotely sensed data classification based on support vector machines. Adv. Earth Sci. 2009, 24, 555–562. [Google Scholar]
- Long, Y.; Qiao, W.; Sun, J. Change detection of remote sensing images in Datun Mining Area based on support vector machine. Geomat. Spat. Inf. Technol. 2020, 43, 107–115. [Google Scholar]
- Breiman, L. Random forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef] [Green Version]
- Zhang, J.; Yao, Y.; Cao, N. Prediction of whether precipitation based on decision tree. J. Geomat. 2017, 42, 107–109. [Google Scholar]
- Ronneberger, O.; Fischer, P.; Brox, T. U-net: Convolutional networks for biomedical image segmentation. Medical image computing and computer-assisted intervention–MICCAI 2015. In Proceedings of the 18th International Conference, Munich, Germany, 5–9 October 2015; Proceedings, Part III 18. Springer International Publishing: Berlin/Heidelberg, Germany, 2015; pp. 234–241. [Google Scholar]
- Ye, R.; Niu, R.; Zhang, L.; Yi, S. Mineral contents determination and accuracy evaluation based on classification of petrographic images. J. China Univ. Min. Technol. 2011, 40, 810–822. [Google Scholar]
- Fang, X.; Wang, G.; Yang, H.; Liu, H.; Yan, L. High resolution remote sensing image classification combining with mean-shift segmentation and fully convolution neural network. Laser Optoelectron. Prog. 2018, 55, 22802. [Google Scholar] [CrossRef]
- Cao, Q.; Zhong, Y.; Ma, A.; Zhang, L. Urban land use/land cover classification based on feature fusion fusing hyperspectral image and LiDAR data. In Proceedings of the IGARSS 2018—2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018; IEEE: Piscataway Township, NJ, USA, 2018; pp. 8869–8872. [Google Scholar]
- Xia, M.; Cao, G.; Wang, G.; Shang, Y. Remote sensing image classification based on deep learning and conditional random fields. J. Image Graph. 2017, 22, 1289–1301. [Google Scholar]
- Pang, B.; Huang, Z.; Wu, Y.; Lu, Y. Mapping of impervious surface extraction of high resolution remote sensing imagery based on improved fully convolutional neural network. Remote Sens. Inf. 2020, 35, 47–55. [Google Scholar]
- Ma, L.; Fu, T.; Blaschke, T.; Li, M.; Tiede, D.; Zhou, Z.; Ma, X.; Chen, D. Evaluation of feature selection methods for object-based land cover mapping of unmanned aerial vehicle imagery using random forest and support vector machine classifiers. ISPRS Int. J. Geo-Inf. 2017, 6, 51. [Google Scholar] [CrossRef] [Green Version]
- Chen, H.; Bian, Z.; Zhao, X. Research on attribute morphological profiles based on multifeature ultra-high resolution remote sensing image classification. Geomat. Spat. Inf. Technol. 2019, 42, 115–119. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Flight altitude (above take-off) | 946 m |
| Ground resolution | 4 cm |
| Number of flights | 2 |
| Flight duration | 50 min |
| Course overlap | 80% |
| Lateral overlap | 60% |
| Relative height | 314 m |
| Area covered | 3.3 km2 |
| Parameter | Feima D2000 | DJI Matrice 210 V2 [19] | Texo DSI [15] | Tholeg THO-R-PX8 [21] |
|---|---|---|---|---|
| Duration | 60 min | 24 min | 30 min | 20 min |
| Sensor weigh | 200 g | 508.8 g | 680 g | 720 g |
| Cruise speed | 72 km/h | 61 km/h | 36 km/h | 40 km/h |
| Maximum relative height | ±1000 m | ±500 m | ±500 m | ±500 m |
| Class | Bare Land | Vegetation | AMD | Roof | Water |
|---|---|---|---|---|---|
| Unclassified | 0.01 | 0.01 | 0.00 | 0.00 | 0.00 |
| Bare land | 70.85 | 71.87 | 75.47 | 50.63 | 79.57 |
| Vegetation | 8.91 | 27.33 | 2.34 | 0.37 | 19.01 |
| AMD | 0.15 | 0.55 | 13.60 | 0.18 | 0.00 |
| Roof | 20.08 | 0.25 | 8.59 | 48.82 | 1.43 |
| Water | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 |
| Total | 100.00 | 100.00 | 100.00 | 100.00 | 100.00 |
| Class | Bare Land | Vegetation | AMD | Roof | Water |
|---|---|---|---|---|---|
| Unclassified | 0.01 | 0.01 | 0.00 | 0.00 | 0.00 |
| Bare land | 77.43 | 42.80 | 47.49 | 37.61 | 48.49 |
| Vegetation | 12.18 | 47.85 | 12.76 | 7.36 | 34.93 |
| AMD | 4.31 | 7.15 | 38.65 | 12.47 | 2.85 |
| Roof | 6.06 | 2.16 | 1.09 | 42.53 | 13.30 |
| Water | 0.01 | 0.03 | 0.00 | 0.04 | 0.42 |
| Total | 100.00 | 100.00 | 100.00 | 100.00 | 100.00 |
| Class | Bare Land | Vegetation | AMD | Roof | Water |
|---|---|---|---|---|---|
| Unclassified | 43.44 | 37.91 | 26.28 | 37.33 | 47.49 |
| Bare land | 49.80 | 4.56 | 1.76 | 16.75 | 1.62 |
| Vegetation | 6.58 | 57.50 | 2.97 | 1.51 | 2.46 |
| AMD | 0.00 | 0.00 | 68.97 | 0.00 | 5.91 |
| Roof | 0.18 | 0.02 | 0.01 | 44.35 | 0.00 |
| Water | 0.00 | 0.01 | 0.00 | 0.05 | 42.51 |
| Total | 100.00 | 100.00 | 100.00 | 100.00 | 100.00 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kou, X.; Han, D.; Cao, Y.; Shang, H.; Li, H.; Zhang, X.; Yang, M. Acid Mine Drainage Discrimination Using Very High Resolution Imagery Obtained by Unmanned Aerial Vehicle in a Stone Coal Mining Area. Water 2023, 15, 1613. https://doi.org/10.3390/w15081613
Kou X, Han D, Cao Y, Shang H, Li H, Zhang X, Yang M. Acid Mine Drainage Discrimination Using Very High Resolution Imagery Obtained by Unmanned Aerial Vehicle in a Stone Coal Mining Area. Water. 2023; 15(8):1613. https://doi.org/10.3390/w15081613
Chicago/Turabian StyleKou, Xiaomei, Dianchao Han, Yongxiang Cao, Haixing Shang, Houfeng Li, Xin Zhang, and Min Yang. 2023. "Acid Mine Drainage Discrimination Using Very High Resolution Imagery Obtained by Unmanned Aerial Vehicle in a Stone Coal Mining Area" Water 15, no. 8: 1613. https://doi.org/10.3390/w15081613