
Flooding in the Digital Twin Earth: The Case Study of the Enza River Levee Breach in December 2017
 , , , ,
, , , ,  and
and 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
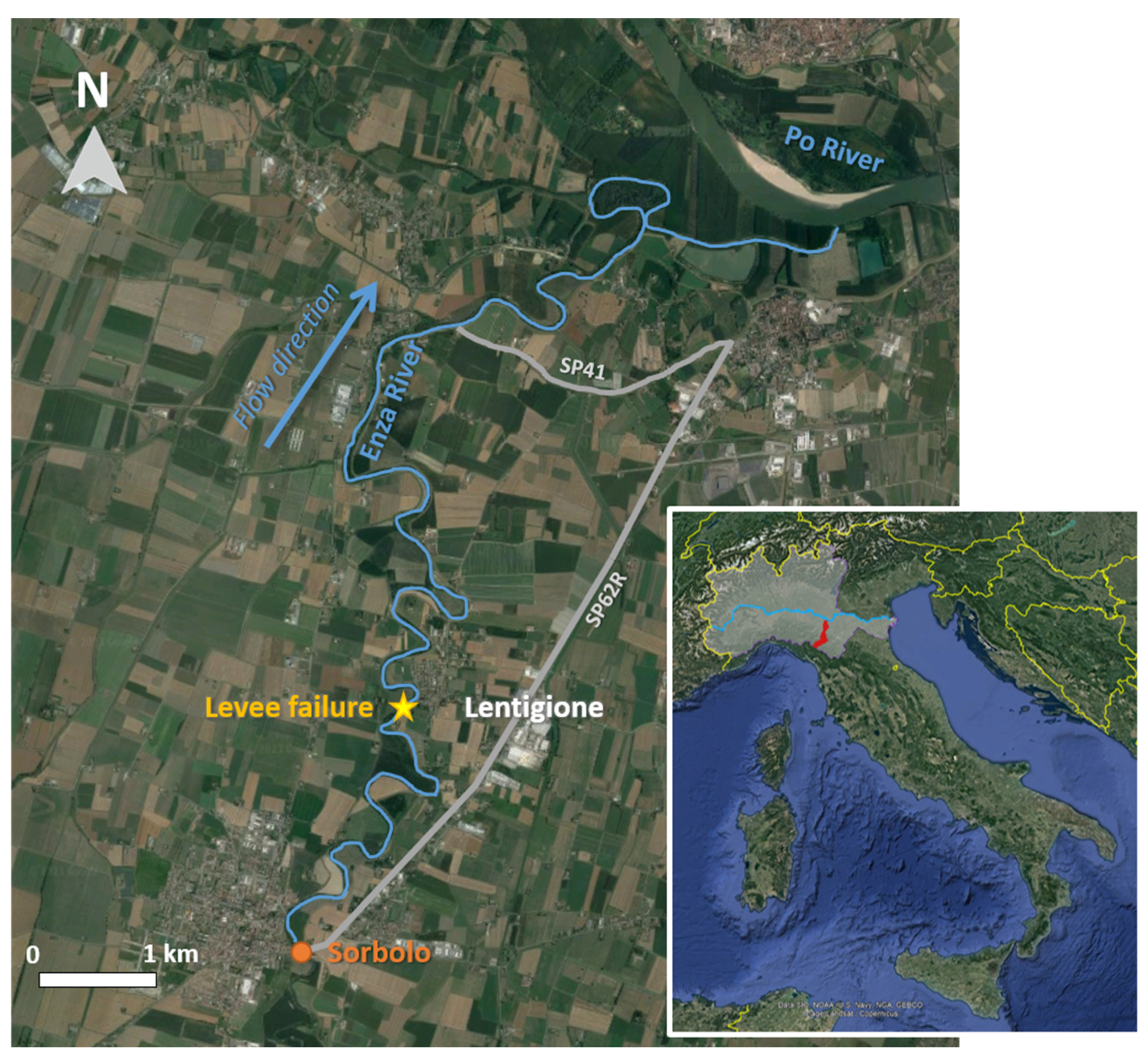
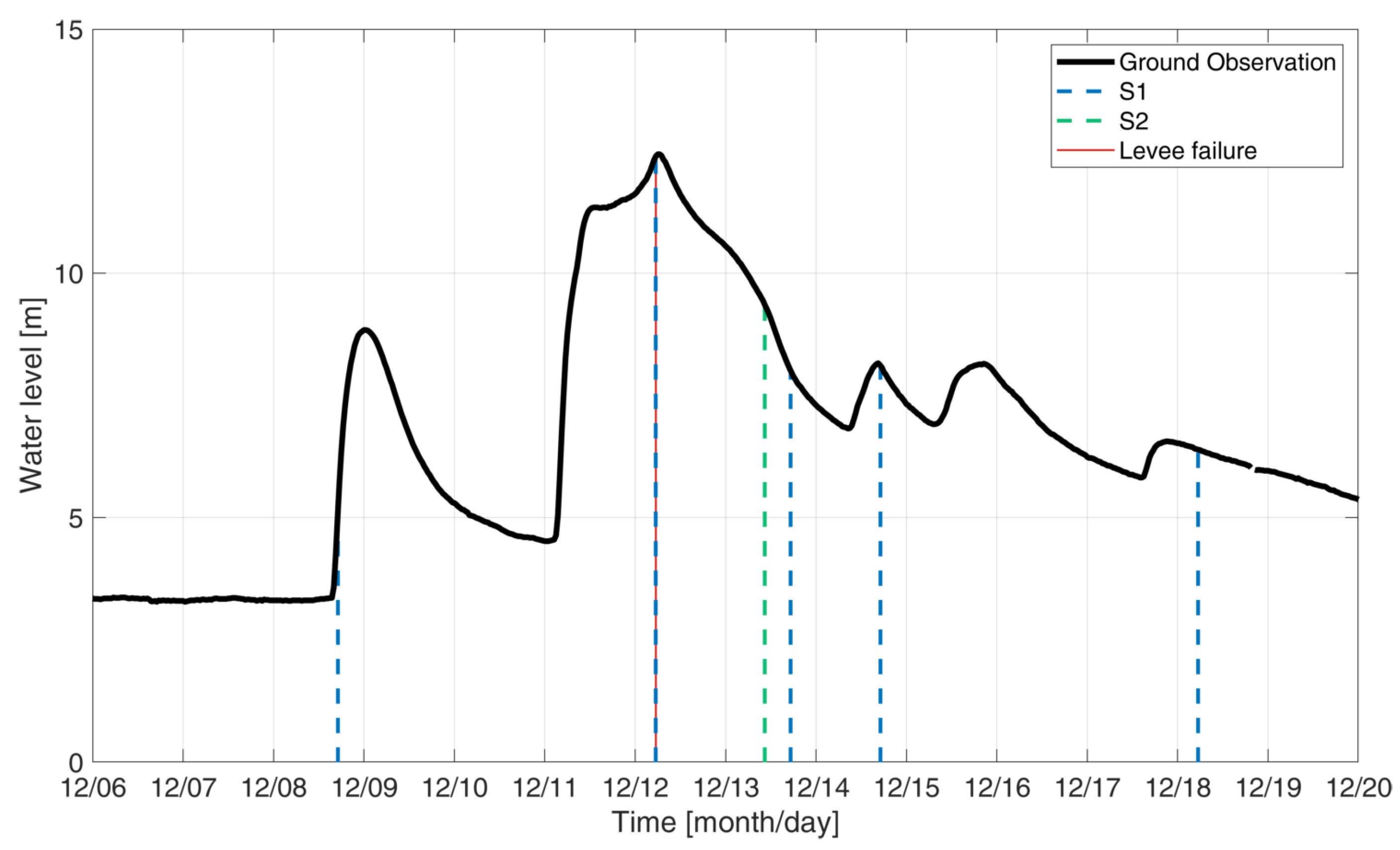
2.1. The Levee Failure Event and the Collected In Situ Observations
2.2. Satellite Images
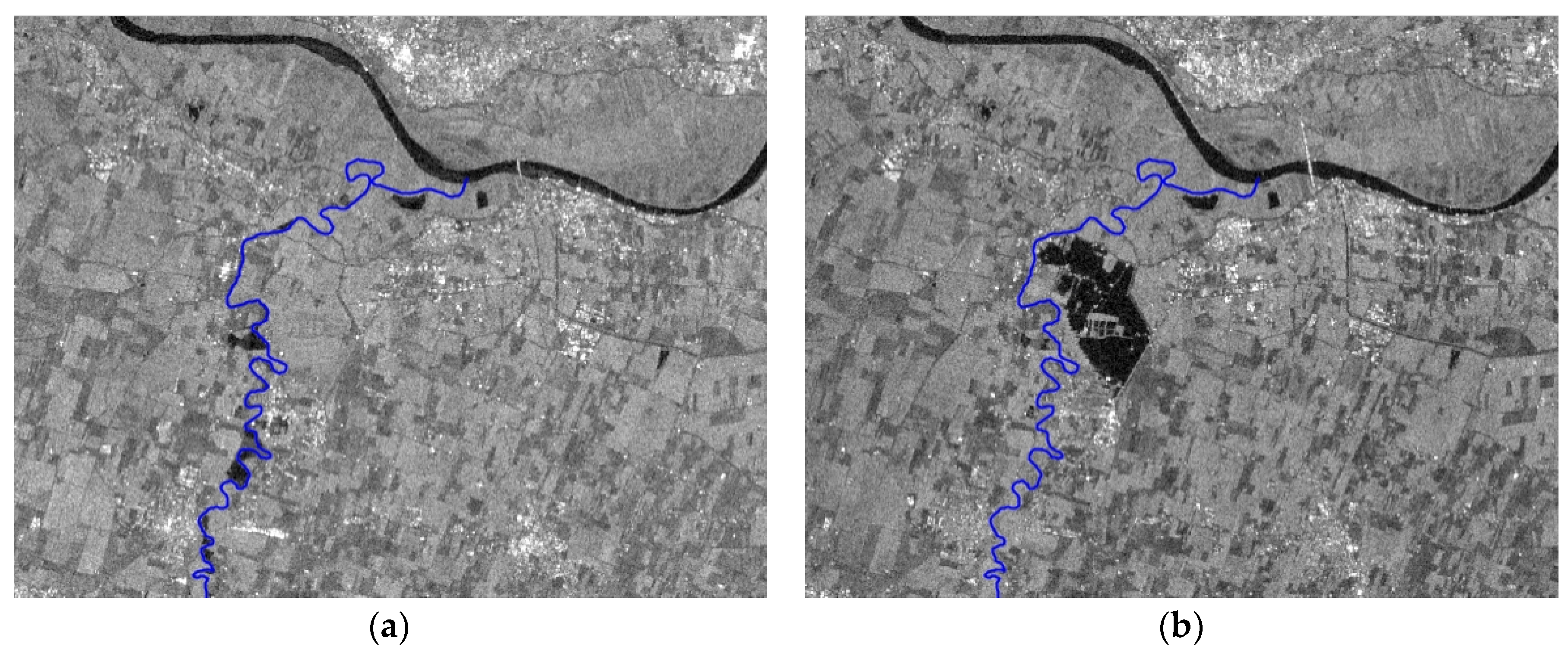
2.2.1. Sentinel-1 Images and Processing
2.2.2. Sentinel-2 Image and Processing
2.3. Flood Model
2.3.1. The 2D Hydraulic Model
2.3.2. Set up of the Model
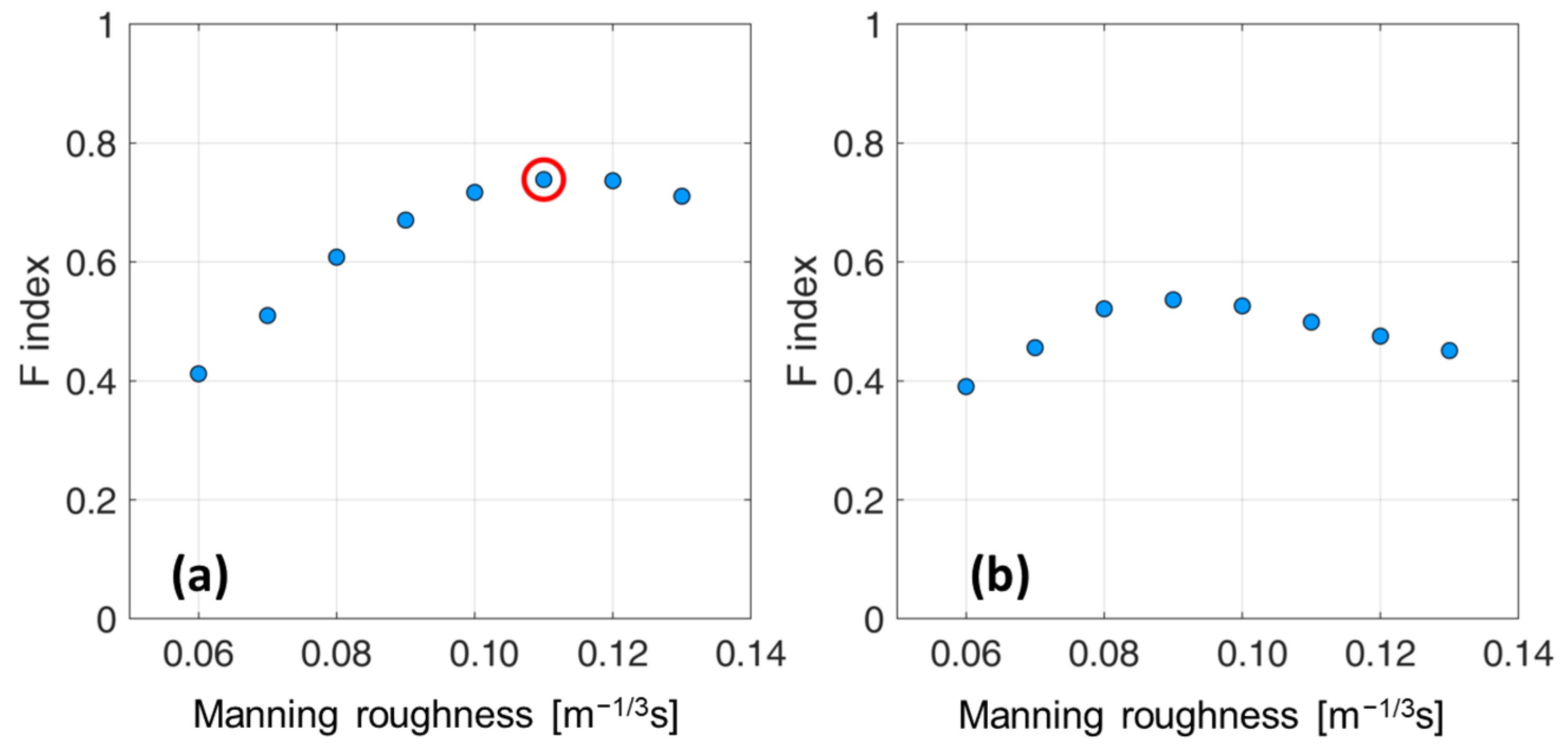
2.4. Calibration of the Hydraulic Model with the Satellite Images
3. Results
3.1. Satellite-Derived Flooded Area Maps
3.2. Dynamic Flood Modelling Results
3.3. Comparison with the Copernicus Emergency Service Flood Map
4. Discussion and Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Guerriero, L.; Ruzza, G.; Calcaterra, D.; Di Martire, D.; Guadagno, F.M.; Revellino, P. Modelling prospective flood hazard in a changing climate, Benevento Province, Southern Italy. Water 2020, 12, 2405. [Google Scholar] [CrossRef]
- Wang, Y.; Yang, X. A coupled hydrologic-hydraulic model (XAJ-HiPIMS) for flood simulation. Water 2020, 12, 1288. [Google Scholar] [CrossRef]
- Tufano, R.; Guerriero, L.; Annibali Corona, M.; Cianflone, G.; Di Martire, D.; Ietto, F.; Novellino, A.; Rispoli, C.; Zito, C.; Calcaterra, D. Multiscenario flood hazard assessment using probabilistic runoff hydrograph estimation and 2D hydrodynamic modelling. Nat. Hazards 2023, 116, 1029–1051. [Google Scholar] [CrossRef]
- Liu, Z.; Merwade, V. Accounting for model structure, parameter and input forcing uncertainty in flood inundation modeling using Bayesian model averaging. J. Hydrol. 2018, 565, 138–149. [Google Scholar] [CrossRef]
- Rajib, A.; Liu, Z.; Merwade, V.; Tavakoly, A.A.; Follum, M.L. Towards a large-scale locally relevant flood inundation modeling framework using SWAT and LISFLOOD-FP. J. Hydrol. 2020, 581, 124406. [Google Scholar] [CrossRef]
- Marcus, W.A.; Fonstad, M.A. Optical remote mapping of rivers at sub-meter resolutions and watershed extents. Earth Surf. Process. Landf. 2008, 33, 4–24. [Google Scholar] [CrossRef]
- Schumann, G.; Di Baldassarre, G.; Bates, P.D. The utility of space-borne radar to render maps of observed possibility of inundation. IEEE Trans. Geosci. Remote Sens. 2009, 45, 1715–1725. [Google Scholar] [CrossRef]
- Chini, M.; Hostache, R.; Giustarini, L.; Matgen, P. A Hierarchical Split-Based Approach for parametric thresholding of SAR images: Flood inundation as a test case. IEEE Trans. Geosci. Remote Sens. 2017, 55, 6975–6988. [Google Scholar] [CrossRef]
- Huang, C.; Chen, Y.; Zhang, S.; Wu, J. Detecting, extracting, and monitoring surface water from space using optical sensors: A review. Rev. Geophys. 2018, 56, 333–360. [Google Scholar] [CrossRef]
- DeVries, B.; Huang, C.; Armston, J.; Huang, W.; Jones, J.W.; Lang, M.W. Rapid and robust monitoring of flood events using Sentinel-1 and Landsat data on the Google Earth Engine. Remote Sens. Environ. 2020, 240, 111664. [Google Scholar] [CrossRef]
- Wieland, M.; Martinis, S. A modular processing chain for automated flood monitoring from multispectral satellite data. Remote Sens. 2019, 11, 2330. [Google Scholar] [CrossRef]
- Shen, X.; Wang, D.; Mao, K.; Anagnostou, E.; Hong, Y. Inundation extent mapping by synthetic aperture radar: A review. Remote Sens. 2019, 11, 879. [Google Scholar] [CrossRef]
- Ruzza, G.; Guerriero, L.; Grelle, G.; Guadagno, F.M.; Revellino, P. Multi-method tracking of monsoon floods using Sentinel-1 imagery. Water 2019, 11, 2289. [Google Scholar] [CrossRef]
- Tarpanelli, A.; Mondini, A.C.; Camici, S. Effectiveness of Sentinel-1 and Sentinel-2 for Flood Detection Assessment in Europe. Nat. Hazards Earth Syst. Sci. 2022, 22, 2473–2489. [Google Scholar] [CrossRef]
- Schumann, G.; Giustarini, L.; Tarpanelli, A.; Jarihani, B.; Martinis, S. Flood Modeling and Prediction Using Earth Observation Data. Surv. Geophys. 2022, 1–26. [Google Scholar] [CrossRef]
- Emergency Management Service. Available online: https://emergency.copernicus.eu/ (accessed on 7 March 2023).
- Destination Earth. Available online: https://digital-strategy.ec.europa.eu/en/policies/destination-earth (accessed on 7 March 2023).
- Digital Twin Earth—Hydrology. Available online: http://hydrology.irpi.cnr.it/projects/dte-hydrology/ (accessed on 7 March 2023).
- Brocca, L.; Barbetta, S.; Camici, S.; Ciabatta, L.; Dari, J.; Filippucci, P.; Massari, C.; Modanesi, S.; Tarpanelli, A.; Bonaccorsi, B.; et al. The Digital Twin Earth for the water cycle: Mapping the future with high-resolution earth observation. Front. Sci 2023. submitted. [Google Scholar]
- Dimitriadis, P.; Tegos, A.; Oikonomou, A.; Pagana, V.; Koukouvinos, A.; Mamassis, N.; Koutsoyiannis, D.; Efstratiadis, A. Comparative evaluation of 1D and quasi-2D hydraulic models based on benchmark and real-world applications for uncertainty assessment in flood mapping. J. Hydrol. 2016, 534, 478–492. [Google Scholar] [CrossRef]
- Neal, J.; Odoni, N.; Trigg, M.; Freer, J.; Garcia-Pintado, J.; Mason, D.C.; Wood, M.; Bates, P.D. Efficient incorporation of channel cross-section geometry uncertainty into regional and global scale flood inundation models. J. Hydrol. 2015, 529, 169–183. [Google Scholar] [CrossRef]
- Scotti, V.; Giannini, M.; Cioffi, F. Enhanced flood mapping using synthetic aperture radar (SAR) images, hydraulic modelling, and social media: A case study of Hurricane Harvey (Houston, TX). J. Flood Risk Manag. 2020, 13, e12647. [Google Scholar] [CrossRef]
- Dazzi, S.; Vacondio, R.; Mignosa, P. Integration of a Levee Breach Erosion Model in a GPU-Accelerated 2D Shallow Water Equations Code. Water Resour. Res. 2019, 55, 682–702. [Google Scholar] [CrossRef]
- Valtancoli, F. La rotta del fiume Enza del 2017: Ricostruzione idraulica e stima dei danni agli edifici residenziali. Università di Bologna, Corso di Studio in Ingegneria civile. Master’s Thesis, University of Bologna, Bologna, Italy, 2020. Available online: https://amslaurea.unibo.it/20288/ (accessed on 20 April 2023). (In Italian).
- Hostache, R.; Matgen, P.; Schumann, G.; Puech, C.; Hoffmann, L.; Pfister, L. Water level estimation and reduction of hydraulic model calibration uncertainties using satellite SAR images of floods. IEEE Trans. Geosci. Remote Sens. 2009, 47, 431–441. [Google Scholar] [CrossRef]
- Goffi, A.; Stroppiana, D.; Brivio, P.A.; Bordogna, G.; Boschetti, M. Towards an automated approach to map flooded areas from Sentinel-2 MSI data and soft integration of water spectral features. Int. J. Appl. Earth Obs. Geoinf. 2020, 84, 101951. [Google Scholar] [CrossRef]
- Feyisa, G.L.; Meilby, H.; Fensholt, R.; Proud, S.R. Remote sensing of environment automated water extraction index: A new technique for surface water mapping using Landsat imagery. Remote Sens. Environ. 2014, 140, 23–35. [Google Scholar] [CrossRef]
- McFeeters, S.K. The use of the normalized difference water index (NDWI) in the delineation of open water features. Int. J. Remote Sens. 1996, 17, 1425–1432. [Google Scholar] [CrossRef]
- Xu, H. Modification of normalised difference water index (NDWI) to enhance open water features in remotely sensed imagery. Int. J. Remote Sens. 2006, 27, 3025–3033. [Google Scholar] [CrossRef]
- Boschetti, M.; Nutini, F.; Manfron, G.; Brivio, P.A.; Nelson, A. Comparative analysis of normalised difference spectral indices derived from MODIS for detecting surface water in flooded rice cropping systems. PLoS ONE 2014, 9, e88741. [Google Scholar] [CrossRef]
- Shen, L.; Li, C. Water body extraction from landsat ETM+ imagery using adaboost algorithm. In Proceedings of the 2010 18th International Conference on Geoinformatics, Beijing, China, 18–20 June 2010; pp. 1–4. [Google Scholar] [CrossRef]
- Sinagra, M.; Nasello, C.; Tucciarelli, T.; Barbetta, S.; Massari, C.; Moramarco, T. A self-contained and automated method for flood hazard maps prediction in urban areas. Water 2020, 12, 1266. [Google Scholar] [CrossRef]
- Aricò, C.; Sinagra, M.; Begnudelli, L.; Tucciarelli, T. MAST-2D diffusive model for flood prediction on domains with triangular Delaunay unstructured meshes. Adv. Water Res. 2011, 34, 1427–1449. [Google Scholar] [CrossRef]
- Aricò, C.; Tucciarelli, T. MAST solution of advection problems in irrotational flow fields. Adv. Water Res. 2007, 30, 665–685. [Google Scholar] [CrossRef]
- Arpa Emilia Romagna. Available online: https://simc.arpae.it/dext3r/ (accessed on 7 March 2023).
- Aronica, G.; Bates, P.D.; Horritt, M.S. Assessing the uncertainty in distributed model predictions using observed binary pattern information within GLUE. Hydrol. Proc. 2002, 16, 2001–2016. [Google Scholar] [CrossRef]
- Tarpanelli, A.; Brocca, L.; Melone, F.; Moramarco, T. Hydraulic modelling calibration in small basins by using coarse resolution synthetic aperture radar imagery. Hydrol. Proc. 2013, 27, 1321–1330. [Google Scholar] [CrossRef]
- EMSR260. Available online: https://emergency.copernicus.eu/mapping/list-of-components/EMSR260/DELINEATION/ALL (accessed on 7 March 2023).
- DTE Hydrology Project. Available online: https://explorer.dte-hydro.adamplatform.eu/ (accessed on 20 April 2023).











Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tarpanelli, A.; Bonaccorsi, B.; Sinagra, M.; Domeneghetti, A.; Brocca, L.; Barbetta, S. Flooding in the Digital Twin Earth: The Case Study of the Enza River Levee Breach in December 2017. Water 2023, 15, 1644. https://doi.org/10.3390/w15091644
Tarpanelli A, Bonaccorsi B, Sinagra M, Domeneghetti A, Brocca L, Barbetta S. Flooding in the Digital Twin Earth: The Case Study of the Enza River Levee Breach in December 2017. Water. 2023; 15(9):1644. https://doi.org/10.3390/w15091644
Chicago/Turabian StyleTarpanelli, Angelica, Bianca Bonaccorsi, Marco Sinagra, Alessio Domeneghetti, Luca Brocca, and Silvia Barbetta. 2023. "Flooding in the Digital Twin Earth: The Case Study of the Enza River Levee Breach in December 2017" Water 15, no. 9: 1644. https://doi.org/10.3390/w15091644